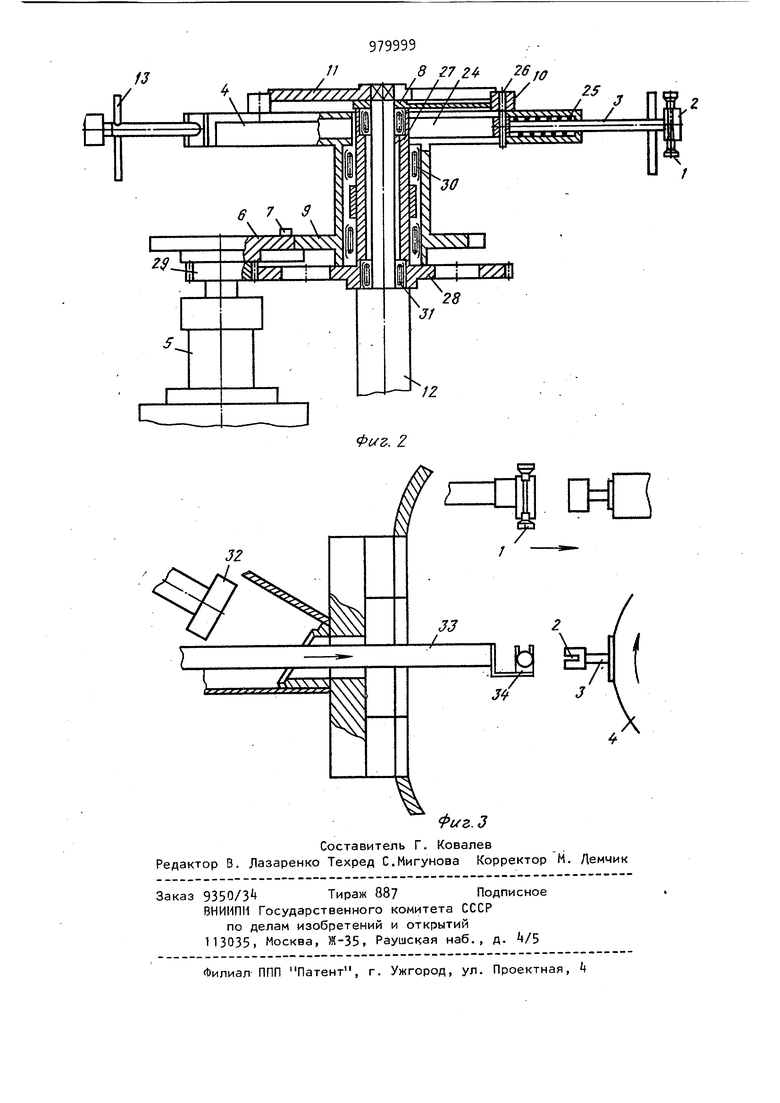
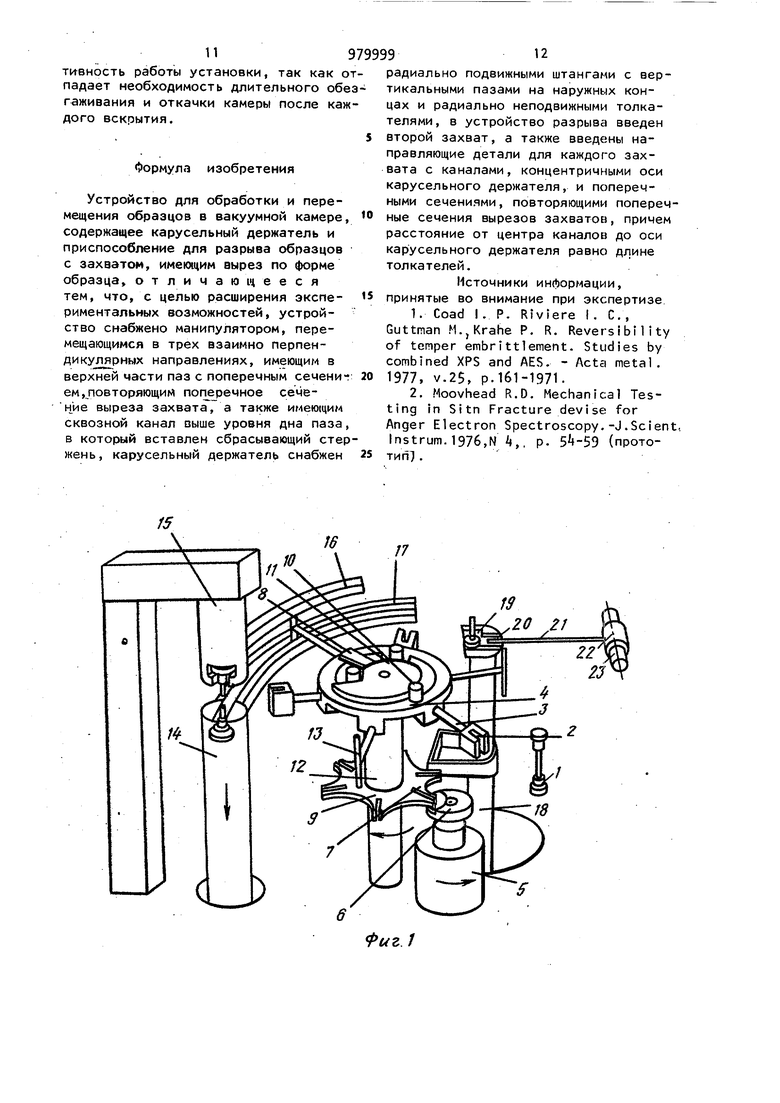
(5)УСТРОЙСТВО ДЛЯ ОБРАБОТКИ И ПЕРЕМЕЩЕНИЯ ОБРАЗЦОВ В ВАКУУМНОЙ КАМЕРЕ Изобретение относится к автомати ческому анализу химических и физичес ких свойств вещества и может быть ис пользовано, например, для исследова ний поверхности, образованной в результате разрыва материалов. В настоя1чее время известны установки, позволяющие проводить анализ поверхности разрушения, образовавшейся в результате ударных испыта-. НИИ СП. Разрушение материала при ударных испытаниях происходит в очень короткий промежуток времени, а при работе материала в реальных условиях он часто подвергается нагрузкамза длительные промежутки времени. Таким образом, возникает необходимость создания установок, позволяющих исследовать элементный состав поверхностей разрушения, возникших в результате растяжения и разрыва материала. Наиболее близким по технической сущности.к изобретению является устройство для обработки и перемещения образцов в вакуумной камере, в которой поверхность разрыва исследуется методом оже-спектроскопии, состоящее из карусельного держателя и приспособления для разрыва образцов с захватом, имеющим вырез по форме образца. Вращением карусельного держателя свободный конец одного из образцов, закрепленных на нем, заводят в приспособление для разрыва, после чего производится растяжение и разрыв образца. Далее для проведения оже-аиализа поверхности разрушения используется тот из обломков, который остается на карусельном держателе. Карусельный держатель поворачивают в позицию, в которой обломок располагается поверхностью разрушения к оже-спектрометру в точке, обеспечивающей его нормальную работу. Процесс повторяется до тех пор, пока не будут разорваны и исследованы все образцы, закрепленные на карусельном держателе Г2 . Конструктивной особенностью известного устройства является совмещение в карусельном держателе следующих функций: функции носителя образца до разрыва, функции одного из захватов при испытании, функции мани пулятора при переносе обломка после разрыва и установке его в нужную позицию при оже-анализе. Вследствие этого оно обладает следующими недостатками. Поскольку при вращении карусельного держателя конец образца, который должен войти в устройство разрыва, движется по дуге окружности, а затем, после разрыва,по дуге окружности меньшего радиуса движется место разрыва образца, то устройство ра рыва и анализатор поверхности должны располагаться друг от друга. Увеличение расстояния между ними воз можно лишь за счет увеличения диаметра карусельного держателя. Поскольку карусельный держатель выполняет, в частности, функцию захвата при испытании и по соображениям проч ности должен быть массивным, то эта возможность отсутствует из-за значи тельного возрастания веса карусельного держателя. Вследствие этого, при растяжении образца с его одновременным высокотемпературным нагревом ( что часто требуется по условиям испытаний ) происходит теплопередача от образца на анализатор поверхности нарушающая нормальный режим его работы, так как в результате даже не больших термических деформаций ухудшается разрешающая способность например, оже-спектрометра. Кроме это го, при малом расстоянии между устройством разрыва и анализатором поверхности механические колебания и толчки, неизбежные при работе устройства разрыва, увеличивают уровен