Изобретение относится к подъег нотранспортному оборудовашш, а имение, к стеллажным кранам-в табелере1м, овоЧ, рудованным телескопическими захвата1иИ
Известен телескопический захват, содержащий неподвижиое основание, на котором установлены выццвижнью платфорглы, соединенные 1лежду собой посредством трособлочной системы, и привод выдвижения платф фм, вьсполненный с блоками шестерен разного диаглетра С15.
Недостаток известного устройства заключается в сложности конструкции и его низкой надежности.
Цель изобретения - упрощение конструкции и повькиение эксплуатационной надежности захва1та.
Достигается зто тем, что приводя содержит механизм .перемещения блоков шестерен, выполненный в виде пары винт-гайка, при зтом гайка механизма перемещения снабжена с двух сторон полуосями и установлена с возможностью перемещения в горизонтальной плоскости, а блоки шестерен, установлены на полуосях.
При зтом на основании захвата установлены направляющие для перемёщающшгся полуосей.
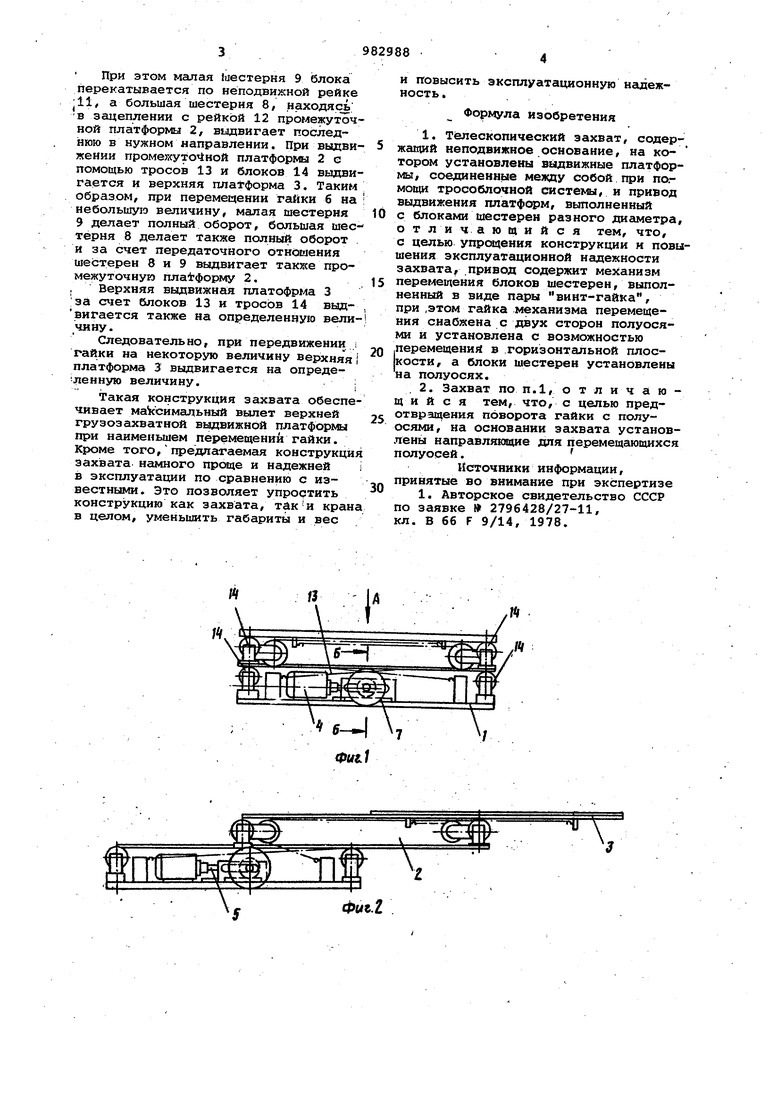
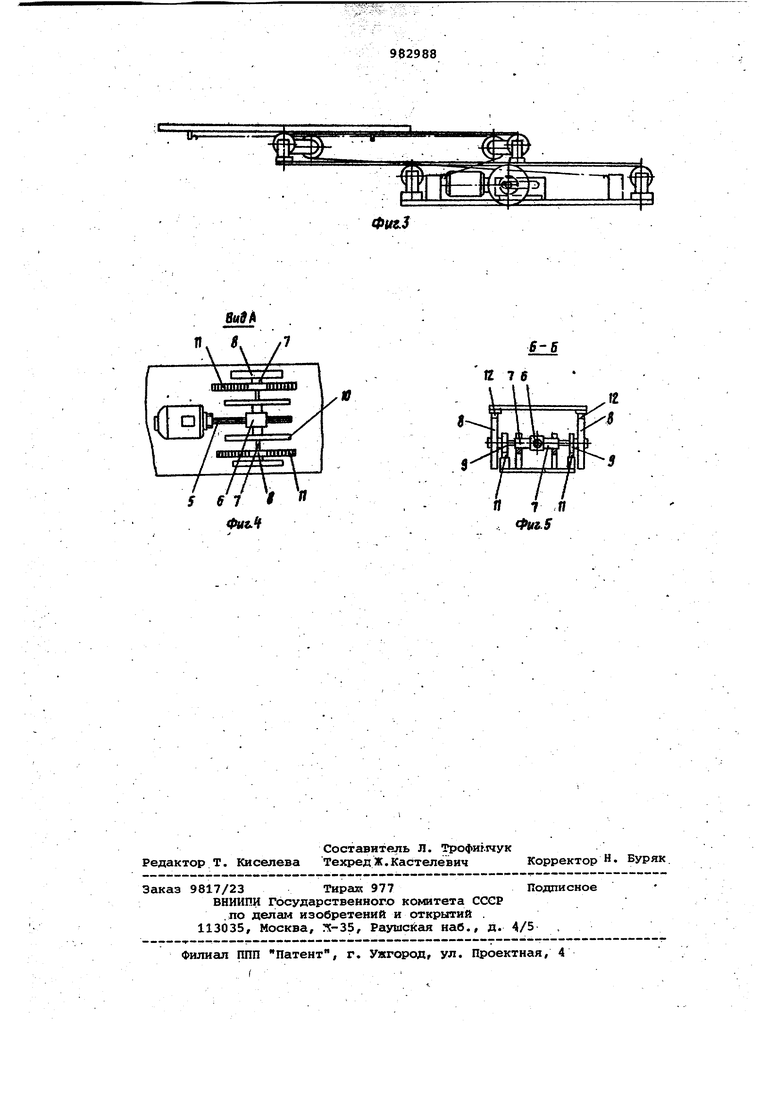
На фиг. 1 - телескопический зах- ват, вид сбоку; на фиГ. 2 - то же, с выдвинутыми платформами вправо; на фиг,,2 - то же, с выдвинутыми платфо1млами влево; на фиг. 4 - вид А на ,фиг. 1; на фиг. 5 - разрез Б-Б на фиг. 1.
Захват состоит из основания 1, вы;с1вижных платформ 2 и 3, злектро10двигателя 4 с винтом 5, гайки 6 с ПОЛУОСЯ1-1И 7, двух блоков шестерен с большой 8 и малой 9 шестернями, направлжацих 10, реек 11 нижней платформы и реек 12 верхней плат15форглы, тросов 13 и блоков 14.
Захват работает следующим образом .
Для перемещения захвата влево или вправо включают злектродвигатель
20 4 и обеспечивают вращение вала в нужном направлении.
Вал вращает закрепленный на нем винт 5, который, вращаясь, обеспечивает перемещение гайки с полуося25 1,1и по Нёшравляювдим 10 в ту или другую сторону. Гайка 6 через полуоси
7передает двиясение блокам шестерен
