(54) СТОЙКА ДЛЯ СНОВАЛЬНЫХ ВАЛИКОВ ШЛИХТОВАЛЬНОЙ МАШИНЫ

| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ФОРМИРОВАНИЯ ТКАЦКИХ НАВОЕВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2061807C1 |
| Стойка сновальных валиков шлихтовальной машины | 1990 |
|
SU1781337A1 |
| Способ формирования ткацких навоев | 1977 |
|
SU690094A1 |
| Стойка сновального валика шлихтовальной машины | 1990 |
|
SU1737041A1 |
| Стойка сновальных валиков | 1980 |
|
SU939610A1 |
| СПОСОБ ФОРМИРОВАНИЯ ТКАЦКИХ НАВОЕВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2278913C2 |
| Устройство для регулирования вытяжки основы на шлихтовальной машине | 1983 |
|
SU1100338A1 |
| БИБЛИОТЕКА Ивановский текстильный институт им. М. В. Фрунзе | 1973 |
|
SU386038A1 |
| Регулятор натяжения нитей основы | 1977 |
|
SU745981A1 |
| Устройство для регулирования натяжения основы | 1986 |
|
SU1341280A1 |
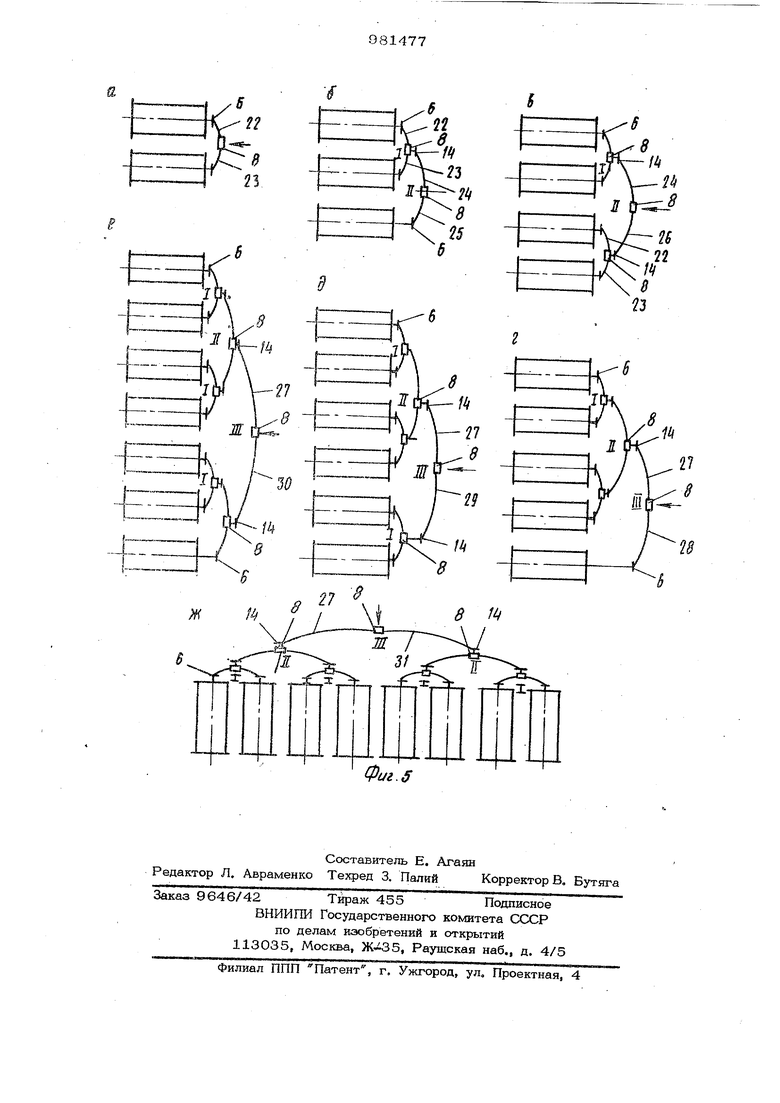
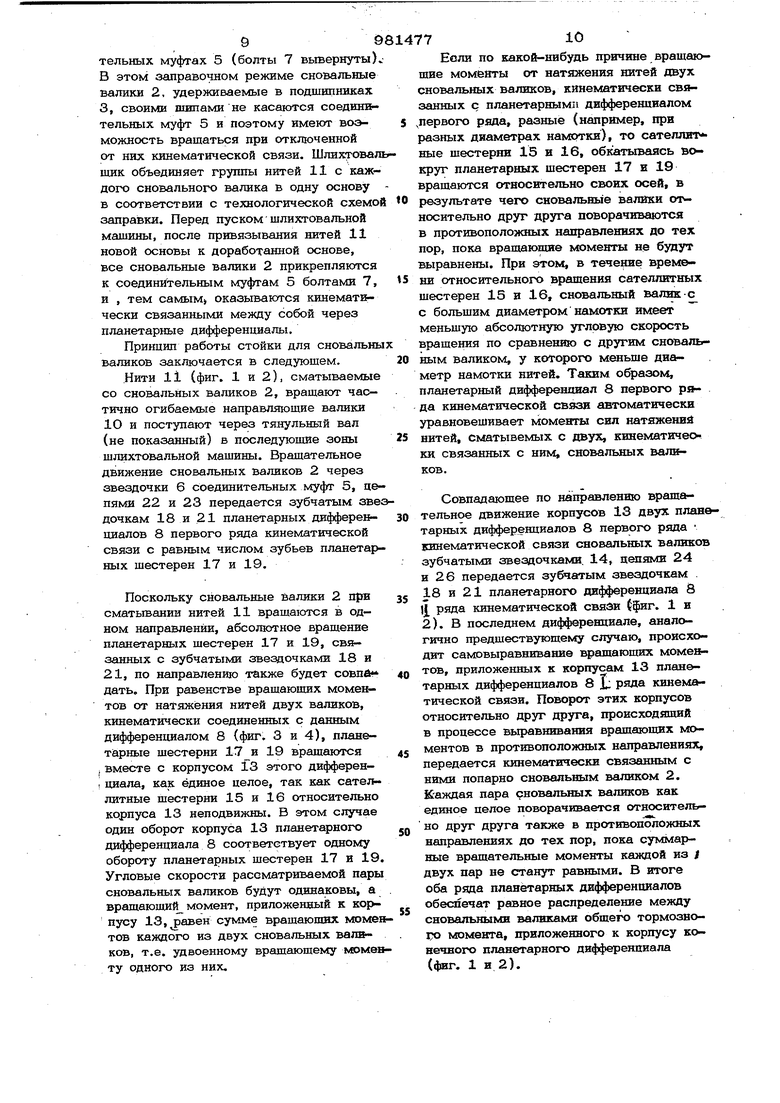
Изобретение относится коборудованию ткацкого производства и предназначено для сматывания нитей с партии сновальных валиков на шлихтовальной машине при подготовке основ к ткачеству в текстильной промышленности. Известна стойка для сновальных валиков шлихтовальной машины, представляющая собой раму, собираемую из отдельных секций, число которых зависит от числа сновальных валиков 1 j . Сновальные валики на секциях установлены в подшипниках скольжения и снабжены индивидуальными тормозными приспособлениями, каждое из которых состоит из тормозной ленты, охватывак щей тормозной шкив сновального валика, и грузового рычага с грузом. Недостатками данной стойки smnsnoTCH отсутствие автоматического выравнивания натяжения групп нитей, сматывающихся с различных сновальных валиков, и неудобство обслуживания, так как в процессе сматывания необходимо вручную изменять положение грузов на рычагах каждого валика; Известна стойка для сновальных валиков шлихтовальной машины, состоящая из чугунных рам, соединенных между собой связями, и несущая фрикционные электромагнитные муфты, установленные с обеих ее сторон, и сновальные вапйни в подшипниках, на осях которых закреплены стальные диски с возмохшостью ос&вого перемещения. Такая стойка с электромагнитным средством торкюжения сновальных валиков позволяет осуществлять торможение их лишь при останове щлиз&товальной машины и при переходе с рабочего на тихий ход, предотвращая забегание валиков. На рабочем ходу шлихтовальной машины электрический ток в электромагниты не поступает. Поэтому для устранения провисания шлихтовальщик вручную, с помоиЛью специальных маховиков, установленных на стойке шлихтовальной машины, прижимает (|чрикционные муфты к сновальным валикам для постоянного торможения их трением о диски 1 j . . Данное устройство обладает теми же недостатками: отсутствием автоматического выравнивания натяжения групп нитей разных сновальных валикЬв и неудобством индивидуального ручного обслуживания каждого валика. Известна стойка для сновальных валиков шлихтовальной машины, включающая в себя тормозные дуфты и охватываюшие их тормозные ленты, один конец каждой из которых снабжен пружинным динамометром и связан с продольным валом 2 J . На таких стойках общее суммарное натяжение нитей .