1
Изобретение относится к области очистки и ремонта различных емкостей, а именно к мойке и ремонту железнодорожных цистерн.
Цель изобретения - расширение технологических возможностей, повышение качества очистки и ремонта.
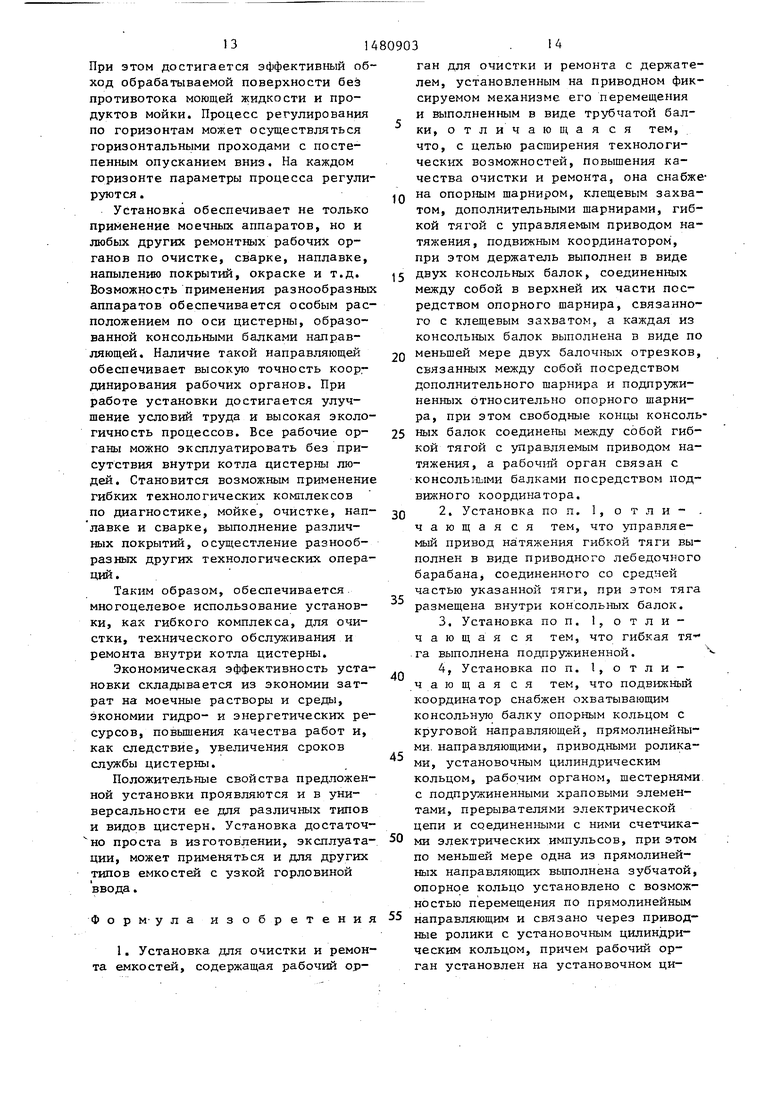
На фиг. 1 показана установка для очистки и ремонта емкостей в исходном и рабочем положении, общий вид; на фиг. 2 - то же, вид сбоку; на фиг. 3 - ходовая тележка для ввода консольных балок в емкость, разрез
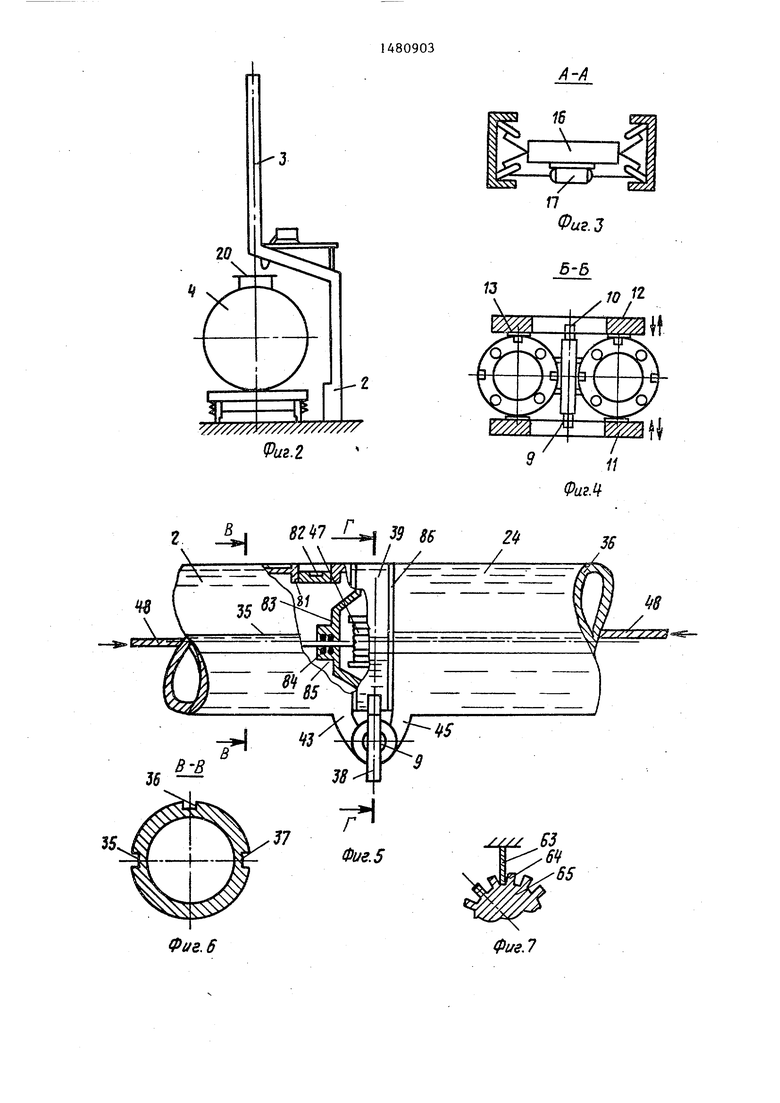
А-А на фиг. 1; на фиг. 4 - соединение консольных балок в исходном положении, разрез Б-Б на фиг. 1; на фиг. 5 - соединение консольных балок опорным шарниром, вид спереди; на фиг. 6- - поперечный профиль консольной балки, сечение В-В на фиг. 5, на фиг. 7 - схема стопорения натяжного устройства гибкой тяги} на фиг. 8 - лебедочный привод натяжения гибкой тяги, разрез Г-Г на фиг. 5; на фиг. 9 - пара: захватная лапа - опорный шарнир, сечение Д-Д
Јъ
Об О
со о со
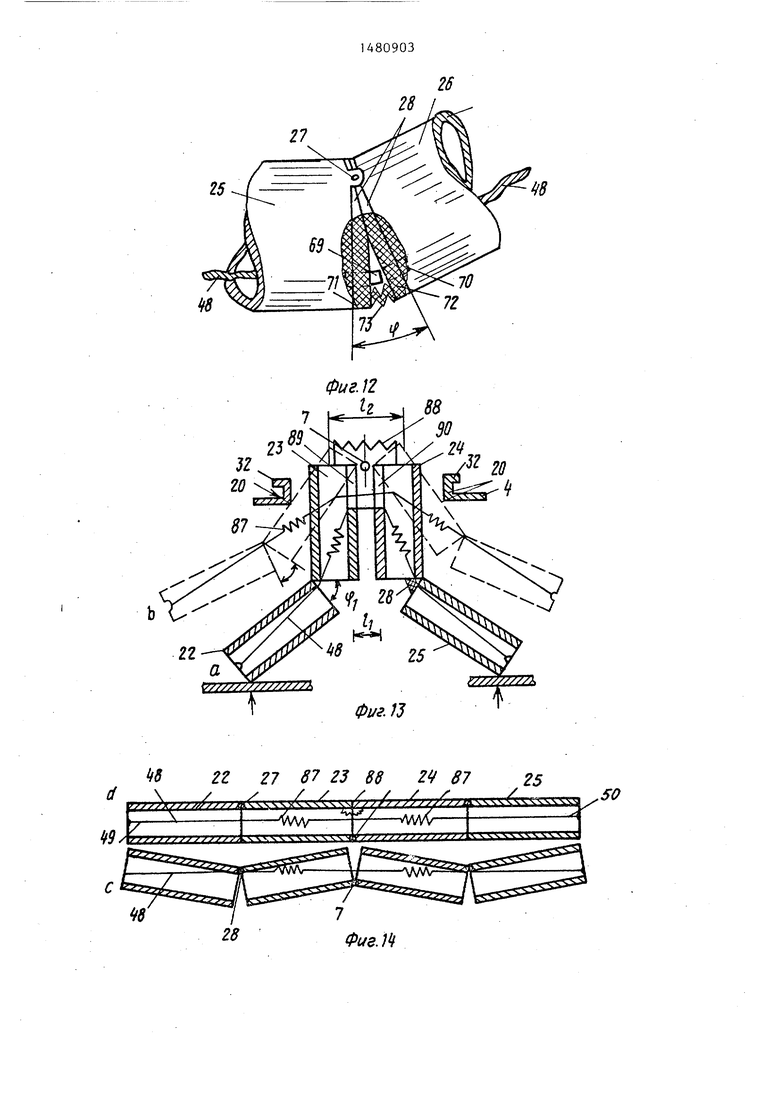
на фиг. 8; на фиг. 10 - клещевой захват, вид спереди; на фиг. 11 г- то же, вид сбоку, на фиг. 12 - соединение балочных отрезков посредст- вом дополнительного шарнира; на фиг. 13 - пружинный привод натяжения гибкой тяги, вид спереди; на фиг.14- схема приведения балочных отрезков в рабочее положение; на фиг. 15 - опорное кольцо координатора, общий вид; на фиг. 16 - координатор, общий вид,; на фиг. 17 - рабочий орган, установленный на координаторе, общий вид; на фиг. 18 - электромеханическа схема координатора.