8и 9, которыеуперемещаясь, совершают одновременно врап ательное и пос30тупательное движения.
При этом малая Шестерня 9 блока перекатывается по неподвижной рейке Ц, а большая шестерня 8, находясь в зацеплении с рейкой 12 промежут чной платформы 2, выдвигает последнюю в нужном направлении. При выдвижении промел(уто1ной платформы 2 с помощью тросов 13 и блоков 14 выдвигается и верхняя платформа 3. Таким, образом, при перемещении rcifiKH 6 на небольшую величину, малая шестерня 9 делает полный оборот, большая шее-терня 8 делает также полный оборот и за счет передаточного отношения шестерен 8 и 9 выдвигает также промежуточную пла форяу 2. , Верхняя выдвижная платофрма 3 за счет блоков 13 и тросов 14 выд- , вигается также на определенную величнну.
Следовательно, при передвижении i гайки на некоторую величину верхняя платформа 3 выдвигается на определенную величину,
Такая конструкция захвата обеспечивает максимальный вылет верхней грузозахватной выдвижной платформы при наименьшем перемещений гайки. Кроме того,предлагаемая конструкция захвата намного прсаце и надежней i в эксплуатации по сравнению с известными. Это позволяет упростить конструкцию как захвата, таки крана в целом, уменьшить габариты и вес
и повысить эксплуатационную нёщежность.
Формула изобретения
1.Телескопический захват, содержащий неподвижное основание, на котором установлены выдвижные платформы, соединенные между собой при пог мощи трособлочной система, и привод выдвижения платформ, выполненный
с блоками шестерен разного диаметра, о т л и ч а ю ц и и с я тем, что, с целью упрощения конструкции и повышения эксплуатационной надежности захвата, привод содержит механизм перемещения блоков шестерен, выполненный в виде пары винт-гайка, при ,этом гайка механизма перемещения снабжена с двух сторон полуосями и установлена с возможностью .перемещения в горизонтальной плоскости, а блоки шестерен установлены на полуосях.