остается постоянным в процессе сматывания, но не устраняется неравномерность натяжения по ширине полотна основы, возникающая за счет разницы в величинах суммарных натяжений групп нитей, сматывающихся с различных валиков. Известна также стойка для сновальных валиков шлихтовальной машины, содержащая дополнительно к предьщущим указанным элементам кронштейны, каждый из которых имеет прорезь для фиксации второго конца тормозной ленты по средством соединенной с ней пальца, входящего в прорезь | 3 j . Это устройство устраняет неравномер ность натяжения нитей по ширине полотн основы, но требует периодической ручно перестановки концов тормозных лент в Прорезях кронштейнов для каждого снов ного валика. Известная стайка для сновальных ба ков шлихтовальной машины, осуществляю щая автоматическое рйстормаживание ва диков в процессе сматьгоания в зависимости от массы нитей на валиках 4 . Однако, тормозные моменты, приложенные к валикам, непосредственно не уравновешиваются. Поэтому даже при равных диаметрах намотки нитей на валиках, суммарное натяжение грухш ните сматывающихся с различных валиков, не будет одинаковым, так как практически всегда имеется различие в объемной плотности намотки. Следовательно, данная стойка сновальных валиков, сохраня постоянным суммарное натяжение всех нитей при сматьгоании, не устраняет неравномерности натяжения их по ширине полотна основы. Известна стойка для сновальных валиков шлихтовальноймашша,, на которой кинематическн связанным сноальным валикам сообщается принуительное врашение от тянульного вала, асположенного перед клеевым аппараом. Натяжение нитей на ней создается постоянной разностью линейных скоростей вращения тянульного вала и сновальных валиков за счет кинематической схемы 5 Т . Эта и другие известные стойки сновальных валиков с принудительной раскаткой- очень чувствительны к разнице в диаметрах намотки нитей на валиках. Со сновальных валиков, имеющие большие диаметр ы намотки, сматывается большая длина нитей, чем со сновальных валиков, имеющих меньшие диаметры. Отсюда и разные натяжени;я сматываемых нитей. Более того, через определенный промежуток времени с момента пуска шлихтовальной машины нити начнут провисать. Вследствие этих недостатков существующие . стойки для принудительной раскатки сновальных валиков не нашли широкого промышленного применения., Наиболее близким к предлагаемому устройству 5гвляется стойка для сновальных валиков, шлихтовальной машины, содержащая раму, по обеим сторонам которой установлены опоры для сновальных валиков с соединительными муфтами по числу сновальных валиков, и средство управления муфтами { 6 . Недостатком данного устройства я&ляется отсутствие самовыравнивания тормозных моментов, приложенных к сновальным валикам, вследствие чего натяжение нитей по ширине полотна основы в процессе сматывания неравномерно. Кроме того, такую стойку неудобно обслуживать. Цель