Изобретение относится к оборудова нию складов, в частности к телескопическим захватам кранов-штабелёров. Известен захват телескопический, содвржа1ций основание, верхнюю и промежуточную выдвижные платформы, связанные между собой посредством трособлочной системы, и привод выдвижения платформ ij Известный захват не позволяет использовать в качестве привода силовой цилиндр, необходимый в определен ных условиях его эксплуатации. Известен захват телескопический, преимущественно для стеллажных кранов-штабелеров, содержащий неподвижное основание, верхнюю и промежуточную платформы, связанные между со.бой трособлочной системой, и привод выдв жения платформ, включающий силовой цилиндр t2j. в этом захвате требуется производить выдвижение штока цилиндра на большое расстояние, что снижает эксплуатационные характеристики захват Цель изобретения - улучшение эксплуатационных характеристик захвата за счет обеспечения наибольшего вылета выдвижных платформ при наименьшем перемещении штока силового цилиндраЦель достигается тем, что на корпус штока закреплен блок из двух шестерен разного диаметра, меньшая из которых связана с основанием посредством закрепленной на нем зубчатой рейки, а большая - с промежуточной платформой посредством закрепленной на ней другой зубчатой рейки. На фиг. 1 изображен предлагаемый телескопический захват, исходное положение, вид сбоку; на фиг. 2 - то же, с выдвинутыми платформами влево, вид сбокуj на фиг. 3 - то же, с выдвинутыми платформами вправо, вид сбоку. Захват состоит из основания 1, промежуточной выдвижной платформы 2, нижняя сторона которой снабжена зубчатой рейкой (не показана), верхней выдвижной платформы 3, силового цилиндра 4 со штоком 5, блока шестерен с малой 6 и большой 7 шестернями, неподвижной рейки 8, жестко установленной на основании 1, блоков 9, закрепленных на промежуточной платформе 2, тросов 10, закрепленных одним концом на верхней выдвижной платформе 3, а другим на основании 1 захвата. Захват работает следующим образом.