Установка для очистки и ремонта емкостей имеет мачтовую опору 1 (фиг. 1), состоящую из станины 2 (фиг. 2) и направляющей стойки 3, под которую подводится цистерна 4, на которой закреплен в исходном положении держатель в виде консольных балок 5 и 6 (левая и правая), соединенных между собой опорным шарниром 7. Консольные балки 5 и 6 расположены вертикально и удерживаются в таком положении клещевым захватом 8, который соединяется с выходящими полуосями 9 и 10 (фиг, 4) своими захватными лапами 11 и 12, снабженными дополнительно для удержания упругими губками 13 (фиг. 12) для лучшей фиксации в вертикальной плоскости консольных балок 5 и 6. Сближение и разводка захватных лап обеспечивается их поворотом вокруг осей шарниров 14 (фиг. 1) посредством сервопривода 15 (фиг. 11). Указанные шарниры 14 выполнены на приводном фиксируемом механизме перемещения, выполненном в виде вертикально-ходовой тележки 16, которая посредством привода 17 перемещается в направляющих швеллерах 18 и 19 стойки 3 (фиг. 3). Ось стойки 3 и горловины 20 цистерны 4 при ее постановке совмещаются. Консольные балки 5 и 6 выполнены трубчатого профиля. Опорный шарнир 7 расположен по нижней кромке поперечного профиля, исходя из рассмотрения этого профиля при горизонтальном расположении консольных балок в соединенном рабочем положении (положение m,, n, S.,) .