изобретения - снижение неравномерности натяжения по ширине полотна основы, возникающей за счет разницы в суммарных натяжениях групп нитей. Сматывающихся с различных валиков. Указанная цель достигается тем, что у стойки для сновальных валиков шлихтовальной машины, содержащей раму, по обоим сторонам которой установлены опоры для сновальных валиков с соединительными муфтами по числу сновальных валиков, и средство управления муфтами, соединительные муфты установлены в ряд, соос- но опорам, а средство управления муфтами выполнено в виде установленных рядами один за другим планетарных дифференциалов, корпус каждого из которых смонтирован между соединительными муфтами свободно на раме, причем каждая планетарная шестерня планетарного дифференциала псгследуюшего ряда кинематически связана с двумя соседними ведо мыми звеньями предыдущих рядов.Отношение числа зубьев планетарных шестерен каждого дифференциала равно отношению числа сновальных валиков, кинематически связанных с каждой из них. I . На фиг. 1 схематично изображена предлагаемая стойка для сновальных валиков и технологическая схема заправки нитей; на фиг. 2 - то же, вид сверху; на фиг. 3 - планетарнь1й дифференциал, вид спереди; на фиг. 4 - планетарный дифференциал, разрез А-А на фиг. 3; на фиг. 5 а-ж - схемы кинематического соединения планетарных дифференциалов для разного количества сновальных в ликов. Стойка для сновальных валиков шлихтовальной машины содержит раму 1, с обеих сторон которой для каждого сновального валика 2 установлены роликовы подшипники 3, а напротив них с одной CT стороны в подшипниках 4 смонтированы соединительные муфты 5, имеющие одина ковые, жестко закрепленные зубчатые звездочки 6, и болты 7 для крепления , шипов сновальных валиков. В процессе сматывания сновальные валики вращаютс со своими муфтами как единое целое. Стойка для сновальных валиков включает в себя планетарные дифференциалы 8, смонтированные в подшипниках 9. ни раме 1 между валиками 2 со стороны соединительных муфт 5, а также направляющие валики 10. для основы, установленные с возможностью вращения под действием натяжения нитей 11 в шарико вых подшипниках 12, расположенных на раме 1 с двух ее сторон. Планетарный дифференциал 8 размещен в корпусе 13, составляющем одно целое с зубчатой звездочкой 14. На осях укрепленных в корпусе механизма с возможностью вращенка, расположена пара сателлитных шестерен 15, которые находятся в сцеплении с другой парой са теллитных шестерен 16. Шестерни 15 . входят в зацепление с планетарной шеотерней 17, которая укреплена, в подшипяв ке корпуса на общей втулке с зубчатой звездочкой 18. Пара сателлитных шестерен 16 находится в сцеплении с другой планетарной шестерней 19, заврепленной на валике 2О, установленном в подшипн ке корпуса, и свободно прохошпцем внут ри втулки шестерни 17. На другом кошхе 9 77 валика 20 жестко Ьакреплена зубчатая звездочка 21, еуюгааковая с зубчатыми звездочками 14 и 18. Для уменьшения влияния сил трения на натяжение нитей все подшипники вращающихся шестерен планетарного дифференциала вьшолнены в