Изобретение относится к робототехнике и предназначено для использования в промышленных роботах для манипулирования изделиями преимущественно из ферромагнитных материалов.
Известно устройство, содержащее корпус с установленными на нем захватными рычагами, привод их перемещения, состоящий из катушки индуктивности, установлен- ной на корпусе между рычагами, и сердечников, шарнирно закрепленных на каждом из захватных рычагов, винтовую пружину и тензодатчик, расположенные в зазоре между сердечниками внутри катушки индуктивности, причем захватные рычаги, сердечники и пружина выполнены из ферромагнитного материала.
Недостатками данного устройства являются ограниченные технологические возможности, сложность конструкции и низкая точность измерения размера захваченной детали.
Ограниченность технологических возможностей устройства обусловлена наличием внутри катушки индуктивности, помимо винтовых пружин, магнитоупругого трансформаторного тензодатчика, состоящего из магнитопровода и электрических обмоток и ограничивающего диапазон хода (перемещения) ферромагнитных сердечников, а следовательно, и захватных рычагов, приводящих к уменьшению номенклатуры подлежащих захвату (и измерению размеров) деталей, по типоразмеру.
Сложность конструкции известного устройства обусловлена наличием двух винтовых пружин и сложностью тензодатчика, выполненного магнитоупругим в виде трансформатора.
Низкая точность измерения размера захваченной детали известным устройством обусловлена прежде всего тем, что тензодатчик выполнен на основе металлизированной резины, обладающей значительной относительной погрешностью (до 30%) и гисо
С
vj
Јь
СА) 00 СП 00
