1
Изобретение относится к системам автоматического контроля и регулирования.
Известно поворотное устройство, . содержащее два датчика, соединенные с объектом перемещения, два приемника, исполнительный двигатель, усилитель, задающий и отсчетный механизмы. Датчик точности отсчета выполнен в виде .многополосного вращающегося трансформатора, а датчик грубого отсчета выполнен в виде двухполюсного вращающегося трансформатора. Приемники точного и грубого отсчетов выполнены в виде двухполюсных вращающихся трансформаторов . валы датчиков кинематически связаны с задающим механизмом, а валы приемников - с валом исполнительного двигателя (возможен обратный вариант). Шкалы точного и грубого отсчетов углов поворота объекта перемещения установлены -на стороне приемников 11
Однако наличие двух датчиков и двух приемников усложняет конструкцию устройства. При развороте объекта перемещения на угол, равный целому числу градусов, отсчет углов необходимо производить не только по шкале грубого отсчета (градусной), но также по шкале точного отсчета (минутной и секундной) , что при ручном за,г дании углов снижает производительность работьа. Кроме того, при развороте объекта перемещения на некоторый угол, вал приемника точного отсчета должен развернуться на угол в К раз больший, где К - коэффициент электрической редукции, что снижает верхний предел возможных скоростей разворота объекта перемещения.
Наиболее близким по технической сущности к предлагаемому является поворотное устройство, содержащее чик, выполненный в виде многополюсного вращающегося трансформатора, вал которого соединен с объектом перемещения, приемник,выполненный в виде двухполюсного вращающегося трансфор20матора, исполнительный двигатель, усилитель, задающий механизм, дифференциал и шкалы точного и грубого отсчетов углов поворота объекта перемещения 2 .
25
Недостатки данного устройства заключаются в том, что при развороте объекта перемещения на угол, равный .целому числу градусов, отсчет углов необходимо производить не только по
30 шкале грубого отсчета; но также по
шкалам точного отсчета, вал приемника должен поворачиваться на угол в К раз больший, чем угол поворота вала датчика (К - коэффициент электрической редукции).
Цель изобретения - повышение быстродействия.
Поставленная цель достигается тем, что в поворотное устройство, содержащее датчик, выполненный в виде многполюсного вращающегося трансформатора, вал которого соединен с объектом перемещения и исполнительным механизмом, задающий механизм, соединенный с валом приемника, выполненного в виде двухполюсного вращающегося трансфО 5матора, усилитель, подключенный к обмотке управления исполнительным двигателем, введен переключатель, оди выход которого соединен с входом усилителя, а выход датчика соединен с первым входом переключателя, другой выход которого соединен с входом приемника, выход которого соединен с вторым входом переключателя.
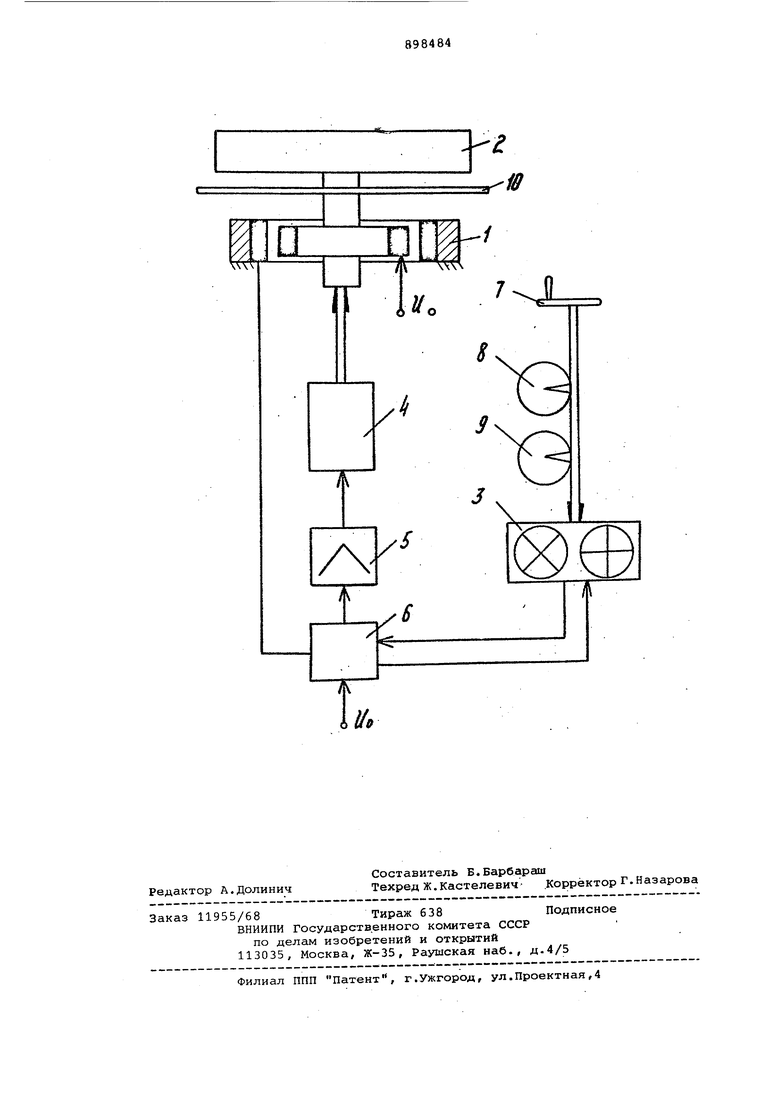
На чертеже изображена структурная схема поворотного устройства.
