Изобретение относится к машиностроению и может быть использовано в технологических комплексах гибких автоматизированных производств, преимущественно в крупносерийном производстве.
Цель изобретения - расширение технологических возможностей за счет обеспечения совмещения траекторий перемещения заготовок в зоне обработки механическими руками автоматического манипулятора.
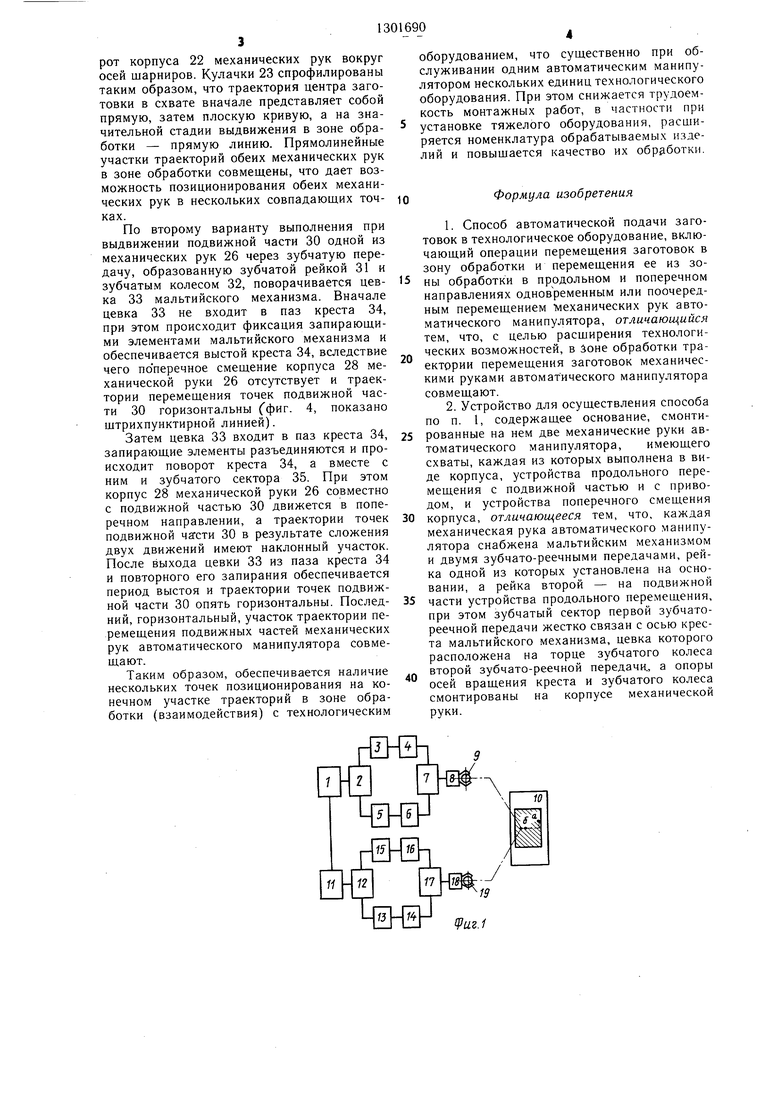
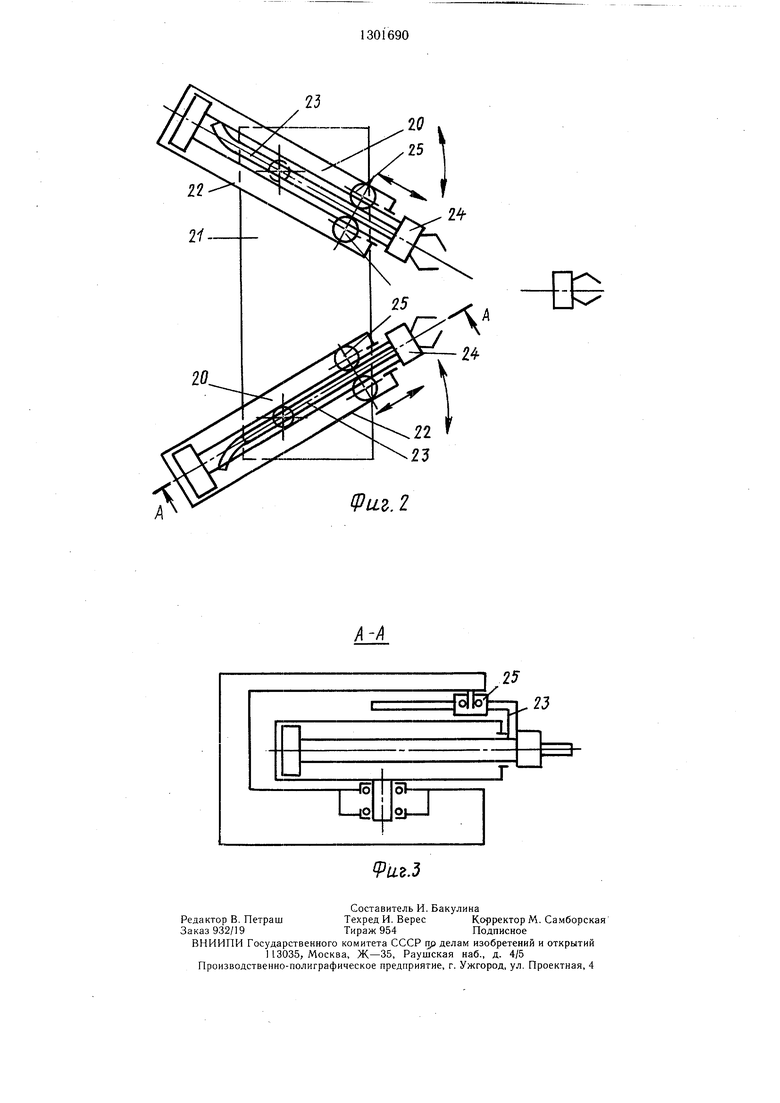
На фиг. 1 изображена схема автоматического устройства для осуществления способа; на фиг. 2 - первый вариант выполнения устройства; на фиг. 3 - сечение А-А на фиг. 2; на фиг. 4 - второй вариант выполнения устройства.
Автоматический манипулятор состоит из двух механических рук, одна из которых содержит привод 1, разветвляющую передачу 2, механизм 3 с постоянным и механизм 4 с переменным соотношением скоростей входного и выходного звеньев в устройстве выдвижения механической руки, соответствующие механизмы 5 и 6 в устройстве поперечного смещения механической руки, механизм 7 суммирования движений и рабочий орган (схват) 8 с обработанной заготовкой 9, предварительно перемещенной из зоны 10 обработки (заштриховало) технологического оборудования.
Вторая механическая рука также содержит привод 11, разветвляющуюся передачу 12, механизмы 13-16 с постоянным и переменным соотношением скоростей входного и выходного звеньев в устройствах выдвижения и поперечного смещения механической руки, су.ммирующий механизм 17, рабочий орган (схват) 18 с заготовкой 19, подлежащей перемещению в зону 10 обработки технологического оборудования.
