Изобретение относится к машиностроению и может быть использовано в качестве захватного органа промышленного робота или манипулятора.
Цель изобретения - повьппение уров- ня очувствления и повышение надежности захвата.
На фиг.1 изображен схват, общий Вид; на фиг.2 - вид А на фиг.1; на фиг.З - узел I на фиг,1.tO
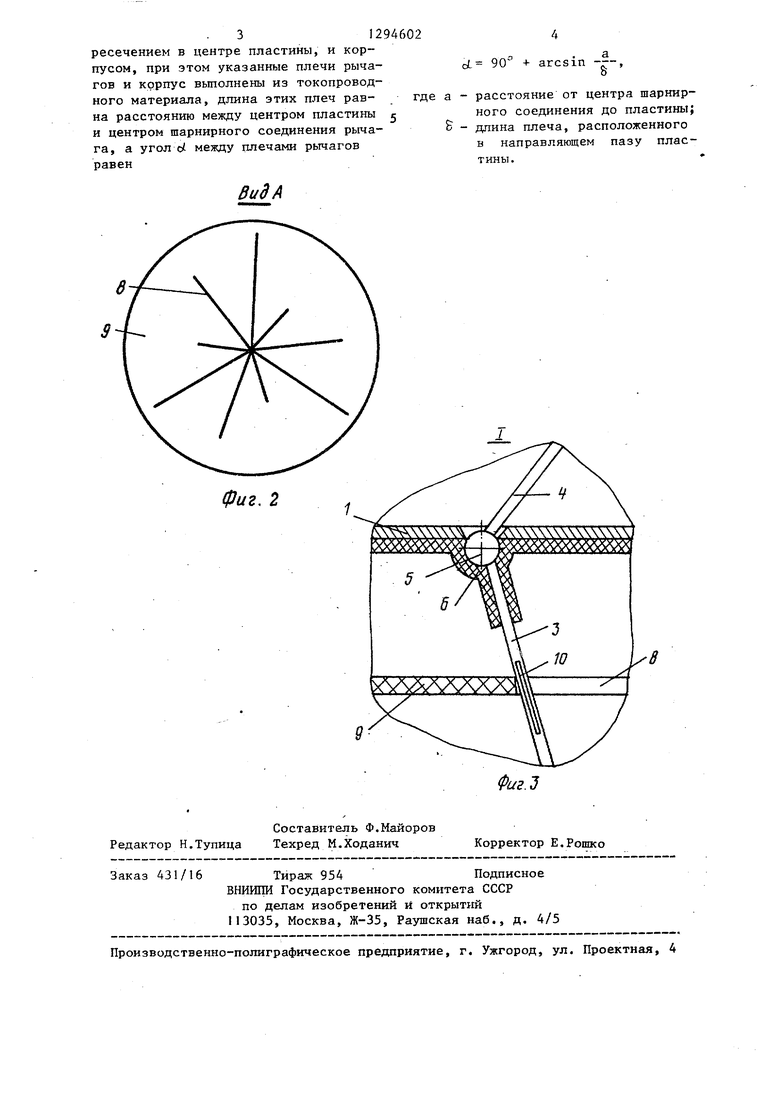
Очувствленный схват содерясит установленные в отверстиях корпуса 1 и шарнирно с ним связанные пальцы 2, выполненные в виде двуплечих рычагов С плечами 3 и 4, между которыми выполнена из нетокопроводного материала сферическая, часть 5, являющаяся подвижной частью шарнира. Сферическая часть 5 поджата оболочкой 6, выполненной из упругого токопроводного полимера, к кромке.отверстия в корпусе 1, образуя шарнирные соединения рычага с корпусом. Плечи 4 выполнены из ферромагнитного материала (напри15
20
расстояния от места крепления пальца в корпусе 1 до оси устройства, поэто му в исходном положений пальцы 2 остаются наклоненными к оси захвата.
Устройство работает следующим образом.
Перед захватом заготовки 11 (устройство предназначено преимущественно для захвата легких плоских деталей из непроводящих материалов типа печатных плат, пластмассовых колпачков и т.д.) устройство упирается в нее. При этом пальцы 2, которые входят в соприкосновение с заготовкой I15 поворачиваются в шарнирах и устанавливаются в центре пластины 9. Для осуществления захвата на электромагнитную катушку 7 подается постоянное напряжение. Плечи 4 пальцев стремятся расположиться вдоль магнитных линий катушки 7, т.е. параллельно ее оси, и разворачиваются пальцы вокруг шарниров. При этом плечи 3 всех па-пьцев, которые до
мер, железа, стали) и ра. внут-- этого не входят в соприкосновение с
ри неподвижно закрепленной в корпусе I электромагнитной катушки 7, Плечи 3 рычагов вьтолнены из токопроводного материала и размещены в направляющих пазах 8 пластины 9. Для предотвращения проворота вокруг своей оси на них выполнены лыски 10.