Консольные балки 5 и 6 выполнены состоящими из балочных отрезков 21- 23 и 24-26, стыкуемых между собой с образованием единой балки. Указанные
0
5
0
5
0
5
0
5
отрезки соединены между собой дополнительными шарнирами 27, расположенными по верхней кромке поперечного профиля. Причем они в месте расположения дополнительных шарниров 27, соединяющих балочные отрезки, образующие звенья плоской шарнирной цепи, подпружинены друг относительно друга пружинящими вставками 28, выполненными из упругого материала, например резины, и вызывающими подъем балочных отрезков относительно оси их соединения.
Подпружинивание может выполняться и другим образом: пружинами растяжения, резиновыми жгутами и т.д. (возможно выполнение и без подпружини- вания).
Для поддержания в исходном положении консольных балок 5 и 6 служит охватывающее их кольцо 29, снабженное внутри роликами 30 для скольжения по образованной из труб колонне. Указанное кольцо 29 имеет пружинящие скобы 31 для захвата за фланец 32 горловины 20 цистерны, крайние балочные отрезки 21 и 26 снабжены по концам пружинящими усиками 33, препятствующими снятию кольца 29. Кроме того, указанные усики 33 удерживают (один или несколько) от выхода с консольных балок 5 и 6 рабочего органа 34, перемещаемого по указанным балкам как по направляющим. С этой целью поперечный профиль (в рассматриваемом варианте трубчатый) балок 5 и 6 (фиг. 5) выполнен с направляющими пазами 35-37.
В целом приводная тележка 16 и клещевой захват 8 образуют фиксируемый механизм перемещения консольных балок 5 и б относительно направляющей стойки 3, закрепленной неподвижно в пространстве.
Составляющие конструкции в виде: связи опорного шарнира 7 с клещевым захватом 8 через его лапы 11 и 12, губки 13 п 14, связи консольных балок 5 и 6 с кольцом 29 и связи пружинящих вставок 28 с балочными отрезками 21-26 образуют механизм фиксации консольных балок 5 и 6 в исходном положении.
Кроме того, в конструкции образован, с включением уже названных элементов, механизм фиксации консольных балок 5 и 6 в рабочем положении.
51
Предусмотрено два варианта исполнения механизма фиксации: первый вариант - в рабочем положении с лебедочным приводом натяжения гибкой тяги и второй вариант - с пружинным автоматическим самофиксирующим приводом.
В первом варианте (фиг. 6) опорный шарнир 7 выполнен следующим образом. Полуось 9 жестко соединена на своем выходе с опорным выступом 38, приваренным к трубчатому захватному кольцу 39 с другрй стороны, через опорный выступ 10 к захватному кольцу так же соединена полуось 10 (фиг.8). Опорные выступы 38 и 40 при взаимодействии с захватными лапами 11 и 12 входят в их профилированные углубления 41 и 42 без возможности поворота, таким образом захватное кольцо 39 поддерживается в вертикальном положении. Каждая из полуосей 9 и 10, кроме того, образует шарнирное соединение в опорном шарнире 7 балочных отрезков 23 и 24. Балочный отрезок 23 связан с осями 9 и 10 петлями 43 и 44, а отрезок 24 соответственно - петлями 45 и 46.
В захватном кольце 39 (фиг. 8) размещен привод 47 натяжения гибкой тяги 48, соединяющей крайние звенья 21 и 26 (фиг. 1) своими концами 49 и 50, причем указанные концы закреплены в средней части профиля образуемой трубчатой балки - единой трубчатой балки, составленной из консольных балок 5 и 6. Так, что при натяжении гибкой тяги 48 она занимает среднее положение между шарнирами 27 и опорным шарниром 7. При этом создаются встречные моменты М вращения относительно шарниров 7 и 27, направленные на соединение балочных отрезков, расположенных парами у соответствующих шарниров.
Привод натяжения (фиг. 8) состоит из присоединяемой к приводной головке 51 приводной оси 52, верх которой имеет профилированный под квадрат конец 53, зацепляемый с профильным углублением 54 головки 51. Последняя закреплена (фиг. 10, 11) на валу 55 электропривода 56, установленного на лапе 13. Указанный вал 55 взаимодействует с рычагом 57 с возвратной пружиной 58. Нажатием на рычаг 57 обеспечивается подача вниз приводной Головки 51 и включение сцепления.