стерезисом (до 30%), что ограничивает область ее применения только в качестве релейного элемента. Кроме того, наличие в устройстве 2-х винтовых пружин (вместо одной единственной) тоже может привести к дополнительным погрешностям измерений.
Целью изобретения является расширение технологических возможностей, упрощение конструкции и повышение точности измерения размера захваченной детали.
Поставленная цель достигается тем, что в очувствленном захватном устройстве, содержащем корпус с установленными на нем захватными рычагами, привод их перемещения, состоящий из катушки индуктивности, установленной на корпусе между рычагами, и сердечников, шарнирно закрепленных на каждом из захватных рычагов, винтовую пружину и тензодатчик, расположенные в зазоре между сердечниками внутри катушки индуктивности, причем захватные рычаги, сердечники и пружина выполнены из ферромагнитного материала, пружина выполнена с плоскопрямоугольным поперечным сечением витков, а тензодатчик расположен на одном из витков пружины.
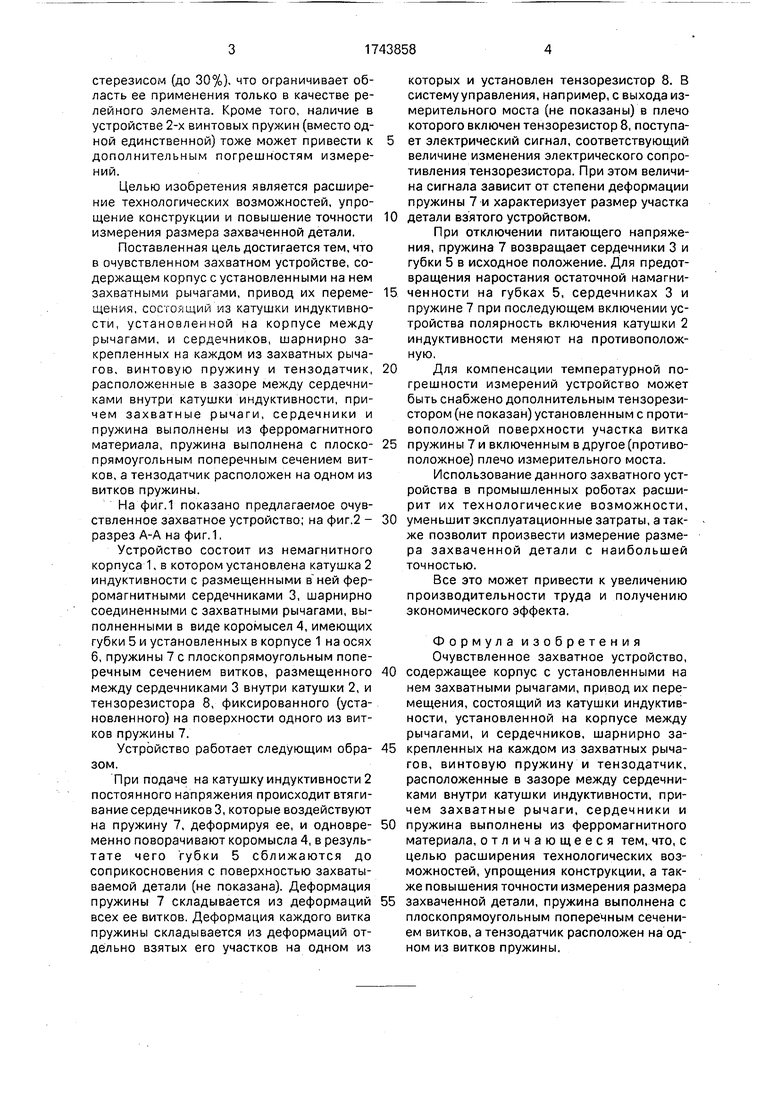
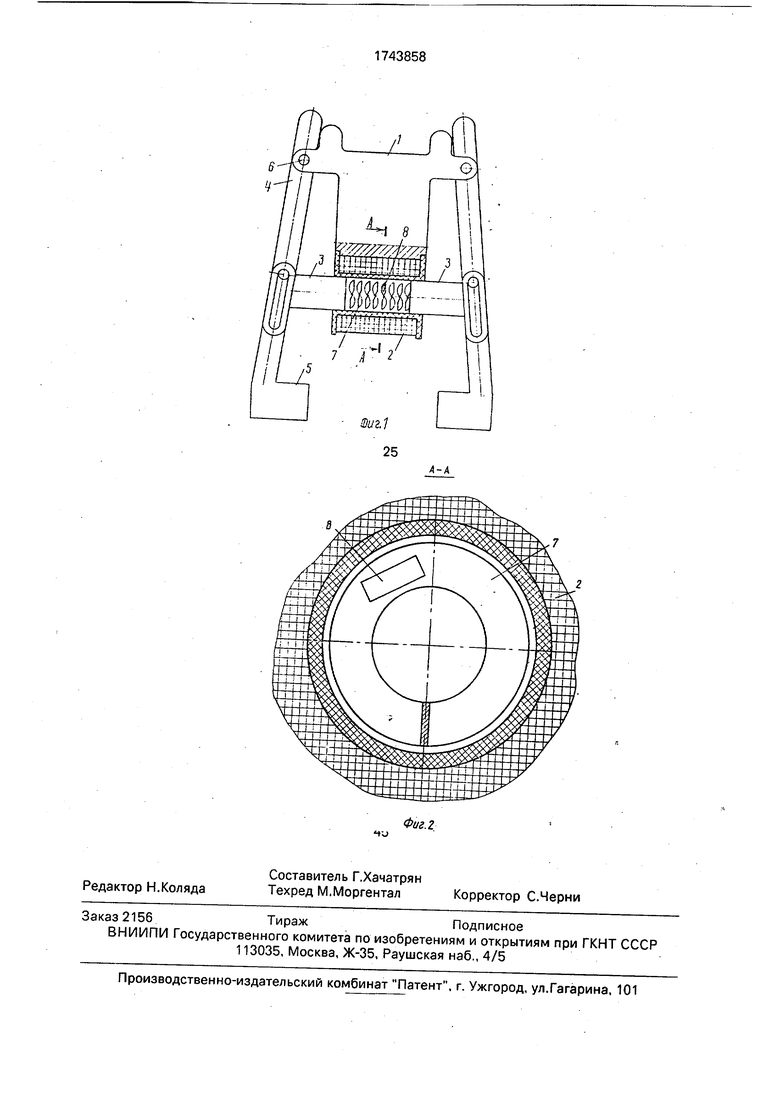
На фиг.1 показано предлагаемое очув- ствленное захватное устройство; на фиг.2 - разрез А-А на фиг.1,
Устройство состоит из немагнитного корпуса 1, в котором установлена катушка 2 индуктивности с размещенными ферромагнитными сердечниками 3, шарнирно соединенными с захватными рычагами, выполненными в виде коромысел 4, имеющих губки 5 и установленных в корпусе 1 на осях 6, пружины 7 с плоскопрямоугольным поперечным сечением витков, размещенного между сердечниками 3 внутри катушки 2, и тензорезистора 8, фиксированного (установленного) на поверхности одного из витков пружины 7.
