(54) ЗАХВАТ
| название | год | авторы | номер документа |
|---|---|---|---|
| Захват промышленного робота | 1985 |
|
SU1324845A1 |
| Очувствленное захватное устройство | 1989 |
|
SU1743857A1 |
| Очувствленное захватное устройство | 1989 |
|
SU1743858A1 |
| ЭЛЕКТРОМАГНИТНЫЙ ПРИВОД С ДВУМЯ УСТОЙЧИВЫМИ СОСТОЯНИЯМИ ДЛЯ СРЕДНЕВОЛЬТНОГО АВТОМАТИЧЕСКОГО ВЫКЛЮЧАТЕЛЯ | 2010 |
|
RU2540114C2 |
| СПОСОБ РЕГУЛИРОВАНИЯ РАСХОДА ЖИДКОЙ СРЕДЫ И МАГНИТОРЕОЛОГИЧЕСКОЕ УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2343533C1 |
| Электромагнитное захватное устройство | 1979 |
|
SU935428A1 |
| Губка схвата | 1990 |
|
SU1815212A1 |
| Схват манипулятора В.Г.Вохмянина | 1990 |
|
SU1764992A1 |
| Очувствленный захват манипулятора | 1985 |
|
SU1247268A1 |
| Захват | 1989 |
|
SU1646861A2 |
, Изрбретение относится к мащиностроению, в частности к робототехнике, и может быть использовано в качестве захвата в различных устройствах, в том числе и малогаба:ритных, предназначенных для манипули. ровауия изделияь|ш, преимущественно из ферромагнитных материалов.
Известен захват, содержащий корпус, установленную в нем катушку . индуктивности, и захватные губки 13. Указанный захват обладает небольшим усилием зажима деталей и большими габаритами, значительно превосходящими габариты захватываемой детали.
Цель изобретения - повышение усилия зажима захвйта путем создания замкнутого магнитного потока и повышение его компактности.
Поставленная цель достигается тем, что захват снабжен ферромагнитными сердечниками, расположёнными в катушке индуктивности и связанными с захватными Убками, также выполненными из ферромагнитного мат риала.
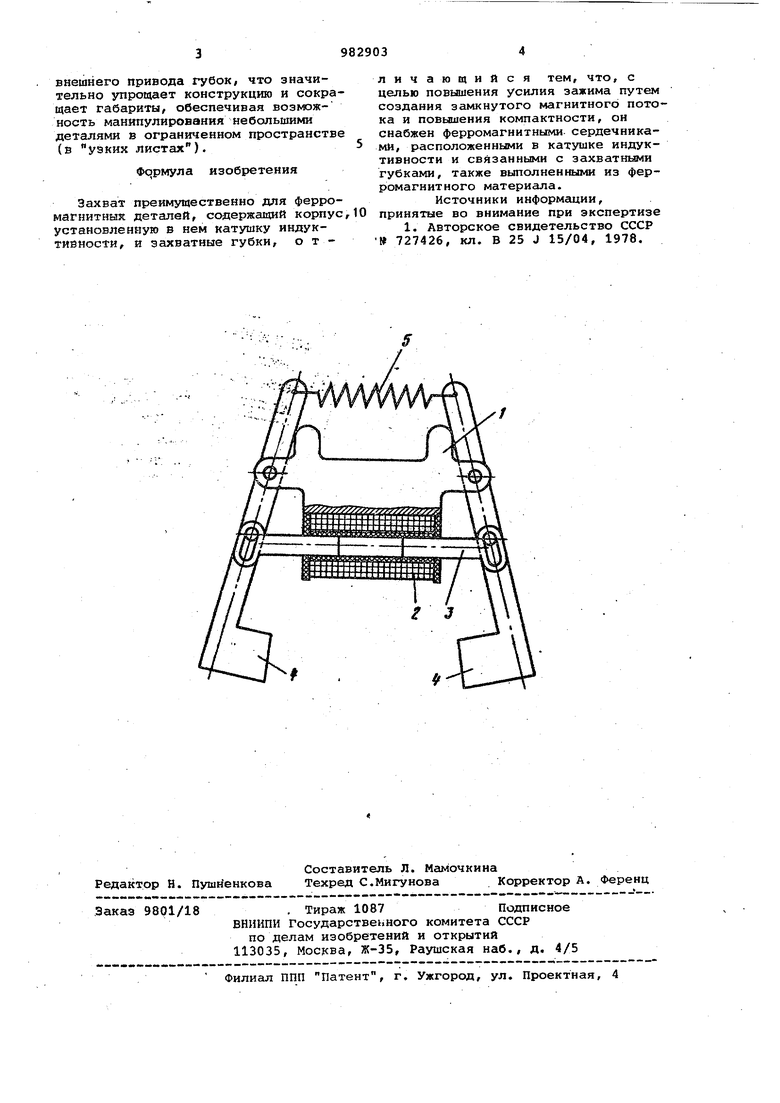
На чертеже изображен предлагаемый захват, общий вид.
Захват состоит из немагнитного корпуса 1, в котором установлена катушка 2 индуктивности с размещенными в ней ферромагнитными сердечниками 3, соединенными с захватными губками 4, выполненными в виде, коромысел, устан овленных на. осях в корпусе 1 и стянутыми пружиной 5,
Захват работает следуквдим обра10зом.
При подаче на катушку 2 индуктивности постоянного напряжения происходит втягивание сердечников 3,которые смыкают губки 4. При захвате
15 детали из ферромагнитного материала образуется замкнутый магнитный поток, проходящий через сердечники 3, губки 4 и деталь, что повышает усилие захвата. При отключении питающе20го напряжения пружина 5 возвращает губки Н сердечники в исходное положение. Для предотвращения нарастания остаточной намагниченности на сердечниках 3 и губках 4 при пЬследукмдём
25 включении захвата полярность включения катушки 2 индуктивности меняется на противоположную.
Таким образом, благодаря особенностям выполнения магнитно-клещевоР
30 захват позволяет отказаться от .
внешнего привода губок, что значительно упрощает конструкцию и сокращает габариты, обеспечивая возможность манипулирования небольшими деталями в ограниченном пространстве (в узких листах).
Формула изобретения
Захват преимущественно для ферромагнитныя деталей, содержащий корпус установленную в нем катушку индуктийности, и захватные губки, отличающийся тем, что, с целью повьииения усилия зажима путем создания замкнутого магнитного потока и повышения компактности, он снабжен ферромагнитными сердечниками, расположенными в катушке индуктивности и связанными с захватными губками, также выполненными из ферромагнитного материала.
Источники информации, принятые во внимание при экспертизе
