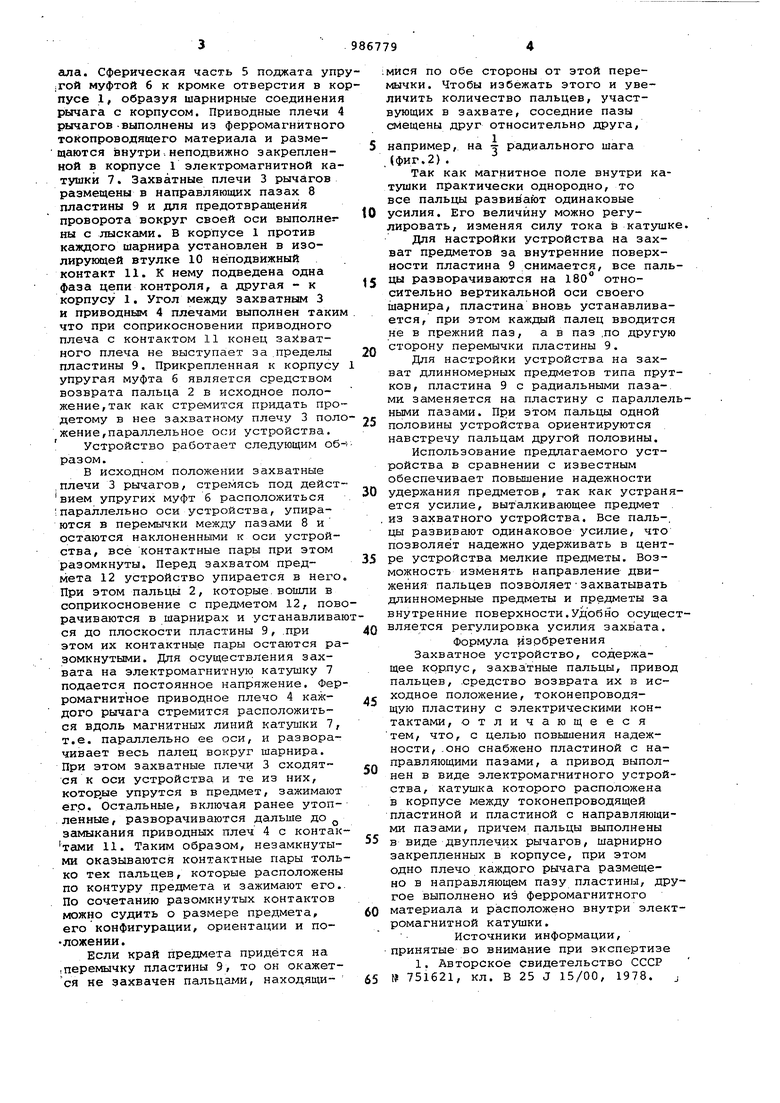
ала. Сферическая часть 5 поджата упр ;ГОй муфтой 6 к кромке отверстия в к пусе 1, образуя шарнирные соединени рычага с корпусом. Приводные плечи рычагов-выполнены из ферромагнитного токопроводящего материала и разме щаются внутри.неподвижно закрепленной в корпусе 1 электромагнитной ка тушки 7. Захватные плечи 3 рычагов размещены в направляющих пазах 8 пластины 9 и для предотвращения проворота вокруг своей оси выполнегны с лысками. В корпусе 1 против каждого шарнира установлен в изолирующей втулке 10 неподвижный контакт 11. К нему подведена одна фаза цепи контроля, а другая - к корпусу 1. Угол между захватным 3 и приводным 4 плечами выполнен таки что при соприкосновении приводного плеча с контактом 11 конец за}4ватного плеча не выступает за .пределы пластины 9. Прикрепленная к корпусу упругая муфта б является средством возврата пальца 2 в исходное положение, так как стремится придать про детому в нее захватному плечу 3 пол жение, параллельное оси устройства. Устройство работает следующим об разом. . В исходном положении захватные , плечи 3 рычагов, стремясь под деист вием упругих муфт б расположиться параллельно оси устройства, упираются в перемычки между пазами 8 и остаются наклоненными к оси устройства, все контактные пары при этом разомкнуты. Перед захватом предмета 12 устройство упирается в него При этом пальцы 2, которые вошли в соприкосновение с предметом 12, пов рачиваются в шарнирах и устанавлива ся до плоскости пластины 9, .при этом их контактные пары остаются ра зомкнутыми. Для осуществления захвата на электромагнитную катушку 7 подается постоянное напряжение. Фер ромагнитное приводное плечо 4 каждого рычага стремится расположиться вдоль магнитных линий катушки 7, т.е. параллельно ее оси, и разворачивает весь палец вокруг шарнира. При этом захватные плечи 3 сходятся к оси устройства и те из них, котор,ые упрутся в предмет, зажимают его. Остальные, включая ранее утопленные , разворачиваются дальше до замыкания приводных плеч 4 с контак тами 11. Таким образом, незамкнутыми оказываются контактные пары толь ко тех пальцев, которые расположены по контуру предмета и зажимают его. По сочетанию разомкнутых контактов можно судить о размере предмета, его конфигурации, ориентации и положеНИИ. Если край предмета придётся на .