виде шариковых подшипников. Все сновальные валики и планетарные дифференциалы предлагаемой йшихгойальной стойки в зависимости от количества валиков кинематически связаны между собой следующим образом. При двух сновальных валиках (фиг. Sgd зубчатые звездочки 6 соединительных муфт 5 сновальных валиков соединены цепями 22 и 23 с зубчатыми звездочками le и 21 планетарного дифференциала 8. Такие элементы попарного кинемаФического соединения сновальных валиков ia стойке шлихтовальной машины имеют место и при большем числе валиков (фиг. 5 б-ж). Входящие в эти пары планетарные дифференциалы 8 вместе с цепями 22 и 23, звездочками 6, 18 и 21 представляют собой первый ряд планетарньТх дифференциалов. Планетарные дифференциалы первого ряда (фиг. 2 и 5) обозначены . При трех сновальных валиках (фиг. 56) зубчатая звездочка 14 планетарного дифференциала 8 первого ряда цепью 24 соединена с зубчатой звездочкой 18 другого планетарного дифференциала 8, звездочка 21 которого, в свою очередь, соединена с цепью 25 с зубчатой звездочкой 6 соединительной муфты последнего (дальнего от тянульного вала) сновального валика. Второй планетарный дифференциал 8 здесь входит во второй ряд кинематической связи сновальных валиков и поэтому на чертеже обозначен W . При четырех сновальных валиках (фиг. 1, 2 и 5-в) зубчатые звездочки 4 14 планетарных дифференциалов 8 первого ряда йепями 24 к 26 соединены зубчатьнли звездочками 18 и 21 планетарного дифференциала 8, образующегоД ряд кинематической связи сновальных валиков. При пяти сновальных валиках (фиг. 5-г) первые четыре из них кинематически связаны по .предыдущей схеме (фиг. 5-в). Зубчатая авеадочка 14 планетарного дв ференциала 8 it ряда дополнительно соединена здесь цецыо 27 с зубчатой звеэдочкой 18 планетарного дифференциала, 8 оосдедующего ряда, зубчатая звездочка 21 которого цепью 28 соединена с зубчатой звездочкой 6, соединенной му4 ты последнего сновального валика. Планетарный дифференциал 8, обозначенный И I образует третий ряд кинематической связи сновальных валиков. При шести сновальных валиках (фиг. 5-д) первые четыре из них кинематически соединены по схеме, показанной на фиг. 5-в, а два оставшихся - по схеме, показанной на фиг. 5-а. При этом зубчатая звездочка 14 планетарного дифференциала 8 |1 ряДа соединена цепью 27 с зубчатой звездочкой 18 планетарного дифференциала 8 П1 ряща, зубчатая звездочка 21 которого, в свою очередь, соединена цепью 29 с зубчатой звездочкой 14 планетарного дифференциала 8 I ряда, объединяющего последнюю пару сновальных ваЛиков, При семи сновальных валиках (фиг, 5первые четыре из них также кинематичес ки связаны по схеМ:е,. показанной на фиг. 5-в, а три оставшихся - по схеме, показанной на фиг. 5-6. Зубчатая авездоч ка 14 планетарного дифференциала 8JJ ряда, объединяющего четыре сновальных валика, дополнительно соединена здесь цепью 27 с зубчатой звездочкой 18 планетраного дифференциала 8Ш ряда. Зубчатая звездочка 21 этого Дифференциала, в свою очередь, соединена цепью ЗО с зубчатой звездочкой 14 планетарного дифференциала 8 И