Автоматический манипулятор по первому ьарианту выполнения представляет собой симметричную конструкцию с двумя механическими руками 20 со схватами, смонтированными на основании 21. Устройство поперечного смещения каждой механической руки манипулятора выполнено в виде корпуса 22, соединенного с основанием посредством цилиндрического шарнира, и в виде кулачкового механизма, имеющего кулачок 23 с профильными пазами, смонтированный на подвижной части 24 механической руки, и ролики 25, расположенные на основании 21.
Автоматический манипулятор по второму варианту представляет собой симметричную конструкцию с двумя механическими руками 26 со схватами, смонтированными на основании 27. Корпуса 28 механических рук 26 установлены на направляющих поперечного смещения. Приводы 29 через подвижные части 30 продольного перемещения, зубчатые рейки 31, установленные на подвижных частях 30, зубчатое колесо 32 одной зубчато-реечной передачи, а также цевки 33, жестко закрепленные на торцах зубчатых колес 32, кресты 34 мальтийских механиз
мов и жестко связанные с крестами 34 зубчатые секторы 35 кинематически связаны с зубчатыми рейками 36, установленными на основании 27. При этом зубчатые секторы 35 и зубчатые рейки 36 образуют другую зубчато-реечную передачу. А опоры осей вращения зубчатых колес 32 с цевками 33 и крестов 34 с зубчатыми секторами 35 смонтированы на корпусах 28 механических рук 26.
