(54) СТРОПОВЫЙ ЗАХВАТ
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ДИСТАНЦИОННОЙ РАССТРОПОВКИ ГРУЗА | 2003 |
|
RU2267456C2 |
| Строп для подъема груза | 1974 |
|
SU703469A1 |
| Консольно-поворотный кран | 1985 |
|
SU1403549A1 |
| Автоматическая сборочная линия | 1985 |
|
SU1296350A1 |
| Устройство для изготовления гиперболоидных контактных узлов Карташева В.В. | 1987 |
|
SU1554058A1 |
| Автоматический магнитный захват | 1978 |
|
SU789368A1 |
| Устройство для чистки изделий текстильного и кожевенного производства | 1981 |
|
SU1011747A1 |
| Тканеформирующее устройство ткацкого станка для выработки тканей переменной ширины | 1985 |
|
SU1328411A1 |
| Поворотный делительный стол | 1977 |
|
SU745650A1 |
| КОМБИНИРОВАННЫЙ ТРЕНАЖЕР | 1998 |
|
RU2125902C1 |
1
Изобретение относится к подъемнотранспортному оборудованию, в частности к строповым захватам.
Известен строповый захват, содержащий корпус с вырезом, расположенный с возможностью перемещения внутри корпуса подпружиненный палец, гибкий элемент дистанционного управления и механизм фиксации пальца, включающий в себя подпружиненый двуплечий рычаг с зубом на одном плече 1 .
Известный строповый захват при случайном натяжении гибкого элемента расстроповывается, что может привести к падению груза с высоты.
Цель изобретения - повыщение надежности и исключение расстроповки при случайном натяжении гибкого элемента.
Поставленная цель достигается тем, что в строповом захвате палец снабжен жестко прикрепленной к его торцу и расположенной вдоль его продольной оси рейкой, а механизм фиксации пальца - установленным перпендикулярно к рейке с возможностью взаимодействия с ней подпружиненным фиксатором, при этом зуб рычага установлен в нем подвижно и подпружинен с возможностью взаимодействия с рейкой.
а гибкий элемент присоединен к другому плечу рычага.
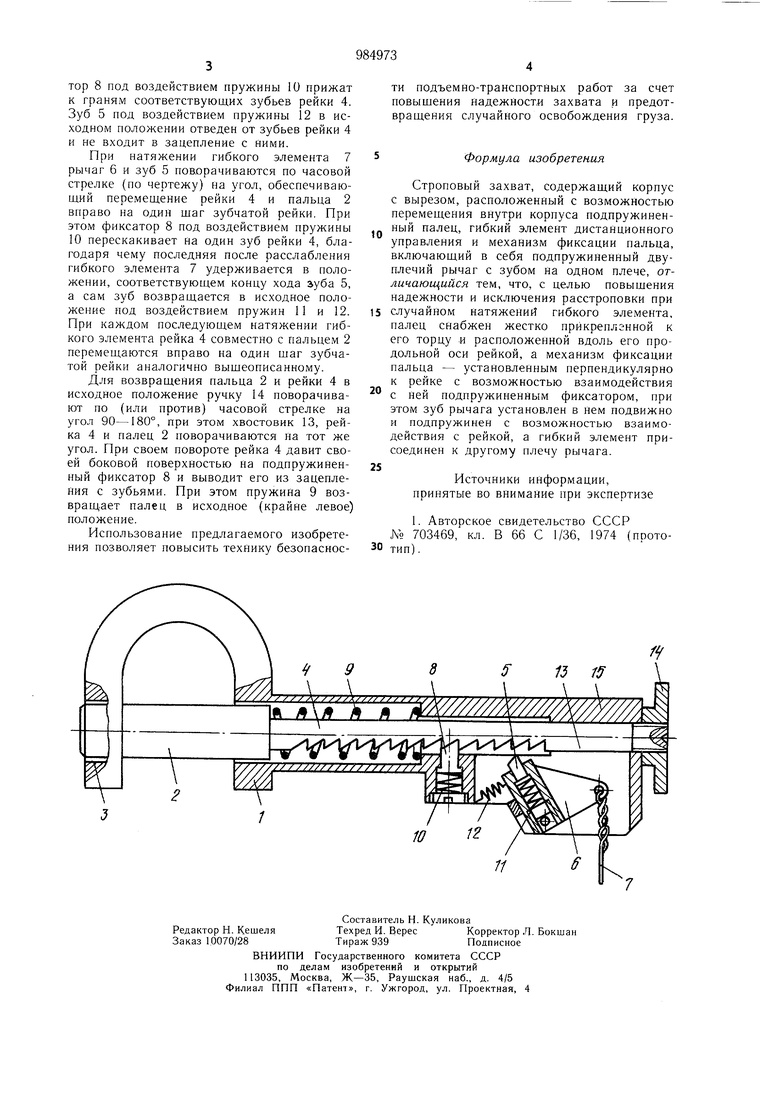
На чертеже представлен строповый захват, общий вид.
Строповый захват содержит корпус 1 5 с подвеской, имеющей форму скобы, запорный элемент, выполненный, в частности, в виде пальца 2, для которого в корпусе 1 выполнены соосно расположенные отверстия 3, зубчатую рейку 4, которая встык соединена с пальцем 2, зуб 5, установленный
10 в рычаге 6, кинематически связанном с гибким элементом 7, и фиксатор 8. Рейка 4 с пальцем 2, фиксатор 8, зуб 5 и рычаг 6 подпружинены посредством соответственно пружин 9-12. Рейка 14 снабжена хвос15 товйком 13 с ручкой 14. Кожух 15 жестко закреплен к корпусу 1.
Устройство работает следующим образом.
В исходном положении, при котором происходит транспортирование груза, па20лец 2 и соединенная с ним рейка 4 находятся в крайнем левом (по чертежу) положении, при этом палец 2 расположен в обоих отверстиях 3 корпуса 1, гибкий элемент 7 не натянут (свободно свисает), а фикса