809036
Приводная ось 52 (фиг. 8) выполнена вертикально-подвижной в валу 59 лебедочного барабана 60 и зацеплена i с ним в отношении вращения продольными шлицами 61. Снизу ось 52 подперта пружиной 62 сжатия, а сверху ограничена заклинивающимися скошенными стопорными пластинами 63, которые
ТО входят между зубьями 64 (фиг. 7) храповой шестеренки 65. Благодаря описанному устройству при нажатии приводной головки 51 вниз храповая шестерня 65 может подаваться в том же
15 направлении, сжимая пружину 62, и выходить из состояния стопорения, т.е. из зацепления со стопорными пластинами 63. При этом барабан 60 действует как лебедка, наматывающая
2о на себя концы 49 и 50 гибкой тяги 48, закрепленной на нем своей серединой. Вал 59 барабана закреплен в соединенных со стенками кольца опорах 66 вращения. При снятии нажима от
25 головки 51 под действием пружины сжатия происходит зацепление храповой шестерни 65 со стопорными пластинами 63 и стопорение натянутой гибкой тяги 48. Таким образом, при
Зо повороте рычага 57 усилием Q включается сцепление, обеспечиваемое нажатием диска 67 на диск 68. Последний подает вниз вал 55 и головку 51 и механизм стопорения разобщается за счет ухода вниз храповой шестерни 65 из зацепления со стопорными пластинами 63.
При натяжении гибкой тяги 48 (фиг. 1) благодаря ее расположению
40 внутри трубчатого профиля возникают в дополнительных шарнирах 27 моменты МДоп поворота пар балочных отрезков 21-26 вокруг осей шарниров, их соединяющих. Указанные моменты направлены на подъем звеньев относительно их осей и обеспечивают смыкание навстречу обращенных торцов балочных отрезков. Б опорном шарнире 7 возникают моменты Мы, обеспечивающие, наj.n против, поворот с опусканием балочных отрезков 23 и 24 относительно шарнира, их соединяющего. При этом, если осуществляется подача вниз консольных балок 5 и 6, то они занимают последовательно положения тгпг82 - т;пг53. Для повышения качества стыковки балочных отрезков предусмотрены в плоскости их поворота фиксирующие пальцы 69 (фиг. 12), входящие в
соответствующие углубления 70 до упора, при этом уплотнительные кольца 7 1 и 72, образующие в верхней своей части пружинящую вставку 28, смыкаются, герметизируя полость образующейся трубы.
Для обеспечения герметизации при раскрытых шарнирах 27 и 7 могут
10
15
20
предусматриваться растяжимые, например резиновые, рукава 73, закрывающие пространство полости. Для опира- ния приведенных в рабочее состояние консольных балок 5 и 6 они снабжены упругими торцевыми заглушками 74 и 75, обеспечивающими распор усилиями F в сторону днищ 76 и 77 цистерны 4. Усилия F, создаваемые днищами 76 и 77, обеспечивают поддержание балок 5 и 6 в соединении в виде направляющих даже при ослаблении натяжения гибкой тяги 48. Размещаемый на образованной балками 4 и 5 единой направляющей 78 рабочий орган 34 связывается гибкими коммуникациями 79 25 с источником 80 ресурсов.
В целях возможностей использования самой направляющей 78, как трубы для размещения технологических коммуникаций, предусмотрено выполнение (фиг. 6) заподлицо с поверхностью трубчатого профиля патрубков 81 на балках 5 и 6 для ввода коммуникаций, В случае, когда нет необходимости их использования, они закрыты пробками 82. В захватном кольце 39 все устройства размещаются в герметичном кожухе 83, снабженном выходным уплотненным посредством сальника 84 иатруб™ ком 85 для выхода гибкой тяги 48. Захватное кольцо 39 герметично прилегает к отрезкам 23 и 24 через уплотняющие прокладки 86.
14809038
В указанном варианте (фиг. 13) привод натяжения тяги 48 образован включенными в нее пружинами 87, благодаря чему тяга становится пружинящей в сторону укорочения. Соединяемые опорным шарниром 7 трубчатые отрезки 23 и 24 подпружинены пружиной
88в сторону поднятия относительно оси соединения. В исходном состоянии тята 48 выходит в продольные вырезы
89и 90 отрезков 23 и 24, которые в целом образуют единую сквозную, продольную прорезь. Опорный шарнир 7 со своими элементами расположен вне прорезей и не препятствует выходу
за него гибкой тяги 48 в положении а. В дальнейших позициях Ь, с, d,... (фиг. 14) по мере распрямления цепи из балочных отрезков 22-25 гибкая тяга входит внутрь трубчатого профиля. При этом необходимо взаимодействие со стенками цистерны.
При подъеме линии гибкой тяги 48 над осью опорного шарнира 7 происходит защелкивание элементов цепи в едкную балку под действием пружин 87.
Пружина 88 играет в процессе ,
защел30
35
40
кивания большую роль. При ее достаточно высокой мощности и жесткости может полностью осуществляться срабатывание механизма фиксации при упоре и скольжении по точкам А, В.