2.Захват по п.1, отличающийся тем, что, с целью предотвращения поворота гайки с полуосями, на основании захвата установлены направлякяцие для перемещающихся полуосей.
Источники информации, принятые во внимание при экспертизе
1. Авторское свидетельство СССР по заявке 2796428/27-11, кл. В 66 F 9/14, 1978.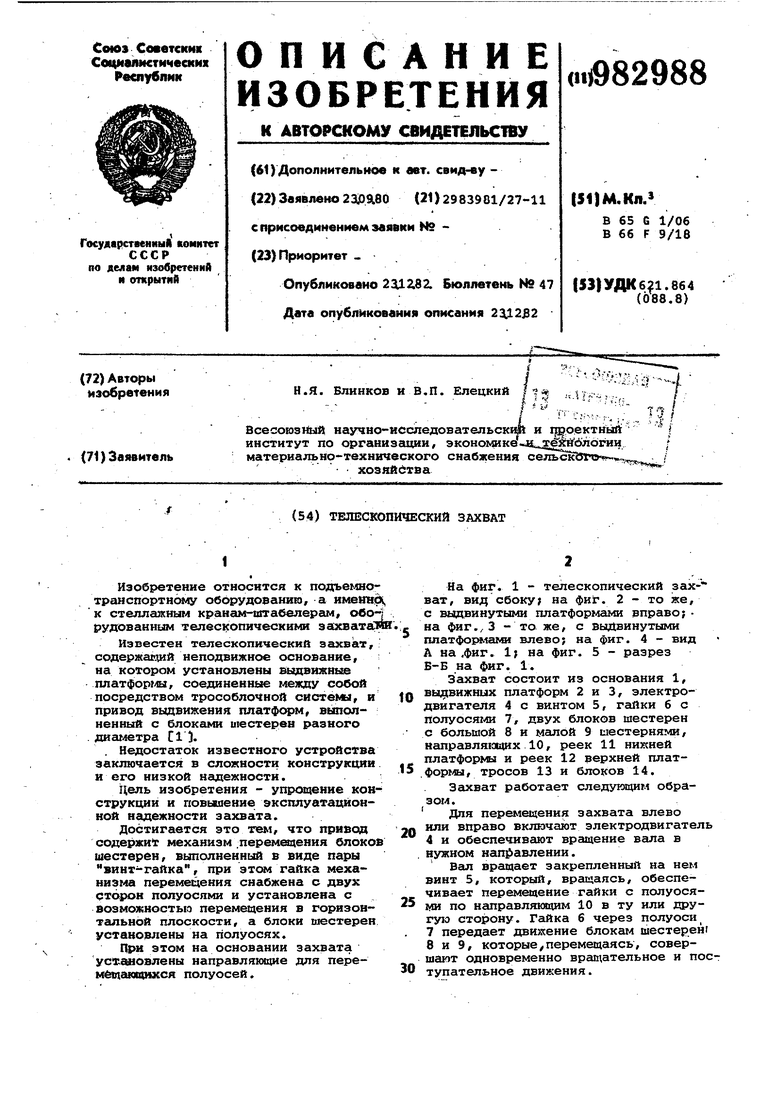
| название | год | авторы | номер документа |
|---|---|---|---|
| Телескопический захват | 1979 |
|
SU863510A1 |
| ТЕЛЕСКОПИЧЕСКОЕ СТРЕЛОВОЕ УСТРОЙСТВО | 2021 |
|
RU2772764C1 |
| ПОЖАРНО-СПАСАТЕЛЬНАЯ МАШИНА, РАМА ОПОРНОГО ОСНОВАНИЯ, УСТАНОВЛЕННЫЕ НА НЕЙ ЦИСТЕРНА, ПОДЪЕМНО-ПОВОРОТНОЕ УСТРОЙСТВО, ПОЖАРНО-СПАСАТЕЛЬНАЯ ЛЕСТНИЦА И СИСТЕМА ЕЕ ВЫДВИГАНИЯ | 2005 |
|
RU2292928C1 |
| Машина для трелевки деревьев | 1983 |
|
SU1134427A1 |
| ТЕЛЕСКОПИЧЕСКАЯ МАЧТА | 2000 |
|
RU2198131C2 |
| Телескопический грузозахват | 1989 |
|
SU1671550A1 |
| МОНТАЖНОЕ НАВЕСНОЕ ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО | 2002 |
|
RU2235672C2 |
| Устройство для формирования пакетов штучных грузов | 1978 |
|
SU749770A1 |
| Манипулятор | 1982 |
|
SU1013263A1 |
| Устройство для подачи груза в проемы здания | 1990 |
|
SU1766831A1 |
W
6-5
fZ 76