Устройство работает следующим образом.
При подаче на катушку индуктивности 2 постоянного напряжения происходит втягивание сердечников 3, которые воздействуют на пружину 7, деформируя ее, и одновременно поворачивают коромысла 4, в результате чего губки 5 сближаются до соприкосновения с поверхностью захватываемой детали (не показана). Деформация пружины 7 складывается из деформаций всех ее витков. Деформация каждого витка пружины складывается из деформаций отдельно взятых его участков на одном из
которых и установлен тензорезистор 8. В системууправления, например, с выхода измерительного моста (не показаны) в плечо которого включен тензорезистор 8, поступа- 5 ет электрический сигнал, соответствующий величине изменения электрического сопротивления тензорезистора. При этом величина сигнала зависит от степени деформации пружины 7 и характеризует размер участка
0 детали взятого устройством.
При отключении питающего напряжения, пружина 7 возвращает сердечники 3 и губки 5 в исходное положение. Для предотвращения наростания остаточной намагни5 ченности на губках 5, сердечниках 3 и пружине 7 при последующем включении устройства полярность включения катушки 2 индуктивности меняют на противоположную.
0 Для компенсации температурной погрешности измерений устройство может быть снабжено дополнительным тензорези- стором (не показан) установленным с противоположной поверхности участка витка
5 пружины 7 и включенным в другое (противоположное) плечо измерительного моста.
Использование данного захватного устройства в промышленных роботах расширит их технологические возможности,
0 уменьшит эксплуатационные затраты, а также позволит произвести измерение размера захваченной детали с наибольшей точностью.
Все это может привести к увеличению производительности труда и получению экономического эффекта.
Формула изобретения Очувствленное захватное устройство,
0 содержащее корпус с установленными на нем захватными рычагами, привод их перемещения, состоящий из катушки индуктивности, установленной на корпусе между рычагами, и сердечников, шарнирно за5 крепленных на каждом из захватных рычагов, винтовую пружину и тензодатчик, расположенные в зазоре между сердечниками внутри катушки индуктивности, причем захватные рычаги, сердечники и
0 пружина выполнены из ферромагнитного материала, отличающееся тем, что, с целью расширения технологических возможностей, упрощения конструкции, а также повышения точности измерения размера
5 захваченной детали, пружина выполнена с плоскопрямоугольным поперечным сечением витков, а тензодатчик расположен на одном из витков пружины.
J 77
| название | год | авторы | номер документа |
|---|---|---|---|
| Очувствленное захватное устройство | 1989 |
|
SU1743857A1 |
| Захват промышленного робота | 1985 |
|
SU1324845A1 |
| Захватное устройство | 1990 |
|
SU1768383A2 |
| Очувствленный захват манипулятора | 1989 |
|
SU1743852A1 |
| Очувствленный схват манипулятора | 1985 |
|
SU1309450A1 |
| ДАТЧИК ДЛЯ СИЛОМОМЕНТНОГО ОЧУВСТВЛЕНИЯ РОБОТОВ | 2006 |
|
RU2306536C1 |
| Схват промышленного робота В.Г.Вохмянина | 1990 |
|
SU1756144A1 |
| Схват манипулятора В.Г.Вохмянина | 1990 |
|
SU1764992A1 |
| Очувствленный схват | 1985 |
|
SU1294602A1 |
| Очувствленный захват манипулятора | 1985 |
|
SU1247268A1 |
Использование: машиностроение, в захватных органах промышленных роботов. Сущность изобретения: устройство содержит корпус 1 с захватными рычагами 4, привод их перемещения, винтовую пружину 7 и тензодатчик 8. Привод перемещения выпол нен в виде катушки индуктивности 2 и шарнирно закрепленных на рычагах сердечников 3. Винтовая пружина и тензодатчик расположены в зазоре между сердечниками внутри катушки индуктивности. Захватные рычаги, сердечники и пружина выполнены из ферромагнитного материала. Тензодатчик расположен на одном из витков пружины, выполненных с плоскопрямоугольным поперечным сечением. При подаче питания на катушку индуктивности сердечники втягиваются внутрь катушки и сжимают пружину, Величина сигнала с тензодатчика зависит от степени деформации пружины и характеризует размер захватываемой детали. 2 ил.
Ш1 25
| Захват промышленного робота | 1985 |
|
SU1324845A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