ряда, объединяюш;его три сновальных валика. При восьми сновалььшхх валиках (фиг, 5-ж) кинематическое соединение их дважды повторяет кинематическую схему для четырех сноЬальных валинов, показанную на фиг. 5-в, При этом зубча тые звездочки 14 планетарных дифференциалов 80 ряда цепями 27 и 31 соединены соответственно с зубчатыми звеэдочками 18 и 21 планетарного дифферен циала 8, образующего П| ряд кинематической связи сновальных валиков. Путем объединения любых двух кинематических схем (фиг, 5-а-ж) через дополнительный планетарный дифференциад можно получить итоговую схему для любого другого, встречающегося в практике количества сновальных валиков, Чис1VC ГХД n JDCkflOnDl. IDClrfUlIVWD, 4. по дифференциальных механизмов в кинематической схеме на единицу меньше числа сновальных Валиков на стойке шли товальноЗ машины. Таким образом, средство управления муфтами представляет собой установленные рядами один за другим планетар ные Д11фферещ(иах1ы, корпус каяздого из которых смовтирован между соединительными муфтами свободно на раме При этом каждая пЛанетарная шестерня планетарного дифференциала последуюшего рада кинематически связана с двумя соседними ведомыми звеньями предьщущих радов. Такими ведомыми звеньями являются корпуса планетарных дифференциалов и соединительные муфты сновальных валиков. Планетарные дифференциалы вьшолнены так, что отношение числа зубьев планетарной шестерни 17 к числу зубьев планетарной шестерни 19 равно отношению количества сновальных валиков, кинематически связанных с зубчатой звездочкой 18, к количеству сновальных валиков, кинематически связанных с зубчатой звездочкой 21. Так, например, в случаетрех сновальных валиков на стойке шлихтовальной машины (фиг, 5-6) у планетарного дифференциала и ряда это отноше- ние равно 2:1, при пяти сновальных валиках (фиг. 5-г) у планетарного дифференциала 1П ряда - 4:1, у планетарного дифференциала ряда при шести валиках (фиг, 5-д) - 4:2, у планетарных дифференциалов Т ряда 1:1 и т.п. Указанная попарная кинематическая связь сновальных валиков и дифференциальных механизмов имеет в последнем ряду один дифференциальный механизм. При сматывании нитей со сновальных валиков к корпусу конечного планетарного дифференциала приложен тормозной момент, создаваемый тормозной лентой, тормозным диском или другими известными техническими средствагми. Место приложения тормозного момента на чертежах (фиг, 2 и 5 а-ж) показано стрелкой. Дифференциальные механизмы вьшолне- ны съемными. При необходимости, в соответствии с кинематической схемой для заданного количества сновальных валиков, любой планетарный дифференциал может быть заменен другим с нужным отношением числа зубьев планетарных шестерен. Для обеспечения безопасного обслуживания все вращающиеся зубчатые звездочки и цепи имеют ограждения (не показаны). Перед установкой сновальных валиков на стойку шлихтовальной машины производится настройка кинематической схемы с дифференциальными механизмами на заданное количество валиков в шлихтовальной партии. Заправка сновальных валиков 2 осуществляется при разъединенных