Устройство содержит датчик 1, выполненный в виде многополюсного вращающегося трансформатора, на валу которого расположен объект 2 перемещения, приемник 3, выполненный в виде двухполюсного вращающегося трансферматора, в качестве исполнительного можно использовать асинхронный двигатель 4, усилитель 5, переключатель б, задающий механизм (маховик) 7, секундная: 8, минутная 9 и градусная 10 шкалы.
Поворотное устройство работает следующим образом.
Если необходимо объект 2 перемещения развернуть на угол, равный целому числу градусов, то переключателем 6 сперва к обмотке управления асинхронного двигателя 4 подключают через усилитель 5 источник питания, затем в момент, когда объект перемещения развернется на угол близкий к требуемому, переключателем б к обмотке управления асинхронного двигателя 4 вместо истог ника питания подключаю Одну из выходных обмоток датчика 1. После разворота объекта 2 перемещения на требуемый угол сигнал на выходной обмотке датчика 1, а следовательно, на обмотке управления асинхронного двигателя 4, станет равным нулю и двигатель остановится. Если ..коэффициент электрической редукции К между датчиком 1 и приемником 3 равен 360°, то достаточно использовать только одну выходную обмотку датчика 1 независимо от того является требуемый угол разворота объекта перемещения четным или нечетным числом. Если , то при углах, являющихся четнйми числами, необходимо использовать одну выходную обмотку
датчика 1, например косинусную, а при углах являющихся нечетными числами - синусную. При развороте объекта перемещения на угол, равный целоМУ числу градусов, отсчет углов производят только по шкале грубого 10 отсчета. Точность задания углов определяется точностью расположения нIpeBHx точек выходных обмоток датчика 1 .
Если необходимо развернуть объект перемещения 2 на угол,равный дробному числу градусов, то его первоначално разворачивают на угол, равный целому числу градусов, аналогичным способом. Затем переключателем б выходные обмотки датчика 1 подключают к входным обмоткам приемника 3, выходная обмотка которого через усилитель 5 подключается к обмотке управления асинхронного двигателя 4. Маховик 7 поворачивают до тех пор, пока по шкалам 8 и 9 не получат отсчета, соответствующего дробной части градуса. Этот угол отрабатывается асинхронным двигателем 4.
Таким образом, использование предложенного устройства позволяет автоматизировать процесс разворота объекта перемещенияJ вал приемника поворачивается только на угол, пропорциональный дробной части грсхдуса, и при этом повышается скорость разворота объекта перемещения.
Экономический эффект от предлагаемого поворотного устройства определяется его техническими преимуществами .
Формула изобретения
Поворотное устройство, содержащее датчик, выполненный в виде многополюсного вращающегося трансформатора, вал которого соединен с.объектом пере-, мещения и исполнительным двигателем, задающий механизм, соединенный с валом приемника, выполненного в виде двухполюсного вращающегося трансформатора, усилитель, подключенный к обмотке управления исполнительного двигателя, отличающееся тем, что, с целью повышения быстродействия устройств в него введен переключатель, один выход которого соединен с входом усилителя, а выход датчика соединен с первым входом переключателя, другой выход которого соединен с входом приемника, выход которого соединен с вторым входом переключателя.
Источники информации, принятые во внимание при экспертизе
1.Чернышев В.О. Поворотные трансформаторы и их применение в вычислительных и автоматических устройствах. 1965, с.33-41.
2.Авторское свидетельство СССР NP 421021, кл. G 08 С 9/04, 1972 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Поворотное устройство | 1985 |
|
SU1254442A1 |
| Поворотное устройство | 1985 |
|
SU1332259A1 |
| ПОВОРОТНОЕ УСТРОЙСТВО | 1972 |
|
SU421021A1 |
| Устройство для задания угла поворота | 1979 |
|
SU849269A1 |
| Устройство для измерения погрешности многополюсного датчика угла | 1980 |
|
SU877723A1 |
| Устройство для отсчета угловых положений вала | 1975 |
|
SU627498A1 |
| Двухотсчетный преобразователь уголкод | 1974 |
|
SU482785A1 |
| Устройство для контроля многополюсных вращающихся трансформаторов | 1979 |
|
SU868815A1 |
| Устройство для измерения погрешности многополюсного датчика угла | 1977 |
|
SU726630A1 |
| Устройство для преобразования угла поворота вала в код | 1974 |
|
SU610148A1 |