шумов на выходе системы регистрации записи, например, оже-спектров, вынуждая исследователя уменьшать чувствительность измерительной аппаратуры. Наконец, закрепление плоских образцов в карусельном держателе из вестного устройства производится вручную с помощью штифтов, запрессо ванных в отверстия имеющиеся на го ловках. Это делает невозможным исследование с помощью этого устройЭ7ства образцов, непосредственный контакт с которыми опасен для исследователя, например образцов, облученных в ядерном реакторе потоком нейтронов. Цель изобретения - расширение экспериментальных возможностей устройства. Эта цель достигается тем, что в известное устройство для обработки и перемещения образцов в вакуумной камере, содержащее карусельный держатель и приспособление для разрыва образцов с захватом, имеющим вырез по форме образца, введен манипулятор, перемещающийся в трех взаимно перпендикулярных направлениях, имеющий в верхней части паз с поперечным сечением, повторяющим поперечное сечение выреза захвата, а также имеющий сквозной канал выше уровня дна паза, в который вставлен сбрасывающий стержень, кроме того, карусельный держатель снабжен радиально подвижными штангами с вертикальными пазами на наружных концах и радиальнс неподвижными толкателями, в устройство разрыва введен второй захват, а также введены направляющие детали для каждого захвата с каналами, концентричными оси карусельного держателя и поперечными сечениями, повторяющими поперечные сечения вырезов захватов, причем расстояние от центра каналов до оси карусельного держателя равно длине толкателей. На фиг. 1 представлена конструктивная схема устройства, позволяющая наглядно представить размещение и взаимодействие всех основных узлов; на фиг. 2 показано более детально устройство карусельного держателя; на фиг. 3 - схематически дистанционное шлюзовое устройство, которое позволяет автоматически передавать образец в камеру без существенного нарушения вакуума в ней. Цилиндрический образец 1 вставляется в вертикальный паз 2, прорезанный в утолщенном наружном конце подвижной штанги 3. Ширина паза обеспечивает перемещение рабочей части образца по скользящей посадке, не допуская перекоса образца. В той части паза, которая обращена к оси карусельного держателя 4, имеется неглубокая коническая выемка, диаметр которой равен диаметру пред головки образца. При размещении образца на карусельном держателе его верхняя предголовка располагается в коничес кой выемке, что увеличивает устойчи вость образца при вращении карусельного держателя от ввода вращения 5- На валввода вращения посажен поводок 6 со штифтом 7. Подвижный кулачок 8 вращается независимо от вращения карусельного держа теля k, что обеспечивается подшипниками и взаимодействием поводка 6 с Мальтийским крестом 9 в виде которого изготовлена нижняя часть карусельного держателя. На карусельном держателе имеется вращ&ющаяся втулка 10, неподвижный кулачок 11, насаженный на верхнюю часть опорной -.. стойки 12,толкатель 13, выполненный в виде тонкого стержня с вертикальным штифтом на конце. Приспособление для разрыва образцов им ет два захвата 14 и 15, около которых расположены направляющие детали 16 и 17. Манипулятор 18 имеет в вер ней части Паз 19, поперечное сечени и размеры которого повторяют форму размеры поперечного сечения канала направляющей детали 17, а нижняя ег часть связана непосредственно