соединительных муфтах 5 (болты 7 вывернуты)v В этом заправочном режиме сновальные валики 2, удерживаемые в подшипниках 3, своими вшпами не касаются соедишьтельных муфт 5 и поэтому имеют воэ- 5 можность вращаться при отключенной от них кинематической связи. Шлихтовальщик объединяет группы нитей 11 с каждого сновального валика в одну основу в соответствии с технологической схемой О заправки. Перед пуском щлихтовальной машины, после привязывания нитей 11 новой основы к доработанной основе, все сновальные валики 2 прикрепляются к соединительным муфтам 5 болтами 7, 5 и , тем самым оказываются кинематически связанными между собой через планетарные дифференциалы.
Принцип работы стойки для сновальных валиков заключается в следующем.20
Нити 11 (фиг. 1 и 2), сматываемые со сновальных валиков 2, вращают частично огибаемые направляющие валики 10 и поступают через тянульный вал (не показанный) в последующие зоны25
щлихтовальной мащины. Вращательное движение сновальных валиков 2 через звездочки 6 соединительных муфт 5, цепями 22 и 23 передается зубчатым звездочкам 18 и 21 планетарных дифферен- ЗО циалов 8 первого ряда кинематической связи с равным числом зубьев планетарных шестерен 17 и 19.
Поскольку сновальные валики 2 при 35 сматьюании нитей 11 вращаются в одном направлении, абсолютное вращение планетарных шестерен 17 и 19, свянзанных с зубчатыми звездочками 18 и 1, по направлению также будет совпа 40 ать. При равенстве вращающих моментов от натяжения нитей двух валиков, кинематически соединенных с данным дифференциалом 8 (фиг. 3 и 4), планеарные щестерни 17 и 19 вращаются45 вместе с корпусом 13 этого дифференциала, как единое целое, так как сателитные щестерни 15 и 16 относительно корпуса 13 неподвижны. В этом случае один оборот корпуса 13 планетарногоJQ ифференциала 8 соответствует одному обороту планетарных шестерен 17 и 19. гловые скорости рассматриваемой пары сновальных валиков буДут одинаковы, а . вращающий момент, приложенный к кор- „ пусу 13, равен сумме вращающих моментов каждого из двух сновальных , т.е. удвоенному вращающему моменту одного из них.
Если по какой-нибудь причине вращающие моменты от натяжения нитей двух сновальных валиков, кинематически связанных с планетарными дифференциалом .первого ряда, разные (например, при разных диаметрах намотки), то сателлитные щестерни 15 и 16, обкатываясь вокруг планетарных шестерен 17 и 19 вращаются относительно своих осей, в результате чего сновальные валики относительно друг друга поворачиваются в противоположных направлениях до тех пор, пока вращакшше моменты не будут выравнены. При этом, в течение времени относительного вращения сателлитных шестерен 15 и 16, сновальный валет:-с с большим диаметром намотки имеет меньшую абсолютную угловую скорость вращения по сравненшо с другим сновальным валиком, у которого меньше диаметр намотки нитей. Таким образом, планетарный дифференциал 8 первого ряда кинематической свззи автоматически уравновешивает моменты сил натяженид нитей, сматывемых с двух, кинематичео ки связанных с ним, сновальных валиков.
