Изобретение относится к горной гфомьшшенности и может быть использовано для создания систем автома тического управления движением очистньгх комбайнов. Известен способ автоматического управления горной машиной, включающий контроль открытой границы порода-уголь и отвод исполнительного органа от породы после врезания рез цов в породу l2 . Недостатком способа является низ кая точность управления, обусловлен ная тем, что информация о положении комбайна относительно границ пласта поступает только при врезании резцов в породу. При удалении комбайна от границы вследствие увеличения мощности пласта, подштыбовки конвейера информация о положении комбайна перестает постзгпать и зтФа Ление становится практически невозможным. Наиболее близким к изобретению по технической сущности и достигаемому результату является способ автоматического управления очистным ксмбайном, заключающийся в периодическом принудительном приближении исполнительного органа к породе контакте измерительного резца с породой , контроле границы порода-угол и в изменении положения исполнительного органа в соответствии с заданной величиной оставляемой угол ной пачКи 2 . Однако известньй способ отличает ся недостаточной точностью управления, обусловленной тем, что при поперечном наклоне комбайна относительно плоскости пласта у границы с породой остается пачка угля переменной толщины. В силу несовпадения формируемого после прохода комбайна рельефа с реальными условиями залегания пласта присекается порода, не полностью вынимается уголь и за счет наличия пачки переменной толщины у почвы создаются условия для нестабильной по величине подштыбовки Конвейера, что в свою очередь является причиной скучивания рештаков последнего, снижающего его эксплуатационнзто надежность, и даль нейшего увеличения поперечного угла наклона комбайна. Цель изобретения - повьшение точ ности управления за счет компенсации изменения гипсометрии пласта в направлении подвигания забоя. I . Поставленная цель достигается тем, что согласно способу автоматического управления очистным комбайном, заключающемуся в периодическом принудительном гфиближении исполнительного органа к породе, контакте измерительного резца с породой, контроле Границы порода-уголь и в изменении положения исполнительного органа в соответствии с заданной величиной оставляемой угольной пачки, в контакт с породой вводят два пр одольно-диаметрально-противоположных измерительных резца, измеряют время контакта с породой каждого из них, определяют разность времен контактов ив зависимости от величины и знака рассогласования изменяют угол наклона комбайна от- . носительно его продольной оси и кЬр-, ректирзтот положение исполнительного , органа. На чертеже изображена блок-схема системы автоматического управления, реализующей предлагаемый способ. Система состоит из датчика 1 пути комбайна, выход которого через блок 2 управления исполнительным органом связан с входом электрогидррпривода 3 исполйительного органа, механически связанного с исполнительным органом 4 очистного комбайна. Исполнительньй орган 4 связан с датчиком 5 порода-уголь, а выход последнего через первый блок 6 коммутации, к которому подключен синхронизатор 7, связан с входами первого 8 и второго 9 блоков интегрирования. Второй вход первого блока 6 коммутации связан с выходом синхронизатора 7. Блоки 8 и 9 интегрирования через блок 10 вычитания и непосредственно связаны с входами второго блока 11 коммутации. Выходы второго блока 1t коммутация связаны с входом блока 2 управления исполнительньм органом и через блок 12 управления наклоном корпуса с электрогидроприводом 13 опоры комбайна, который механически связан с корпусом 14 очистного комбайна, а через корпус - с исполнительным органом 4. Второй выход блока 12 управления наклоном корпуса связан с входом второго блока 11 коммутации.
СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ОЧИСТНЫМ КОМБАЙНОМ, заключающийся в периодическом принудительном приближении исполнительного органа к породе, контакте измерительного резца с породой, контроле границы порода-зп оль и в изменении положения исполнительного органа в соответствии с заданной величиной оставляемой угольной пачки, отличающийся тем, что, с целью повышения точности управления за счет компенсации изменения гипсометрии пласта в направлении подвигания забоя, в контакт с породой вводят два продол-ьно-диаметрапьно-противоположных измерительных резца, измеряют время контакта с породой каждого из них, определяют разность времен- контактов ив зависимости от величины и знака рассогласования изменяют угол наклона комбайна относительно его продольной оси и корректируют положение исполнительного органа. :о со со со 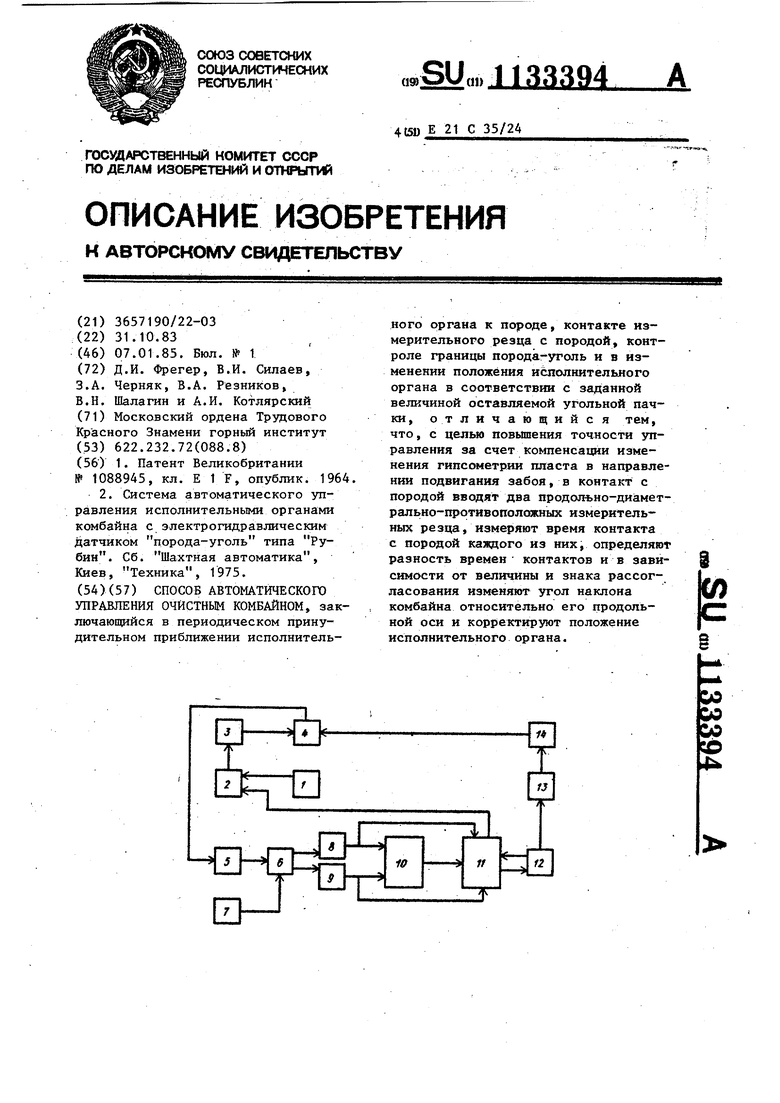
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство возврата регистрирующего органа к печатающему аппарату | 1982 |
|
SU1088945A1 |
| Е IF, опублик | |||
| Прибор для заливки свинцом стыковых рельсовых зазоров | 1925 |
|
SU1964A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Система автоматического управления исполнительными органами комбайна с электрогидравлическим датчиком порода-уголь типа Рубин | |||
| Сб | |||
| Шахтная автоматика, Киев, Техника, 1975 | |||