с сил фонным вводом перемещений. Выше уро ня дна паза 19 имеется сквозной канал 20, в который вставлен сбрасывающий стержень 21, конец которого прикреплен к детали 22, скользящей по цилиндрической направляющей детали 23, ориентированной вдоль направления перемещения манипулятор В устройстве карусельного держателя k (фиг.2 ) расположены тонкие радиально подвижные штанги 3, имеющие на наружном утолщенном конце вертикальные пазы 2 для размещения образца 1 , а также расположены толкатели 13, движение.которых происходит по окружности постоянного радиуса. Карусельный держатель имеет радиально расположенный канал 24, в котором по скользящей посадке может перемещаться штанга 3- Пружина 25 создает усилие, направленное к ос карусельного держателя, приложенное к штанге 3- Втулка 10 вращается на штифте 26, запрессованном в отвер,стие в штанге 3. Неподвижный кулачок 1.1 посажен на опорную стойку 12 карусельного держателя и своей боковой поверхностью взаимодействует с втулкой 10, задавая велич{1ну радиального расположения подвижной штанги 3- Под 96 вижный кулачок 8 посажен в верхний вырез детали 27, нижняя часть которой выполнена в виде зубчатого колеса 23, постоянно находящегося в сцеплении с зубчатым колесом 29, сидящим на валу ввода вращения 5 На вал ввода вращения посажен также поводок 6 со штифтом 7 Мальтийского креста 9- , Подшипники 30 обеспечивают свободное вращение детали 27, когда карусельный держатель находится в состоянии покоя. Подшипники 31 обеспечивают, вращение карусельного держателя на стойке 12. В дистанционном шлюзовом устоойстве для передачи образца в камеру без существенного нарушения вакуума в ней (фиг.З) вакуумный вентиль 32 изолирует камеру установки от шлюзовой камеры (не показана ). Проходное отверстие вентиля служит для ввода в камеру установки, штока 33 шлюзового устройства, имеющего на конце держатель 34, выполненный в виде двойной вилочки, которая ориентирована открытой стороной по ходу вращения карусельного держателя (показано стрелкой). На держателе находится образец 1, расположенный вертикально. Карусельный держатель 4 находится в такой позиции, когда вертикальный паз 2 подвижной штанги 3 расположен на прямой линии, проходящей через ось карусельного держателя и образец. Взаимное расположение штока и карусельного держателя таково, что нужное направление подвижной штанги обеспечивается в состоянии, когда Мальтийский крест карусельного держателя заторможен боковой поверхностью поводка 6 (фиг.2) и карусельный держатель не вращается. На фиг.З в верхней части показан для наглядности вид сбоку, на котором хорошо видно каким образом размещен образец на держателе шлюзового устройства. Установка работает следующим образом. Образец 1 вставлен рабочей частью в паз 2 подвижной штанги 3- Вращение карусельного держателя 4 осуществляется по часовой стрелке от ввода вращения 5. При этом поворачиваются против часовой стрелки поводок 6, имеющий штифт 7 и ведущее зубчатое колесо 29, находящееся в сцеплении с большим зубчатым колесом 28, находящимся на карусели. Зубчатые колеса хорошо видны на фиг.2,