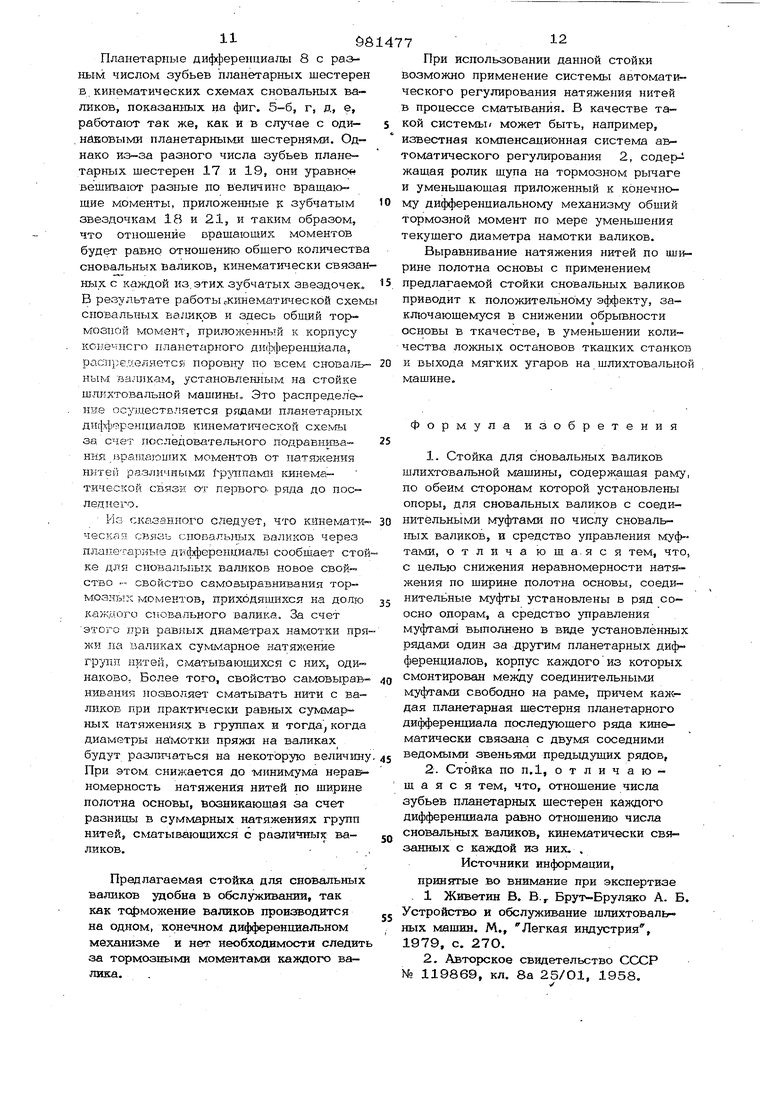
Совпадающее по направлению вращательное движение корпусов 13 двух плантарных дифференциалов 8 первого psuta кинематической связи сновальных валнко зубчатыми звездочками. 14, nensiMH 24 и 26 передается зубчатым звездочкам 18 и 21 планетарного дифференциала 8 1| ряда кинематической связи {фиг. 1 и 2). В последнем дифференциале, аналогично предшествующему случаю, происходит самовыравнивание вращающих моментов, приложенных к корпусам 13 планетарных дифференциалов 8 1: ряда кинематической связи. Поворот этих корпусов относительно друг друга, происходящий в процессе выравнивания вращающих моментов в противоположных направлениях, передается кинематически связанным с ними попарно сновальным валиком 2. Каждая пара сновальных валиков как единое целое поворачивается относительно друг друга также в противоположных направлениях до тех пор, пока суммарные вращательные моменты каждой из | двух пар не станут равными. В итоге оба ряда планетарных дифференоиалов обеспечат равное распределение между сновальными валиками общего тормозноj момента, приложенного к корпусу конечного планетарного дифференциала (фиг. 1 н 2). 110 Планетарные диф({)еренциалы 8 с раз-ным. числом зубьев планетарных шестерен в кинематических схемах сновальных валиков, показанных на фиг. 5-6, г, д, е, работают так же, как и в случае с оди, каковыми планетарными шестернями. Однако из-за разного числа зубьев планетарных шестерен 17 и 19, они уравно вешивают разные по величино вращающие моменты, приложе1шые р зубчатым звездочкам 18 и 21, и таким образом, что отношение врашаюших моментов будет равно отношению общего количеств сновальных валиков, кинематически связан ных с каждой из, этих зубчатых звездочек. В рез7ультате работы скинематич ее кой схем сновальных ва.шков и здесь общий тормозной момент, приложенный к корпусу конечного планетарного дифференциала, распределяется норови:;/- по всем сноваль ным валикам, установленным на стойке шлихтовальной машиньь Это распределение осуществляется планетарных дифференциалов кинематической схемы за счет последовательного подравнивання вращающих моментов от натткения нитей различными rpjTinaMii юшема- тической связи от первого, ряда до последнего. Из сказанного следует, что кинемати ческая связь сп.овальных валиков через пла тетарз-;ые ди(Ьференциа.