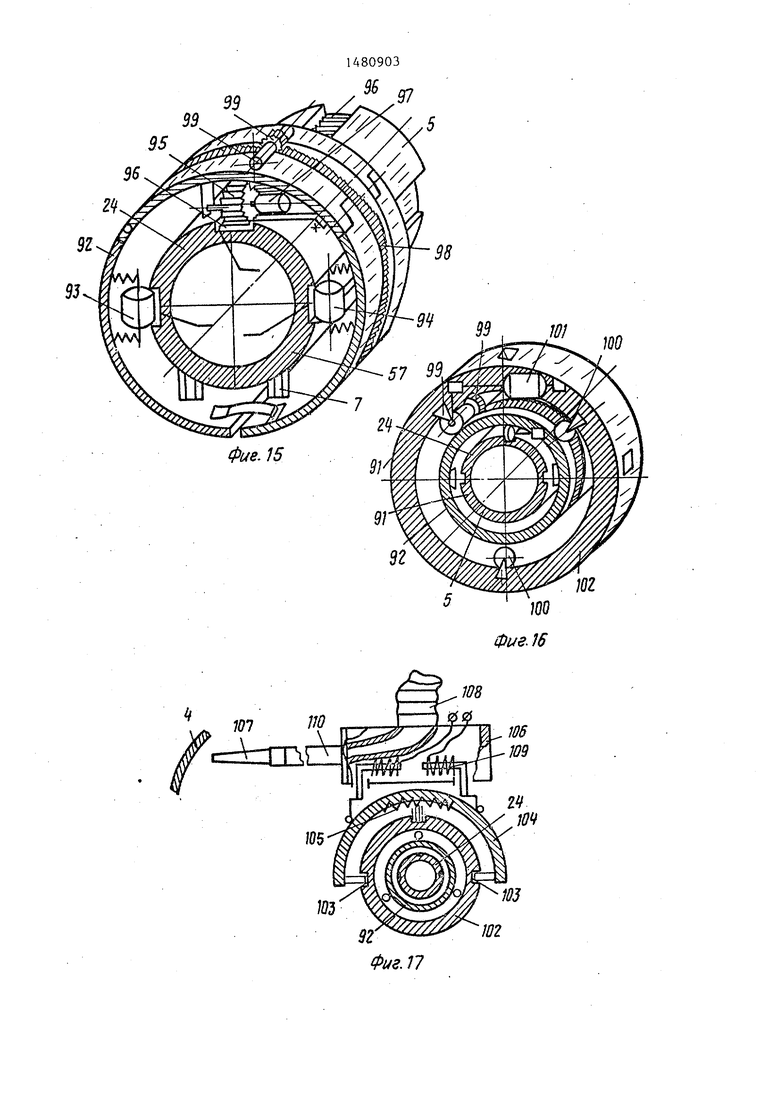
Предложенная установка (фиг. 1) снабжена специальным видом присоединения рабочего органа 34 к консольным балкам 5 и 6, образующим единую балку (она же направляющая 78, по которой перемещается рабочий орган 34). Это соединение осуществлено через координатор 91 (фиг. 15). Он состоит из опорного кольца 92, внутри которого имеются ролики 93 и 94 для движения по направляющим 35-37 и приводной зубчатый ролик 95, зацепляющийся с зубчатой рейкой 96, выполненной в направляющей 36. Зубчатый ролик 95 снабжен электроприводом 97, обеспечивающим продвижение координатора вдоль направляющей 78 (фиг. 1). На опорном кольце 92 (фиг. 15) выполнена круговая направляющая 98 в виде канавки с зубчатым профилем дна, т.е. она играет роль и направляющей и зубчатого колеса.
Во втором варианте исполнения механизма фиксации с пружинным автоматическим самофиксирующим приводом (фиг. 13) подача соединенных коль- сольных балок 5 и 6 производится вверх-вниз посредством клещевого захвата 8 (фиг. 1). Однако последний не имеет привода 56 (фиг. 11) вала 55 с приводной головки 51. Соответственно отсутствует и лебедочный барабан 60 (фиг. 8) и другие детали, с ним связанные, поскольку в них нет необходимости. Механика захватного кольца 39 в остальном остается та же, что и в первом варианте.
Пружина 88 играет в процессе ,
защел0
5
0
5
0
5
кивания большую роль. При ее достаточно высокой мощности и жесткости может полностью осуществляться срабатывание механизма фиксации при упоре и скольжении по точкам А, В.
Предложенная установка (фиг. 1) снабжена специальным видом присоединения рабочего органа 34 к консольным балкам 5 и 6, образующим единую балку (она же направляющая 78, по которой перемещается рабочий орган 34). Это соединение осуществлено через координатор 91 (фиг. 15). Он состоит из опорного кольца 92, внутри которого имеются ролики 93 и 94 для движения по направляющим 35-37 и приводной зубчатый ролик 95, зацепляющийся с зубчатой рейкой 96, выполненной в направляющей 36. Зубчатый ролик 95 снабжен электроприводом 97, обеспечивающим продвижение координатора вдоль направляющей 78 (фиг. 1). На опорном кольце 92 (фиг. 15) выполнена круговая направляющая 98 в виде канавки с зубчатым профилем дна, т.е. она играет роль и направляющей и зубчатого колеса.
С указанной направляющей взаимодействует ролик с зубчатым венцом 99 вместе с роликами 100. Ролик 99 снабжен приводом 101 вращения, закреп
ленным на установочном цилиндрическом кольце 102, поворотном, благодаря описанным роликам, вокруг направляющей 78, частью которой является консольная балка 5. На установочном кольце 102 выполнены крепежные места 103 в виде углублений, в которые входят (фиг. 17) с зацеплением клещевые захваты 104, связанные между собой фиксирующей пружиной 105, которые имеются на рабочем органе ЗА. Последний выполнен в виде моечной головки 106, имеющей сопло 107, подключенное к гибкому трубопроводу 108 Имеется также электромагнитный размыкатель клещей 109.