поэтому на фиг.1 они не показаны. Большое.зубчатое колесо 28 жестко связано с узким подвижным куламком 8, который при непрерывном вращении ввода 5 также вращается непрерывно. При этом, .благодаря подшипникам 30 и 31 вращение зубчатого колеса 28 и кулачка 8 может происходить независимо от вращения карусельного держателя, которое происходит только тогда, когда штифт 7 поводка 8 находится в вырезе Мальтийского креста 9- Остальное время поводок своей боковой поверхностью взаимодействует с Мальтийским крестом, препятствуя его вращению. Таким образом, после каждого поворота на 60° карусельный держатель останавливается, прекращая вращение до тех пор, пока штифт поводка снова не войдет в вырез Мальтийского креста. Взаимное размещение узлов конструкции таково, что ось захватов Tt и 15 приспособления для разрыва образцов пересекается с осью подвижной штанги 3 когда карусельный держатель прекращает свое вращение. Подвижные штанги 3 постоянно испытывают усилие со стороны пружин 25 (фиг.2), находящихся в канале, направленное к оси карусельного держателя. Но смещению штанги обычно препятствует взаимодействие между втулкой 10 и боковой поверхностью кулачка 11, который при вращении карусельного держателя, обкатывается втулками 10. Таким образом, радиус дуги, по которой движется образец 1, размещенный в пазе подвижной штанги 3, в каждый момент определяется радиусом кулачка 11 в точке, где его касается втулка 10. Для того, чтобы образец при вращении держателя без Помех мог войти в вырезы захватов Ц и 15, радиус кулачка 11 вблизи этой позиции таков, что ось образца движется по среднему радиусу вырезов, пересекающему ось захватов. В момент остановки карусельного держателя ось образца совпадает с осью захватов. Конфигурация кулачка 11 такова, что резкое уменьшение его радиуса начинается на расстоянии, равном радиусу втулки 10 от позиции остановки штанги 3 в приспособлении для разрыва. Тем не менее, движение подвижной штанги 3 по дуге с радиусом, равным среднему радиусу вырезов в захватах, продолжается и на этом участке благодаря тому, что втулка
10 упирается в кулачок 8, который препятствует смещению штанги к оси до тех пор, пока ось образца не совпадет с осью захватов. Именно в этот момент штифт 7 поводка 6 выйдет из выреза Мальтийского креста 9 и карусельный держатель k прекратит свое вращение. В следующий момент кулачок 8 освободит втулку 10 и подвижная штанга 3 сместится к оси на расстояние, задаваемое изменением радиуса кулачка 11. Так как образец своими головками находится в вырезах захватов и не может смещаться радиально вместе со штангой, он выскальзывает из паза 2, оставаясь при этом в приспособлении для разрыва. Далее включается механизм движения нижнего захвата Н, который движется вниз, натягивая образец. После этого производится механическое испытание с разрывом образца, которое может сопровождаться нагревом образца до нужной температуры. С этой целью верхний захват 15 делается электриIчески изолированным от корпуса пристособления для разрыва и соединяется шиной с вакуумным электрическим вводом. После разрыва верхний обломо остается висеть в вырезе верхнего захвата 15, а нижний падает плоскостью головки на дно выреза нижнего захвата 14, устанавливаясь в вертикальном положении поверхностью разрушения вверх (фиг.1). Поскольку масса головки образца намного больше оставшейся после разрыва части, исклчается падение обломка на дно выреза боковой поверхностью. Ввод 5 вращается до тех лор, пока толкатель 13 не войдет в вырезы захватов, выталкивая обломки в каналы направляющих деталей 16 и 17 по которым они транспортируются дальше с помощью того же толкателя. Верхний обломок в промежуточной позиции выпадает из своего канала, попадая в. сборный лоток (.