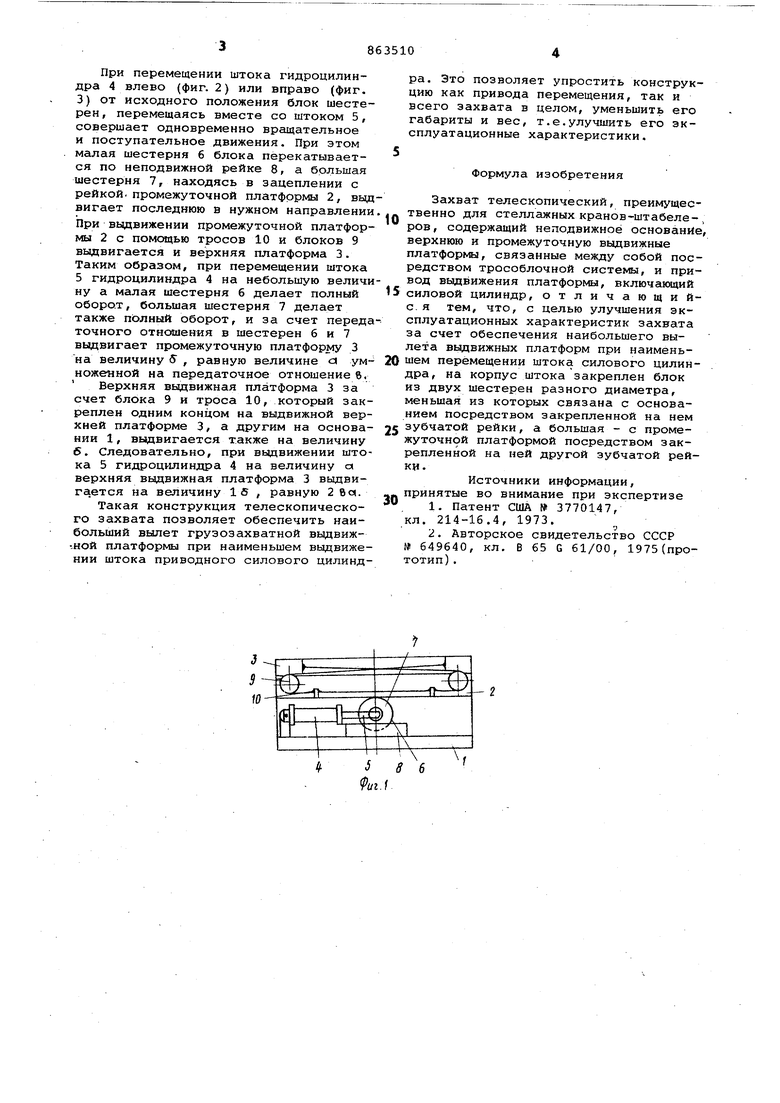
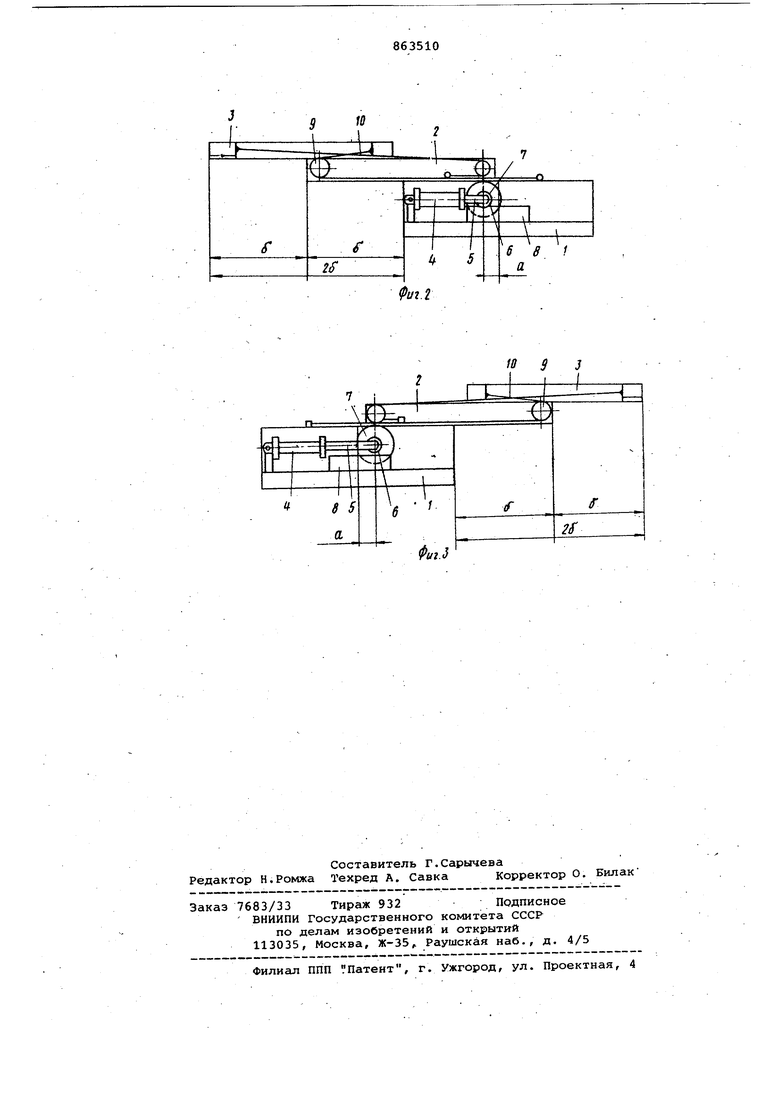
При перемещении штока гидроцилиндра 4 влево (фиг. 2) или вправо (фиг. 3) от исходного положения блок шестерен, перемещаясь вместе со штоком 5, совершает одновременно вращательное и поступательное движения. При этом малая шестерня б блока перекатывается по неподвижной рейке 8, а большая шестерня 7, находясь в зацеплении с рейкой, промежуточной платформы 2, выдвигает последнюю в нужном направлении При вьвдвижении промежуточной платформы 2 с помощью тросов 10 и блоков 9 выдвигается и верхняя платформа 3. Таким образом, при перемещении штока 5 гидроцилиндра 4 на небольшую величину а малая шестерня 6 делает полный оборот, большая шестерня 7 делает также полный оборот, и за счет передаточного отношения в шестерен 6 и 7 выдвигает промежуточную платформу 3 на величину S , равную величине а умноженной на передаточное отношение в, Верхняя выдвижная платформа 3 за счет блока 9 и троса 10, который закреплен одним концом на выдвижной верхней платформе 3, а другим на основании 1, вьадвигается также на величину 6. Следовательно, при вьщвижении штока 5 гидроцилиндра 4 на величину а верхняя выдвижная платформа 3 выдвигается на величину 15 , равную 2 йа.
Такая конструкция телескопического захвата позволяет обеспечить наибольший вылет грузозахватной выдвиж,ной платформы при наименьшем выдвижении штока приводного силового цилиндра. Это позволяет упростить конструкцию как привода перемещения, так и всего захвата в целом, уменьшить его габариты и вес, т.е.улучшить его эксплуатационные характеристики.
