Изобретение относится к испытательнрму оборудованию и может быть использовано для испытаний объектов i различного назначения.
Известен имитатор моментов инерции , содержащий кардановый подвес с внешней и внутренней рамками для установки объекта-гироскопа, привод вращения внешней рамки и датчик угловой -скорости вращения объекта вокруг оси, имитации момента инерции t.i3Недостатком имитатора является то, что он не может быть применен для имитации пространственного движения в связи с тем, что позволяет следить за движениями объекта только вокруг оси имитации момента инерции.
Наиболее близким к изобретению по технической сущности является имитатор моментов инерции относительно трех взаимно перпендикулярных осей, содержащий датчики углового движения объекта: три датчика углового ускорения объекта, два датчика угловой скорости объекта - в карданрвом подвесе с внешней и внутренней рамками для установки объекта приводы вращения рамок, механизм углового движения объекта, пыполиенный в виде маховика
с приводом, датчик угловой скорости маховика, а также, счетно-решающее устройство, вход которого связан с датчиками, а выход - с приводами .
Однако известный.имитатор имитирует только мсменты инерции и н учитывает взаимную перекрестную связь . от одновременного вращения объекта относительно трех главных Ьсей инер10ции.
Целью изобретения является повышение эффективности за счет приближения имитируемых условий к реальным.
Поставленная цель достигается тем,
15 что имитатор моментов инерции объекта, содержащий механизм углового движения объекта и датчики углового движения последнего, снабжен тремя усилителями, входы которых соединены с
20 выxoдa iи датчиков, а механизм углового движения выполнен в виде трех маховиков с приводами, связываемых с объектом по осям координат и соединенных с выходёили усилителей.
25
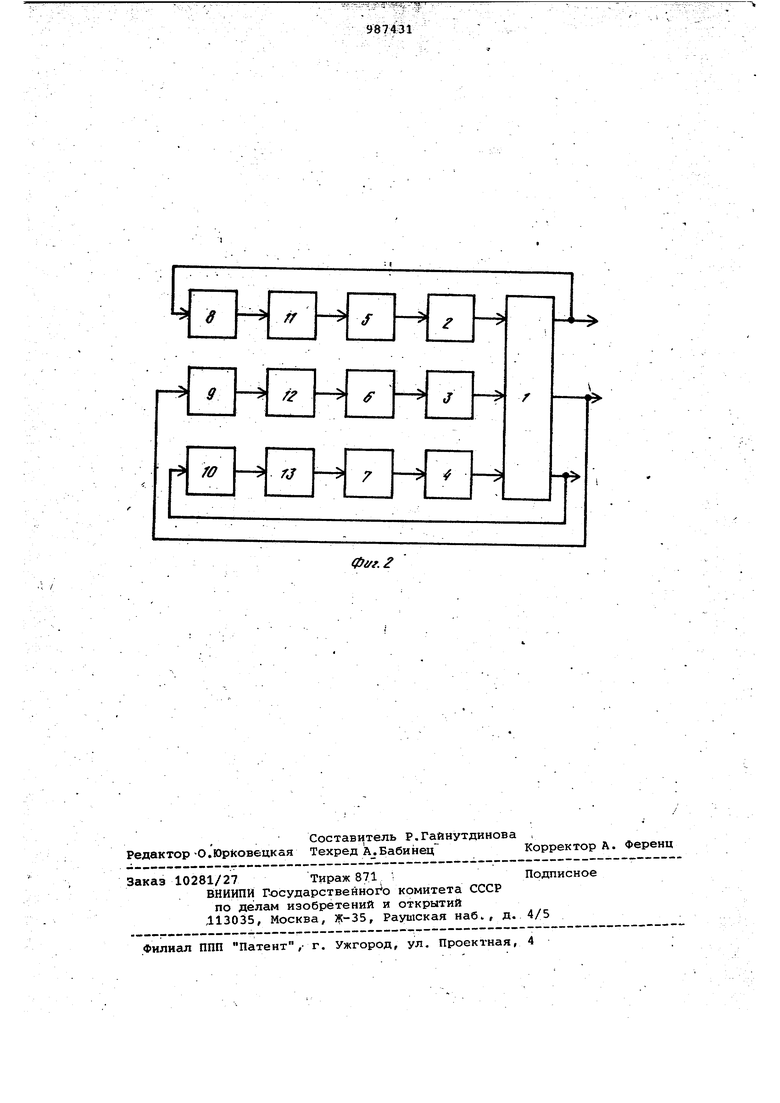
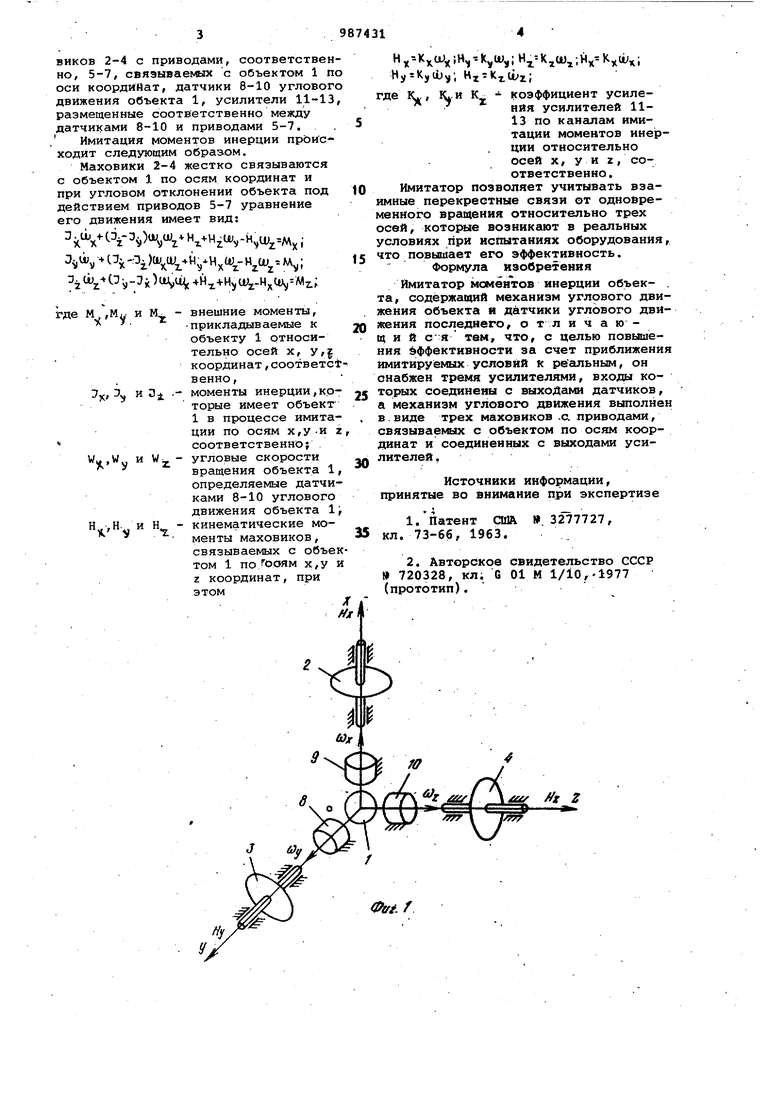
На фиг. 1 изображена кинематическая схема имитатора, на фиг. 2 блок-схема имитатора.
Имитатор моментов инерции содержит механизм-углового движения объек30та 1, выполненный в виде трех маховиков 2-4 с приводами, соответствен но, 5-7, связываемых с объектом 1 п оси координат, датчики 8-10 угловог движения объекта 1, усилители размещенные соотнетственно между датчиками 8-10 и приводами 5-7, . Имитация моментов инерции происходит следующим образ-ом. Маховики 2-4 жестко связываются с объектом 1 по осям координат и при угловом отклонении объекта пол действием приводов 5-7 уравнение его движения имеет вид: ,-H,,,Mx i , ч