не показан). Транспортировка нижнего обломк производится в результате его скольжения на плоскости головки по дну канала направляющей детали 17 под действием толкателя. Она заканчивается после того, как обломок попадает в паз 19 манипулятора 18, для чего последний заранее выставляется в такое положение, при котором паз перекрывает канал направляющей детали 17, а дно канала и дно паза совпадают по уровню. Длина нижчей напраляющей 17 задает в основном расстоя ние от приспособления для разрыва до места, где проводится анализ образца. После заведения обломка в па 19 манипулятора 18 с помощью переме щений , задаваемых координатным столиком манипулятора, расположенным вне камеры, и передаваемых внутрь с помощью сильфона, производится смещение обломка а позицию для анализа. После проведения анализа манипулятор освобождается от обломка с помощью сбрасывателя, который устро ен следующим образом. Выше уровня дна паза 19 манипулятора сделан скво ной канал 20, направление которого совпадает с одной из осей смещения манипулятора в горизонтальной плоскости. Имеется сбрасывающий стержен 21, который одним своим концом всегда находится в канале 20, а другой его конец прикреплен к детали 22, ко торая может свободно скользить по цилиндрической направляющей 23, которая расположена в направлении другой горизонтальной оси манипулятора При движении манипулятора навстречу стержню 21 он выходит из канала 20 в паз 19 и выталкивает обломок в сборный лоток, укрепленный на несущей стойке манипулятора. Стержень 21 не мешает движению манипулятора вдоль направляющей 23, так как он свободно скользит вместе с деталью 22. В результате, после исследования поверхности разрыва паз манипулятора освобождается от обломка, что создает возможность многократного использования манипулятора. Поскольку и карусельный держатель также освобождается от образцов, которые были на нем расположены, то возникает возможность многократного использования всего комплекса устройства. Один из вариантов реализации этой возможности показан на фиг.З. где представлено схематическое устройство системы передачи образца в камеру с по-, мощью дистанционного шлюзового устройства. Работа установки с шлюзовым устройством происходит следующим образо Камера установки изолиревана от шлюзовой камеры вентилем 32. Назначение шлюзовой камеры состоит в том, что она в открытом состоянии обеспечивает свободный доступ к штоку 33, на котором расположен держатель 3, и в то же время может быть достаточно 9 быстро откачана до нужной степени вакуума, так, что открывание вентиля 32 не приведет к существенному нарушению вакуума в камере установки. С этой целью юпюзовая камера выполняется обычно намного меньше по размерам чем камера установки. После открывания вентиля 32 шток 33 с образцом вводится в открывшееся отверстие. Рабочая часть образца 1 вводится в паз 2 подвижной штанги 3- Для того, чтобы имело место точное совмещение штока 33 и подвижной штанги 3 карусельный держатель заранее выставляется в нужное положение . с помощью ввода вращения. При поступательном движении штока 33 рабочая часть образца вводится в паз-на всю его глубину, после чего вращением карусельного держателя образец 1 снимается с держателя штока З оставаясь в пазе 2 штанги карусельного держателя k. После этого шток 33 выводят