Координатор 91, имеющий приводы перемещения по направляющей 79 (фиг. 1) и поворота вокруг нее, управляемые через гибкие коммуникации 79, обеспечивает такие же возможности и для рабочего органа 34. В качестве примера такого органа показана моечная головка 106. Указанный координатор располагается весьма удобно по оси цистерны, обеспечивая одинаковую доступность всех ее внутренних стенок. При этом значительно упрощается конструкция самого рабочего органа, в котором нет необходимости размещать какие-либо механические приводы. Это позволяет применять разнообразные рабочие органы без их существенной реконструкции. При этом, если возникает необходимость контактного сближения со стенкой, добавляется лишь рычаг 110 (фиг. 17) радиального отхода от направляющей 78. В связи с этим установка допускает применение самых разнообразных рабочих органов с указанной схемой постановки.
В частности, предусматривается использование следующих рабочих органов: моечных, контактных вблизи поверхности и дальнобойных моечных головок, машинок для механической очистки, ввода диагностических телевизионных камер, перископических систем осмотра, приборов для научных исследований, шлифовальных устройств аппаратов для напыления и наплавки защитных пленок, сварочных аппаратов, устройств разогрева, контрольных дефектескопных средств и любых других ремонтных аппаратов.
Работу указанных устройств можно обеспечить как электрическими, так
10
20
25
,с
8090310
и механическими, гидравлическими, пневмоинерционными и другими видами приводов, допускающими подачу энергоносителя по гибким коммуникациям.
Работы внутри цистерны обеспечиваются без присутствия человека внутри котла цистерны, что обеспечивает максимальное обеспечение техники безопасности при высоком качестве проведения работ, которые могут быть выполнены автоматическими аппаратами.
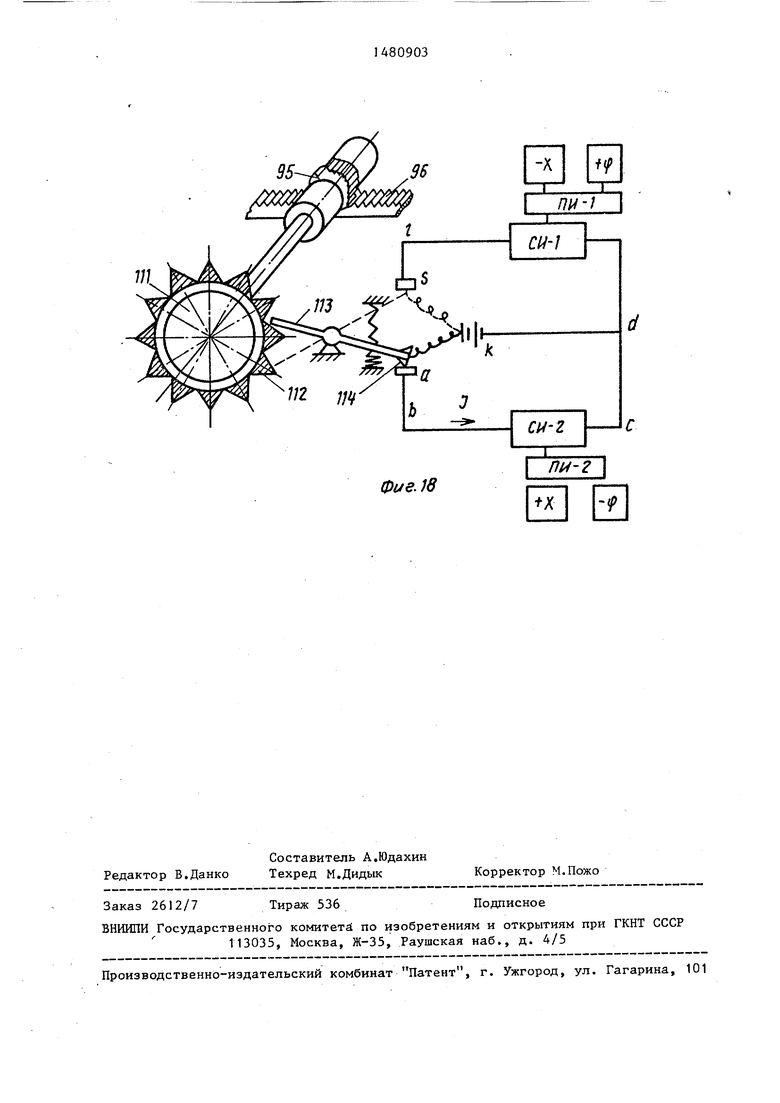
Для обеспечения высокой точности координирования рабочих органов на приводах координатора предусмотрены счетчики числа сцеплений зубьев, проходимых в процессе движения колец координатора (фиг. 18). Счетчики представляют собой соединенную с осью ролика 5 (99) шестеренку 111 с зубьями И2, взаимодействующими с подпружиненным храповым элементом 113, выполненным в виде двуплечего рычага, причем на одном его плече расположена храповая пластинка, проскакивающая по зубьям, а на втором - электрический контакт 14. При движении колеса в одном направлении контакт 1 1 4 периодически размыкает электрическую цепь, в которой находится счетчик импульсов СИ-2.
При вращении шестеренки 111 в противоположном направлении периодически прерывается при продвижении каждого зуба шестеренки электрическая цепь, в которой находится счетчик электрических импульсов СИ-1. Счетчики импульсов через преобразователи каждой цепи ПИ-2 и ПИ-1 дают сведения о пройденном пути, что высвечивается на дисплее в виде соответствующих координат. Устройство типа СИ-1 и ПИ известны.
Определение координат за счет подсчета прореагировавших зубьев обеспечивает высокую точность координирования, поскольку не происходит накопления погрешностей измерения, как если бы мы просто считали полные обороты роликов известными устройствами типа спидометров. Обеспечиваются здесь и широкие возможности программирования.