Автоматический манипулятор работает следующим образом.
При работе автоматического манипулятора рабочий орган (схват) 18 каждой из двух механических рук движется по заранее заданной траектории (фиг. 1, показано
щтрихпунктирной линией). Вначале первая механическая рука без заготовки в рабочем органе (схвате) 8 перемещается в зону 10 обработки оборудования до положения, соответствующего точке а на траектории, т. е положение захвата заготовки 9. При этом прив.од 1 через разветвляющуюся передачу 2 передает движение механизмов 3-6 и через суммирующий механизм 7 на рабочий орган (схват) 8. Для обеспечения горизонтального участка траектории движение
через устройство поперечного смещения передаваться не должно, что осуществляется путем выстоя выходного звена механизма 6. Наклонный участок траектории формируется, когда после выстоя механизм 6 начинает передавать движение на механизм 7, геометрически складывающий скорости выдвижения и поперечного смещения; горизонтальный участок в зоне обработки образуется при повторном выстое выходного звена механизма 6, вертикальный участок траектории с окончанием в точке а,
соответствующий движению введения и выведения детали и заготовки из зажимного приспособления, обеспечивается выстоем выходного звена механизма 4.
После захвата обработанной заготовки 9 привод реверсирует и движение с заготовкой 9 происходит по той же траектории в обратном направлении с окончанием в положении, показанном на чертеже. Далее в описанной последовательности происходит движение рабочего органа (схвата) 18 с заготовкой 19 в зону обработки с окончанием в точке а, соответствующей положению введения заготовки в зажимное приспособление технологического оборудования 10.
Горизонтальные участки обеих траекторий, совмещенные в зоне обработки, позволяют обеспечить совпадение нескольких точек позиционирования обеих механических рук, например точек б, соответствующих позиции загрузки заготовок в другое технологическое оборудование этим же автоматическим манипулятором. Автоматический манипулятор работает следующим образом. При выдвижении подвижных частей 24 механических рук происходит также пово
рот корпуса 22 механических рук вокруг осей шарниров. Кулачки 23 спрофилированы таким образом, что траектория центра заготовки в схвате вначале представляет собой прямую, затем плоскую кривую, а на значительной стадии выдвижения в зоне обработки - прямую линию. Прямолинейные участки траекторий обеих механических рук в зоне обработки совмещены, что дает возможность позиционирования обеих механических рук в нескольких совпадающих точках.
По второму варианту выполнения при выдвижении подвижной части 30 одной из механических рук 26 через зубчатую передачу, образованную зубчатой рейкой 31 и зубчатым колесом 32, поворачивается цев- ка 33 мальтийского механизма. Вначале цевка 33 не входит в паз креста 34, при этом происходит фиксация запирающими элементами мальтийского механизма и обеспечивается выстой креста 34, вследствие чего по перечное смещение корпуса 28 механической руки 26 отсутствует и траектории перемещения точек подвижной части 30 горизонтальны Сфиг. 4, показано штрихпунктирной линией).
Затем цевка 33 входит в паз креста 34, запирающие элементы разъединяются и происходит поворот креста 34, а вместе с ним и зубчатого сектора 35. При этом корпус 28 механической руки 26 совместно с подвижной частью 30 движется в поперечном направлении, а траектории точек подвижной ча сти 30 в результате сложения двух движений имеют наклонный участок. После выхода цевки 33 из паза креста 34 и повторного его запирания обеспечивается период выстоя и траектории точек подвижной части 30 опять горизонтальны. Последний, горизонтальный, участок траектории перемещения подвижных частей механических рук автоматического манипулятора совмещают.
Таким образом, обеспечивается наличие нескольких точек позиционирования на конечном участке траекторий в зоне обработки (взаимодействия) с технологическим
оборудованием, что существенно при обслуживании одним автоматическим манипулятором нескольких единиц технологического оборудования. При этом снижается трудоемкость монтажных работ, в частности при установке тяжелого оборудования, расширяется номенклатура обрабатываемых изделий и повыщается качество их обработки.