лы сообщает сто ке для сновальных валиков новое свой ство - свойство самовыравнивания тормозньпг. моментов, приходящихся на долю каждого сновального валика. За счет этого при равных диаметрах намотки пр жи па валиках суммарное натяжение групп нитей, с 4атывающихся с них, одинаково. Более того, свойство самовырав нивания позволяет сматывать нити с валиков при практкчес1Ш равных суммарных натяжени1(х в группах и тогда, когда диаметры намотки пряжи на валиках будут разл.1маться на некоторую величин При этом снижается до минимума нерав номерность натяжения нитей по ширине полотна основы, возникающая за счет разницы в суммарных натяжениях групп нитей, сматывающихся с различных валиков. Предлагаемая С1чэйка для сновальных валиков удобна в обслуживании, так как тфможение валиков производится на одном, конечном дифференциальном механизме и нет необходимости следит за тормозными моментами каждого валика. 7 При использовании данной стойки озможно применение системы автоматического регулирования натяжения нитей процессе сматывания. В качестве такой системы может быть, например, известная компенсационная система авоматического регулирования 2, содержащая ролик щупа на тормозном рычаге и уменьшающая приложенный к конечному дифференциальному механизму общий тормозной момент по мере уменьщения текущего диаметра намотки валиков. Выравнивание натяжения нитей по ширине полотна основы с применением предлагаемой стойки сновальных валиков приводит к положительному эффекту, заключающемуся в снижении обрьюности основы в ткачестве, в уменьшении количества ложных остановов ткацких станков и выхода мягких угаров на шлихтовальной машине. Формула изобретения 1.Стойка для сновальных валиков шлихтовальной машины, содержащая раму, по обеим сторонам которой установлены опоры, для сновальных валиков с соединительными муфтами по числу сновальных валиков, в средство управления муфтами, отлича юща.яся тем, что, с целью снижения неравномерности натяжения по ширине полотна основы, соединительные муфты установлены в ряд соосно опорам, а средство управления муфтами выполнено в виде установленных рядами один за другим планетарных дифференциалов, корпус каждого из которых смонтирован меяоду соединительными муфтами свободно на раме, причем каждая планетарная шестерня планетарного дифференциала последующего ряиа кинематически связана с двумя соседними ведомыми звеньями предьщущих рядов, 2.Стойка по П.1, отличающаяся тем, что, отношение числа зубьев планетарных шестерен каждого дифференциала равно отношению числа сновальных валиков, кинематически связанных с каждой из них. , Источники информации, принятые во внимание при экспертизе , 1 Живетин В. В. г Брут-Бруляко А. Б. Устройство и обслуживание шлихтовальных машин. М., Легкая индустрия, 1979, с. 27О. 2. Авторское свидетельство СССР № 119869, кл. За 25/О1, 1958.
13 ; 981477i-
№ 318415, кл. В 05 С 3/12, 197О.6 .Авторское свидетельство
fftl tf
ell// /,
А-А
17
Фиг.
