Изобретение относится к машиностроению и может быть использовано в промышленных роботах, предназначенных, например, для сборки узлов из деталей.
Целью изобретения является расширение функциональных возможностей захвата манипулятора за счет обеспечения определения материала захватываемой детали.
На чертеже показана схема устройства.
Очувствленный захват манипулятора имеет захватные губки 1, соединенные с при- водом 2 перемещения губок. С одной из губок соединен разомкнутый ферромагнитный магнитопровод 3, выполненный из ферромагнитного материала с малыми потерями на вихревые токи (например, из магнитоди- электрика или феррита) и несущий катущ- ку индуктивности 4. Торцы магнитопровода расположены в плоскости рабочей поверхности губки, что обеспечивает замыкание магнитного потока магнитопровода через материал захваченной детали 5.
Катушка индуктивности 4 соединена с входом порогового преобразователя 6, являющегося частью системы управления. Пороговый преобразователь 6 может быть выполнен, нагтример, в виде последовательного соединения мостовой схемы, образуемой ин- дуктивностью .катушки 4, компенсационной катушкой индуктивности LK и полными сопротивлениями Z и питаемой от генератора Г переменным током, фазочувствитель- ного детектора Фц и порогового усилителя ПУ.
Очувствленный захват манипулятора работает следующим образом.
В процессе захвата детали 5 захватные губки 1 с помощью привода 2 сводятся и осуществляется зажим детали 5. При этом торцы магнитопровода 3 приближ-аются к по- верхности захваченной детали и магнитный поток магнитопровода пронизывает тело детали. Величина этого магнитного потока и, следовательно, полное сопротивление катушки 4 зависят от материала детали.
Если изменением компенсационной индуктивности сбалансировать мостовую схему при отсутствии в захвате детали и затем поместить в захват деталь из неферромагнит5
0
5 0
0
ного неэлектропроводного материала (пластмассы), то балансировка моста практически не нарущается. Если в захват поместить ферромагнитную деталь, то на выходе моста появится напряжение разбаланса с положительным фазовым сдвигом, если в захвате неферромагнитная электропроводная деталь, то выходное напряжение моста имеет отрицательный фазовый сдвиг.
Фазочувствительный детектор преобразует выходное напряжение моста в положительное или отрицательное выпрямленное напряжение. Это напряжение усиливается пороговым усилителем, порог которого выбирается большим, чем возможное напряжение помехи на выходе моста, и коэффициент усиления велик.
Пороговый преобразователь имеет характеристику, близкую к релейной характеристике с зоной нечувствительности.
При захвате детали в зависимости от ее материала на выходе порогового преобразователя возможно одно из трех состояний: максимальное положительное напряжение при захвате ферромагнитной детали, максимальное отрицательное напряжение при захвате неферромагнитной электропроводной детали, нулевое напряжение при захвате неферромагнитной, неэлектропроводной детали. Эти сигналы можно использовать для управления исполнительными устройствами.
Данное техническое решение позволяет автоматически в процессе захвата и транспортировки промыщленным роботом детали получать сигнал о характере ее материала: ферромагнитная деталь (например, стальная), электропроводная неферромагнитная деталь (например, из цветных металлов и их сплавов), неферромагнитная, неэлектропроводная деталь, (например, пластмассовая) .
Функциональные возможности промышленного робота расширяются и он может выполнять функции рассортировки деталей из разных материалов, что сокращает общую потребность в технических средствах роботизированного технологического комплекса и снижает его стоимость.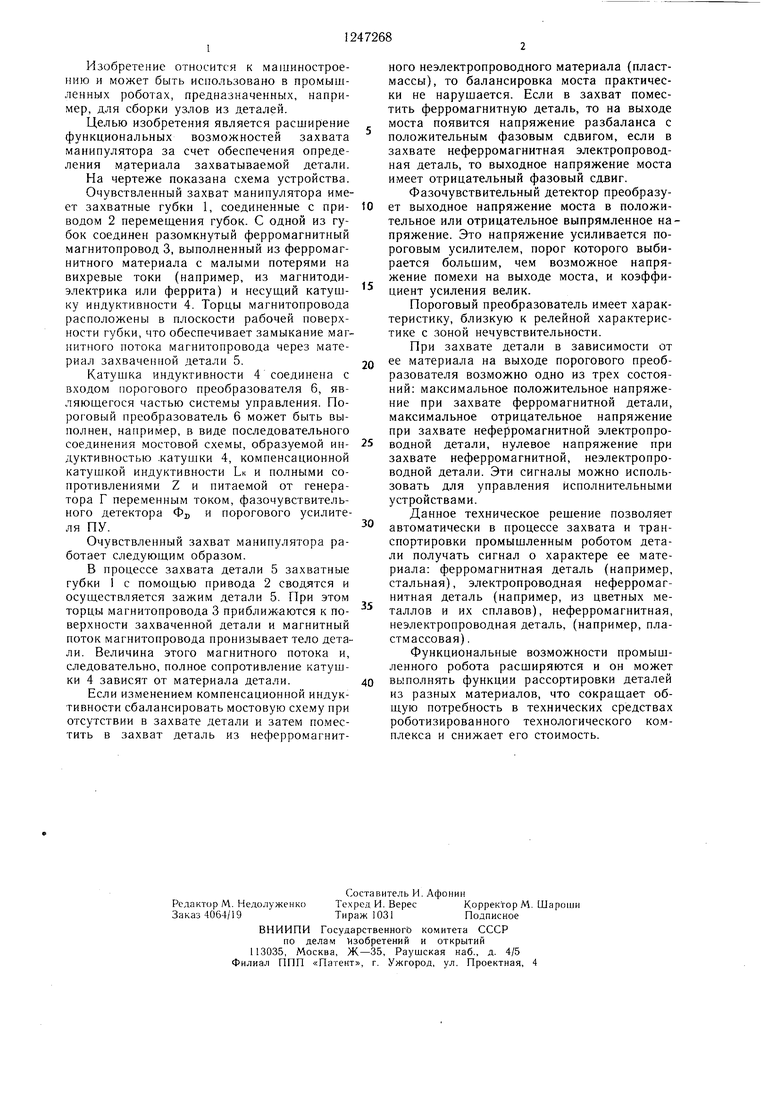
| название | год | авторы | номер документа |
|---|---|---|---|
| Очувствленное захватное устройство | 1989 |
|
SU1743857A1 |
| Очувствленное захватное устройство | 1989 |
|
SU1743858A1 |
| Очувствленный захват манипулятора | 1989 |
|
SU1743852A1 |
| Схват манипулятора | 1987 |
|
SU1511116A1 |
| Губка схвата | 1990 |
|
SU1815212A1 |
| Захват промышленного робота | 1985 |
|
SU1324845A1 |
| Схват промышленного робота | 1985 |
|
SU1328191A1 |
| Губка схвата манипулятора | 1990 |
|
SU1805032A1 |
| Схват | 1984 |
|
SU1178585A1 |
| Устройство для определения концентрации металлических примесей в смазочных маслах механизмов | 1981 |
|
SU987471A1 |

| Очувствленный захват манипулятора | 1979 |
|
SU831612A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