Установка работает следующим образом.
Перед проходом очередной цистерны на мачтовой опоре 1 (фиг. 1) закрепляются верхней частью консольные балки 5 и б, занимающие вертикальное
30
35
40
45
50
55
положение. При этом клещевой захват 8 соединен с опорным шарниром 7, захватное кольцо 39 стоит по вертикали, вал 55 сервопривода 56 соединен с лебедочным барабаном 60 (фиг.З и обеспечивает ослабление концов 49 и 50 гибкой тяги 48. Рабочий орган 34 закреплен на конце одной (или двух) консольной балки 5. Кольцо 29 фиксирует взаимное расположение консольных балок 5 и 6.
После установки цистерны 4 под установкой и подготовки ее к вводу устройств включается привод 17 тележки 16 и последняя подается вниз. При входе колонны из консольных балок 5 и 6 в горловину 20 цистерны 4 кольцо 29 усиками 31 зацепляется с фланцем 32 цистерны 4 и остается там в качестве направляющей для исключения воздействий названной колонны на горловину цистерны.
По мере дальнейшего продвижения колонны из консольных балок 5 и 6 после входа в горловину включается привод 56 натяжения гибкой тяги 48, который через вал 55 натягивает концы 49 и 50 гибкой тяги. Это натяжение вызывает подъем консольных балок 5 и 6 подобно крыльям вокруг опорного шарнира 7. Но одновременно освободившись от кольца 29, консольные балки распадаются на балочные отрезки 21-26, которые поднимаются относительно дополнительных шарниров 27 под действием пружинящих вставок 28. Консольные балки приобретают форму тгп 5г. При дальнейшем натяжении гибкой тяги 48 возникают моменты Мш и Ми, направленные на смыкание всех звеньев шарнирной цепи, состоящей из балочных отрезков 21-26, и они смыкаются в единую направляющую 78, которая представляет собой сплошную трубу, служащую как бы осью координат. Эта труба оперта концами в днища 76 и 77 цистерны 4 через торцевые заглушки 74 и 75, имеющие соответствующую упругую податливость для закрытия шарниров 7 и 27.
При вводе консольных балок 5 и 6 одновременно входят в цистерну 4 и гибкие коммуникации 79, и рабочий орган 34 вместе со своим координатором 91 оказывается в рабочей готовности.
После образования единой направляющей 78 в виде сплошной трубы клещевой захват 8 отсоединяется посредством привода 15 от опорного шарнира 7. Соответственно отключается и привод натяжения гибкой тяги 48. При этом достигнутое натяжение фиксируется посредством стопорной пластиQ ны 63, удерживающей храповую шестерню 65 (фиг. 8).
Далее осуществляются ремонтные процессы внутри цистерны. При этом для варианта мойки цистерны дости5 гается то преимущество, что возможна организация продольных ходов моечной головки, когда полностью исключается повторный проход участков поверхности и противотоки жидкостей. При
Q этом возможно применение контактных устройств очистки режущих струй на близком расстоянии и других технологических приемов.
С помощью клещевого захвата 8
5 можно менять рабочие органы, снимая одни и устанавливая другие.
Снятие и вывод консольных балок 5 и 6 производится в последовательности, обратной ходу их установки. При
0 движении клещевого захвата 8 вверх при ослабленном натяжении гибкой тяги 48 направляющая 78 разламывается на балочные отрезки 21-26, которые при выведении вновь образуют колонну из вертикально стоящих консольных балок 5 и 6.
При использовании пружинного привода натяжения (фиг. 13) все действия с установкой те же, что и в описанном варианте с лебедочным приводом натяжения. Отличия заключаются только в том, что пружинный привод натяжения обеспечивает автоматическое раскрытие под действием пружин при взаимодействии с частями цистерны. Указанный привод менее управляем, чем в первом случае, но более прост в изготовлении. Его целесообразно применять, когда нет необходимости в особо точной координации рабочих органов, например для мойки цистерн.
Изобретение позволяет обеспечить качественное и экономичное осуществление процесса мойки. Указанный процесс может быть проведен в раз- .личных режимах: гидродинамического разрушения, смывания, контактного воздействия режущей струей и т.д.
5
0
5
0
5
10
15
20
25
131480903
При этом достигается эффективный обход обрабатываемой поверхности без противотока моющей жидкости и продуктов мойки. Процесс регулирования по горизонтам может осуществляться горизонтальными проходами с постепенным опусканием вниз. На каждом горизонте параметры процесса регулируются .
Установка обеспечивает не только применение моечных аппаратов, но и любых других ремонтных рабочих органов по очистке, сварке, наплавке, напылению покрытий, окраске и т.д. Возможность применения разнообразных аппаратов обеспечивается особым расположением по оси цистерны, образованной консольными балками направляющей. Наличие такой направляющей обеспечивает высокую точность координирования рабочих органов. При работе установки достигается улучшение условий труда и высокая экологично сть процессов. Все рабочие органы можно эксплуатировать без присутствия внутри котла цистерны людей. Становится возможным применение гибких технологических комплексов по диагностике, мойке, очистке, нап- лавке и сварке, выполнение различных покрытий, осущестление разнообразных других технологических операций.
Таким образом, обеспечивается многоцелевое использование установки, как гибкого комплекса, для очистки, технического обслуживания и ремонта внутри котла цистерны.