из камеры, закрыйают вентиль 32. Дальнейшая работа с образцом производится так, как было описано выше. В том случае, когда требуется исследовать радиоактивные образцы, все операции проводятся аналогично. Если размещение активных образцов производится при открытой камере установки, то работа дистанционного устройства аналогична описанной выше для шлюзового устройства, с той разницей, что отсутствует шлюзовая камера. Благодаря размещению образца на карусельном держателе в вертикальных пазах подвижных штаяг без дополнительных механических креплений стало возможным использовать для передачи образцов на карусельный держатель дистанционное устройство. Это расширяет экспериментальные возможности установки, позволяя применить ее к исследованиям радиоактивных образцов, например образцов, облученных в ядерном реакторе, поскольку при загрузке таких образцов в установку исследователь должен находиться от них,как правило, на расстоянии 1-1,5 м. Возможность дистанционной передачи образцов на карусельный держатель позволяет производить замену образцов без вскрытия камеры установки с помощью дистанционного шлюзового устройства, что резко повышает эффекТ14вность работы установки, так как падает необходимость длительного об гаживания и откачки камеры после ка дого вскрытия. Формула изобретения Устройство для обработки и перемещения образцов в вакуумной камере содержащее карусельный держатель и приспособление для разрыва образцов с захватом, имекнцим вырез по форме образца отличающееся тем, что, с целью расширения экспериментальных возможностей, устройство снабжено манипулятором, перемещающимся в трех взаимно перпен. yjOSP направлениях, имеющим в верхней части паз с поперечным сечением,повторяющим пог1еречное сечен е выреза захвата, а также имекицим сквозной канал оыше уровня дна паза в который вставлен сбрасывающий стер жень, карусельный держатель снабжен 99 радиально подвижными штангами с вертикальными пазами на наружных концах и радиально неподвижными толкателями, в устройство разрыва введен второй захват, а также введены направляющие детали для каждого захвата с каналами, концентричными оси карусельного держателя, и поперечными сечениями, повторяющими поперечные сечения вырезов захватов, причем расстояние от центра каналов до оси карусельного держателя равно длине толкателей. Источники информации, принятые во внимание при экспертизе 1.Coad I. Р. Riviere I. С., Guttman M.,Krahe P. R. Reversibility of temper embrittlement. Studies by combined XPS and AES. - Acta metal 1977, v.2$, p.161-1971. 2,Moovhead R.D. Mechanical Testing in Sitn Fracture devise for Anger Electron Spectroscopy.-J.Scient. lnstrum.1976,N i,, p. (прототип .
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ВВОДА ОБРАЗЦА В ВАКУУМНУЮ КАМЕРУ | 2009 |
|
RU2389004C1 |
| Оже-спектрометр | 1979 |
|
SU795308A1 |
| Карусельная вакуумная печь | 1978 |
|
SU832285A1 |
| КАЛИТКА | 2013 |
|
RU2538518C1 |
| Машина для разделки и укладки в банки копченой рыбы | 1976 |
|
SU604550A1 |
| Устройство для закалки деталей | 1980 |
|
SU885299A1 |
| Устройство для автоматической смены кассет | 1989 |
|
SU1686477A1 |
| ТУРНИКЕТ | 2009 |
|
RU2387782C1 |
| ВАКУУМНЫЙ СТАН ПОПЕРЕЧНО-КЛИНОВОЙ ПРОКАТКИ | 1996 |
|
RU2106223C1 |
| Способ автоматической подачи заготовок в технологическое оборудование и устройство для его осуществления | 1984 |
|
SU1301690A1 |