Углы d- между плечами 3 и 4 рычагов (фиг.I) составляют
d 90 +
arcsin ---} о
а - расстояние от центра сферы
до пластины 9;
S - длина плеча 3, равная рас- стоянию от места крепления
пальца в корпусе 1 до центра
пластины 9.
Плечи 3 пальцев соединены с первыми входами измерительных приборов (не показаны), вторые входы измерительных приборов соединены с корпусом 1. Выходы измерительных приборов соединены с входами блока управления робота (не показан), Все пазы 8 выполнены пересекающимися в центре пластины 9 (фиг.2). Упругая оболочка 6 является средством возврата пальцев 2 в исходное положение, так как стремится придать продетьпу в нее захватным гшечам 3 пальцев положение, параллельное оси устройства. Длина пазов 8 вьшолнена несколько меньше
расстояния от места крепления пальца в корпусе 1 до оси устройства, поэтому в исходном положений пальцы 2 остаются наклоненными к оси захвата.
Устройство работает следующим образом.
Перед захватом заготовки 11 (устройство предназначено преимущественно для захвата легких плоских деталей из непроводящих материалов типа печатных плат, пластмассовых колпачков и т.д.) устройство упирается в нее. При этом пальцы 2, которые входят в соприкосновение с заготовкой I15 поворачиваются в шарнирах и устанавливаются в центре пластины 9. Для осуществления захвата на электромагнитную катушку 7 подается постоянное напряжение. Плечи 4 пальцев стремятся расположиться вдоль магнитных линий катушки 7, т.е. параллельно ее оси, и разворачиваются пальцы вокруг шарниров. При этом плечи 3 всех па-пьцев, которые до
этого не входят в соприкосновение с
заготовкой, сходятся к оси устройства и зажимают ее. При повороте пальцев в местах крепления к корпусу 1 оболочка 6 деформируется и изменяются величины сопротивления между плечами 3 и корпусом 1. По величине сопротивлений, регистрируемых измерительными приборами и поступающих в блок управления робота, судят о по- ложении (угле наклона к оси) каждого пальца, что позволяет с высокой точностью определить размеры, форму и местоположение предмета.
Формула изобретения
Очувствленный схват, содержащий корпус, в отверстиях которого шарнирно установлены пальцы, выполненные в виде двуплечих рычагов с приводом их ; поворота, ус1тановленным в корпусе, и пластину с направляющими пазами, в
которых расположены плечи рычагов с рабочей поверхностью, отличающийся тем, что, с целью повышения уровня очувствления и повьш1ения надежности захвата, шарнирное соединение каждого рычага включает подвижную часть сферической формы, выполненную из нетокопроводного материала, и оболочку из упругого токопроводного полимера, охватывающую подвижную часть и установленную между плечами рычагов, распох оженнымк в направляющих пазах пластины, вьшолненных с пе31294602
ресечением в центре пластины, и корпусом, при этом указанные плечи рычагов и корпус вьтолнены из токопровод- ного материала, длина этих плеч равна расстоянию между центром пластины и центром шарнирного соединения рычага, а угол ot между плечами рычагов равен
гд
ВидА
dL 90
+ arcsin -r, о
а - расстояние от центра шарнирного соединения до пластины; & - длина плеча, расположенного в направляющем пазу пластины.