Формула изобретения
1.Способ автоматической подачи заготовок в технологическое оборудование, включающий операции перемещения заготовок в зону обработки и перемещения ее из зоны обработки в продольном и поперечном направлениях одновременным или поочередным перемещением механических рук автоматического манипулятора, отличающийся тем, что, с целью расщирения технологических возможностей, в Зоне обработки траектории перемещения заготовок механическими руками автоматического манипулятора совмещают.
2.Устройство для осуществления способа по п. 1, содержащее основание, смонтированные на нем две механические руки автоматического манипулятора, имеющего схваты, каждая из которых выполнена в виде корпуса, устройства продольного перемещения с подвижной частью и с приводом, и устройства поперечного смещения корпуса, отличающееся тем, что, каждая механическая рука автоматического манипулятора снабжена мальтийским механизмом и двумя зубчато-реечными передачами, рейка одной из которых установлена на основании, а рейка второй - на подвижной части устройства продольного перемещения, при этом зубчатый сектор первой зубчато- реечной передачи жестко связан с осью креста мальтийского механизма, цевка которого расположена на торце зубчатого колеса второй зубчато-реечной передачи., а опоры осей вращения креста и зубчатого колеса смонтированы на корпусе механической руки.
ipuz.l
25
(Ри,г.2
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматический манипулятор | 1989 |
|
SU1660951A1 |
| Манипулятор | 1989 |
|
SU1673430A1 |
| Мальтийский механизм | 1982 |
|
SU1084521A1 |
| Устройство для подачи штучных заготовок в зону обработки | 1976 |
|
SU607625A1 |
| РЕГУЛИРУЕМОЕ УСТРОЙСТВО ДЛЯ ПРЕОБРАЗОВАНИЯ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ В КОЛЕБАТЕЛЬНОЕ | 2005 |
|
RU2307271C1 |
| Устройство для комплектования пакета дисковых заготовок с технологическими прокладками | 1977 |
|
SU738821A1 |
| Роботизированный технологический комплекс | 1985 |
|
SU1294601A1 |
| Манипулятор | 1989 |
|
SU1660953A1 |
| УСТРОЙСТВО ДЛЯ УКЛАДКИ ИЗДЕЛИЙ ПРЕИМУЩЕСТВЕННО В МНОГОРЯДОВНЫЕ КАССЕТЫ | 1989 |
|
RU2013899C1 |
| Автоматическая линия для многопереходной штамповки | 1987 |
|
SU1565563A1 |
Изобретение относится к области машиностроения- и может быть использовано в технологических комплексах гибких автоматизированных производств, преимущественно в крупносерийном производстве. Целью изобретения является расширение технологических возмбжностей за счет обеспечения совмеш,ения траектории перемещения заготовок в зоне обработки механическими руками автоматичсског о манипулятора. Автоматический манипулятор представляет собой симметричную копетрукинк) с двумя механическими руками 26 со тами, смонтированными на основании 27. Корпуса 28 механических рук 26 установлены на направляющих поперечного смещения. Приводы 29 через подвижные части 30, зубчатые рейки 31, установленные на подвижных частях 30, зубчатое колесо 32, а также цевки 33, жестко закрепленные на торцах зубчатых колес 32, кресты 34 мальтийских механизмов и жестко связанные с крестами 34 зубчатые секторы 35 кинематически связаны с зубчатыми рейками 36, установленными на основании 27. При этом опоры осей вращения зубчатых колес 32 и крестов 34 смонтированы на корпусах 28 механических рук 26. 2 с.п. ф-лы, 4 ил. i СЛ ЗВ 35 3 со 30 О5 со fuzA
Составитель И. Бакулина
Редактор В. ПетрашТехред И. ВересКорректор М. Самборская
Заказ 932/19Тираж 954Подписное
ВНИИПИ Государственного комитета СССР пр делам изобретений и открытий
1 13035, Москва, Ж-35, Раушская наб., д. 4/5 Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
9иъ.
| Капельная масленка с постоянным уровнем масла | 0 |
|
SU80A1 |
| Транспортно-загрузочные устройства фамилии «Пирин | |||
| Каталог.Болгария | |||
| Л., Выставка «Роботы 82. | |||