p -:)(.H. , :2 r y- к Ч Ч x+н Уz-Mx «v- 2:; где М ffiu -f внешние моменты, -прикладываемые к объекту 1 относительно осей X, у,5 координат,соответс венно. Х-N и «i моменты инерции,кр торые имеет объект 1 в процессе имита ции по осям х,у-и соответственно; Wu,W и Wy - угловые скорости вращения объекта 1 определяемые датчи ками 8-10 углового движения объекта 1 Н,Н и Н - кинематические мо менты маховиков, связываемых с объе том 1 поТооям х,у Z координат, при этом (.К,ш,;Н.--К со ;Нх-К и;х; H tK ti-r; где к.., ,и К- коэффициент усиления усилителей 1113 по каналам имитации моментов инерции относительно осей X, у и Z, соответственно. Имитатор позволяет учитывать взаимные перекрестные связи от одновременного вращения относительно трех осей, которые возникают в реальных условиях при испытаниях оборудования, что повышает его эффективность. Формула изобретения Имитатор моментов инерции объек- . та, содержащий механизм углового движения объекта и датчики углового движения последнего, о т л и ч а ю щ и и Ся тем, что, с целью повышения эффективности за счет приближения имитируемых условий к регшьным, он снабжен тремя усилителями, входы которых соединены с выходами датчиков, а механизм углового движения выполнен в. виде трех маховиков ,с. приводами, связываемых с объектом по осям координат и соединенных с выходами усилителей. Источники информации, принятые во внимание при экспертизе 1.патент США 3277727, кл. 73-66, 1963. 2. Авторское свидетельство СССР 720328, кл; G 01 М 1/10,1977 (прототип).
0i/f.2
| название | год | авторы | номер документа |
|---|---|---|---|
| Имитатор моментов инерции | 1977 |
|
SU720328A1 |
| СПОСОБ НАЧАЛЬНОЙ ОРИЕНТАЦИИ КОСМИЧЕСКИХ АППАРАТОВ | 2000 |
|
RU2180729C2 |
| Способ испытаний систем и приборов космического назначения в условиях имитации невесомости | 2023 |
|
RU2823384C1 |
| СТЕНД МОДЕЛИРОВАНИЯ ПОВЕДЕНИЯ ДИНАМИЧЕСКИХ СИСТЕМ С ОБРАТНОЙ СВЯЗЬЮ НА ПРИМЕРЕ СИСТЕМЫ ОДНООСНОЙ СТАБИЛИЗАЦИИ И ОРИЕНТАЦИИ СПУТНИКА | 2023 |
|
RU2829476C1 |
| Моделирующий комплекс для отладки системы управления автономным подвижным объектом | 2017 |
|
RU2662331C1 |
| Способ идентификации тензора присоединенных моментов инерции тела и устройство для его осуществления | 2018 |
|
RU2688964C1 |
| ПРЕЦИЗИОННЫЙ ГИРОСТАБИЛИЗАТОР | 2009 |
|
RU2417352C1 |
| Устройство полунатурного моделирования системы управления беспилотным летательным аппаратом с радиолокационным визиром | 2015 |
|
RU2629709C2 |
| СИСТЕМА ВИЗУАЛИЗАЦИИ | 2006 |
|
RU2325706C1 |
| Имитатор радиолокационных целей | 2021 |
|
RU2787576C1 |