Редактор Н.Тупица
Составитель Ф.Майоров Техред М.Ходанич
431/16
Тираж 954Подписное
ВНИШШ Государственного комитета СССР
по делам изобретений ri открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
fe.J
Корректор Е.Рошко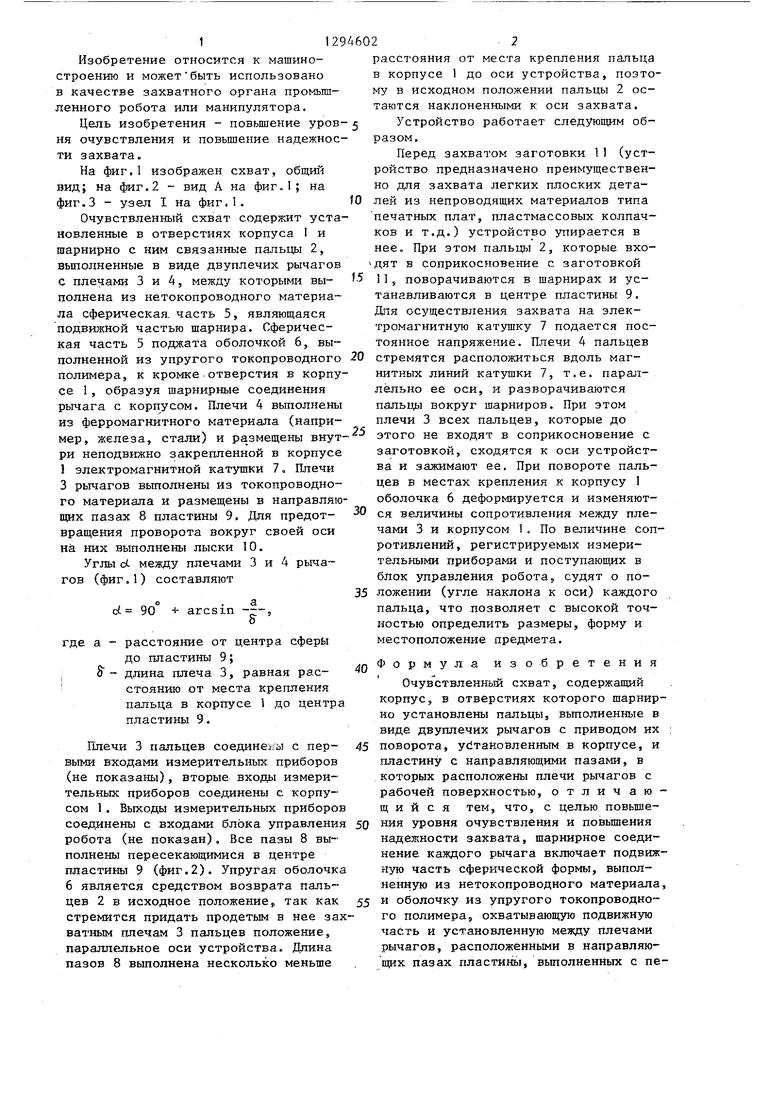
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват | 1986 |
|
SU1335450A1 |
| Схват очувствленного робота | 1984 |
|
SU1232475A1 |
| Захватное устройство | 1981 |
|
SU986779A1 |
| Схват манипулятора | 1986 |
|
SU1351778A2 |
| Схват промышленного робота | 1985 |
|
SU1305031A1 |
| Схват | 1983 |
|
SU1119842A1 |
| Очувствленный схват промышленного робота | 1988 |
|
SU1593956A1 |
| Робототехнологический комплекс | 1985 |
|
SU1271742A1 |
| ПРИВОД СХВАТА МАНИПУЛЯТОРА | 2008 |
|
RU2378102C2 |
| Устройство для подачи заготовок и удаления изделий из штампа | 1989 |
|
SU1738440A1 |
Изобретение относится к машиностроению, и может быть использовано в качестве захватного органа промьш- ленного робота или манипулятора. Целью изобретения является повьшение уровня очувствления и надежности захвата. Перед захватом заготовки 11 схват упирается в нее, при этом пальцу. 2, выполненные в виде, двуплечих рычагов с плечами 3 и 4, которые входят в сопрйкосновеьше с заготовкой 11 плечами 3, поворачиваются в шарнирах, охваченных оболочкой 6, вьтол- ненной из упругого токопроводного полимера, и устанавливаются в центре пластины 9. В пазах последней размещены плечи 3. корпус 1 и плечи 3 выполнены из токопроводного материала, Для осуществления захвата на электро- магнитз1ую катушку 7 подается постоянное напряжение. Плечи 4 стремятся расположиться вдоль силовых магнитных линий катушки 7 и разворачивают пальцы вокруг шарниров. При этом плечи 3 всех пальцев, которые до этого не входят в соприкосновение с заготовкой 11, сходятся к оси устройства и зажимают ее. По величине изменения электрического сопротивления оболочки 6, возникшего в результате ее деформации, судят о положении пальцев и, следовательно, форме заготовки II. 3 ил. с сл ьэ со Oi о ГС фаг. /
| Захватное устройство | 1981 |
|
SU986779A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