Экономическая эффективность установки складывается из экономии затрат на моечные растворы и среды, экономии гидро- и энергетических ресурсов, повышения качества работ и, ак следствие, увеличения сроков службы цистерны.
Положительные свойства предложеной установки проявляются и в униерсальности ее для различных типов видов цистерн. Установка достаточ- о проста в изготовлении, эксплуатаии, может применяться и для других ипов емкостей с узкой горловиной ввода.
30
35
40
45
50
б р
ч г
ч к к к м м к с т ц ми по ны оп но на ны че га
Формула изобретения
1. Установка для очистки и ремонта емкостей, содержащая рабочий ор14
10
15
0
5
0
5
0
5
0
5
ган для очистки и ремонта с держателем, установленным на приводном фиксируемом механизме его перемещения и выполненным в виде трубчатой балки, отличающая ся тем, что, с целью расширения технологических возможностей, повышения качества очистки и ремонта, она снабжена опорным шарниром, клещевым захватом, дополнительными шарнирами, гибкой тягой с управляемым приводом натяжения, подвижным координатором, при этом держатель выполнен в виде двух консольных балок, соединенных между собой в верхней их части посредством опорного шарнира, связанного с клещевым захватом, а каждая из консольных балок выполнена в виде по меньшей мере двух балочных отрезков, связанных между собой посредством дополнительного шарнира и подпружиненных относительно опорного шарнира, при этом свободные концы консольных балок соединены между собой гибкой тягой с управляемым приводом натяжения, а рабочий орган связан с консольными балками посредством подвижного координатора.
2.Установка по п. 1, о т л и - . чающая ся тем, что управляемый привод натяжения гибкой тяги выполнен в виде приводного лебецочрого барабана, соединенного со средней частью указанной тяги, при этом тяга размещена внутри консольных балок.
3.Установка по п. отличающая ся тем, что гибкая тя га выполнена подпружиненной.
4.Установка по п. отличающая с я тем, что подвижный координатор снабжен охватывающим консольную балку опорным кольцом с круговой направляющей, прямолинейными направляющими, приводными роликами, установочным цилиндрическим кольцом, рабочим органом, шестернями с подпружиненными храповыми элементами, прерывателями электрической цепи и соединенными с ними счетчиками электрических импульсов, при этом по меньшей мере одна из прямолинейных направляющих выполнена зубчатой, опорное кольцо установлено с возможностью перемещения по прямолинейным направляющим и связано через приводные ролики с установочным цилиндрическим кольцом, причем рабочий орган установлен на установочном циV
линдрическом кольце, а прямолинейные направляющие посредством шестерен кинематически связаны с прерывателями электрической цепи.

| название | год | авторы | номер документа |
|---|---|---|---|
| Захват клещевой | 1973 |
|
SU486993A1 |
| Автоматическое грузозахватное устройство | 1979 |
|
SU893796A1 |
| Клещевая подача к горячештамповочному прессу | 1989 |
|
SU1690920A1 |
| Клещевая подача к горячештамповочному прессу | 1989 |
|
SU1639846A1 |
| Агрегат для резки листового проката | 1982 |
|
SU1046043A1 |
| МНОГОЯРУСНАЯ МЕХАНИЗИРОВАННАЯ АВТОСТОЯНКА | 1999 |
|
RU2188290C2 |
| ПЕРЕДВИЖНАЯ ШПАЛОПОДБИВОЧНАЯ И ВЫПРАВОЧНАЯ МАШИНА | 1988 |
|
RU2013483C1 |
| ПОГРУЗЧИК ПЕРИОДИЧЕСКОГО ДЕЙСТВИЯ | 1971 |
|
SU298111A1 |
| Устройство для укладки паллеты | 2018 |
|
RU2785653C2 |
| Установка для мойки емкостей | 1990 |
|
SU1741944A1 |

Изобретение позволяет расширить технологические возможности, повысить качество очистки и ремонта емкостей. Обработка емкостей производится при помощи рабочих органов, установленных на консольных балках, которые при установке их в рабочее положение образуют внутри емкости единую балку, которая служит осевой направляющей для перемещающихся по ней рабочих органов, которые в свою очередь могут быть сменными. Каждый сменный рабочий орган устанавливается на координаторе, снабженном приводом поступательного перемещения и поворота относительно направляющей, закрепляемой на днищах емкости. Консольные балки состоят из балочных отрезков, соединенных между собой дополнительными шарнирами с пружинящими вставками, вызывающих подъем соединяемых звеньев относительно опорного шарнира, соединяющего в нерабочем положении консольные балки в вертикальную колонну. Приведение в рабочее положение консольных балок производится при помощи гибкой тяги, соединенной с концами консольных балок и снабженной приводом натяжения, который предусматривается в виде лебедочного барабана или в варианте пружинной самофиксирующейся при вводе в емкость системы. 3 з.п. ф-лы, 18 ил.
Физ.1
f,
Фиг. 6
A-A
Фиг.З
6-6
Фиг.7
г
м
& 8138} 8 «
/
Sg 5S gj §
Х-иДХдй
t
n
хГ уГ 7777 А- &////////////////№
о
С
гх
f
Ј3
Ј- 00 О -0 О Ы
I
CO
I
з
Редактор В.Данко
Составитель А.Юдахин Техред М.Дидык
Заказ 2612/7
Тираж 536
ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-издательский комбинат Патент, г. Ужгород, ул. Гагарина, 101
Фие.18
Корректор М.Пожо
Подписное
| Установка для мойки емкостей | 1985 |
|
SU1278046A1 |
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