перемычку пластины 9, то он окажется не захвачен пальца ли, находящимися по обе стороны от этой перемычки. Чтобы избежать этого и увеличить количество пальцев, участвующих в захвате, соседние пазы смещены друг относительно друга, например, на радиального шага ,(фиг.2) . Так как магнитное поле внутри катушки практически однородно, то все пальцы развивают одинаковые усилия. Его величину можно регулировать, изменяя силу тока в катушке. Для настройки устройства на захват предметов за внутренние поверхности пластина 9 снимается, все пальцы разворачиваются на относительно вертикальной оси своего шарнира, пластина вновь устанавливается, при этом каждый палец вводится не в прежний паз, а в паз ,по другую сторону перемычки пластины 9. Для настройки устройства на захват длинномерных предметов типа прутков, пластина 9 с радиальными пазами заменяется на пластину с параллельными пазами. При этом пальцы одной половины устройства ориентируются навстречу пальцам другой половины. Использование предлагаемого устройства в сравнении с известным обеспечивает повышение надежности удержания предметов, так как устраняется усилие, выталкивающее предмет из захватного устройства. Все паль-, цы развивают одинаковое усилие, что позволяет надежно удерживать в центре устройства мелкие предметы. Возможность изменять направление движения пальцев позволяетзахватывать длинномерные предметы и предметы за внутренние поверхности.Удобно осуществляется регулировка усилия захвата. Формула изобретения Захватное устройство, содержащее корпус, захватные пальцы, привод пальцев, средство возврата их в исходное положение, токонепроводящую пластину с электрическими контактами, отличающееся тем, что, с целью повышения надежности, .оно снабжено пластиной с направляющими пазами, а привод выполнен в виде электромагнитного устройства, катушка которого расположена в корпусе между токонепроводящей пластиной и пластиной с направляющими пазами, причем пальцы выполнены в виде двуплечих рычагов, шарнирно закрепленных в корпусе, при этом одно плечо каждого рычага размещено в направляющем пазу пластины, другое выполнено из ферромагнитного материала и расположено внутри электромагнитной катушки. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР 751621, кл. В 25 J 15/00, 1978. j
| название | год | авторы | номер документа |
|---|---|---|---|
| Очувствленный схват | 1985 |
|
SU1294602A1 |
| Захватное устройство | 1985 |
|
SU1293020A1 |
| БИСТАБИЛЬНОЕ МИНИАТЮРНОЕ РЕЛЕ ВЫСОКОЙ МОЩНОСТИ | 2011 |
|
RU2524373C2 |
| Установка для очистки и ремонта емкостей | 1987 |
|
SU1480903A1 |
| Грузозахватное устройство | 1990 |
|
SU1736899A1 |
| Захват | 1981 |
|
SU984862A1 |
| Дверное устройство | 1984 |
|
SU1471951A3 |
| Хранилище для сельскохозяйственных продуктов | 1990 |
|
SU1785970A1 |
| ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО | 1998 |
|
RU2137347C1 |
| Переключающее устройство | 1976 |
|
SU753370A3 |

Вид f(
Фиг.2
Pui.J