Формула изобретения
Захват телескопический, преимущественно для стеллажных кранов-штабеле-, ров, содержащий неподвижное основание, верхнюю и промежуточную выдвижные платформы, связанные между собой посредством трособлочной системы, и привод вьздвижения платформы, включающий
силовой цилиндр, отличающийс. я тем, что, с целью улучшения эксплуатационных характеристик захвата за счет обеспечения наибольшего вылета вьадвижных платформ при наименьшем перемещении штока силового цилиндра, на корпус штока закреплен блок из двух шестерен разного диаметра, меньшая из которых связана с основанием посредством закрепленной на нем
зубчатой рейки, а большая - с промежуточнрй платформой посредством закрепленной на ней другой зубчатой рейки.
Источники информации,
принятые во внимание при экспертизе
1. Патент США № 3770147, кл. 214-16.4, 1973. .
2. Авторское свидетельство СССР № 649640, кл. В 65 G 61/00, 1975(прототип).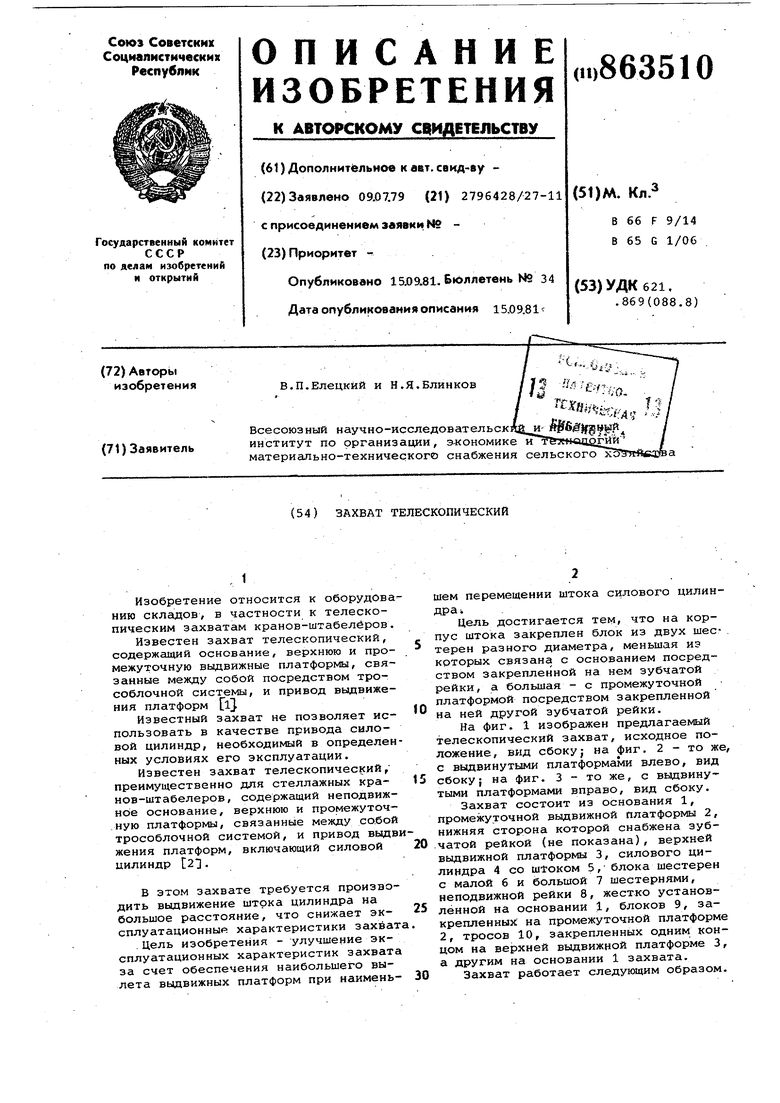
| название | год | авторы | номер документа |
|---|---|---|---|
| Телескопический захват | 1980 |
|
SU982988A1 |
| Устройство для управления приводом телескопического захвата стеллажного крана-штабелера | 1986 |
|
SU1418206A1 |
| Устройство для управления приводом выдвижения телескопического захвата стеллажного крана-штабелера | 1982 |
|
SU1062138A1 |
| Грузоподъемник крана-штабелера | 1990 |
|
SU1733347A1 |
| Устройство для управления приводом телескопического захвата стеллажного крана-штабелера | 1982 |
|
SU1034929A1 |
| Устройство для управления телескопическим захватом стеллажного крана-штабелера | 1981 |
|
SU1024393A1 |
| Устройство для управления приводом телескопического захвата стеллажного крана-штабелера | 1982 |
|
SU1082706A1 |
| Устройство для управления приводом выдвижения телескопического захвата стеллажного крана-штабелера | 1985 |
|
SU1331747A1 |
| Телескопический захват для грузоподъемных машин | 1975 |
|
SU649640A1 |
| Транспортное средство с погрузочно-разгрузочным устройством | 1990 |
|
SU1787831A1 |
9
