Прецизионный гиростабилизатор (ПГС) относится к области навигационной техники и может найти применение при построении гиростабилизированных платформ в системах управления.
К настоящему времени известны гироскопические стабилизаторы силового и индикаторного типов, построенные на базе классических и вибрационных гироскопов [1-2]. Известны также лазерные гироскопы, широко используемые в последнее время в качестве датчиков угловых скоростей [1]. Их общим недостатком является то, что для них характерен систематический дрейф по измеряемым угловым скоростям. Они технологически сложны, особенно, с точки зрения построения систем датчиков и приемников сигналов. За аналог-прототип выбрана схема классического гиростабилизатора непосредственного типа, который представляет собой обычный трехстепенной гироскоп с установленным на внешней рамке объектом, нуждающимся в стабилизации. Основные элементы аналога-прототипа: гиромотор, внешняя и внутренняя рамки, объект стабилизации.
Технический результат - повышение точности и быстродействия в создании инерциальной системы координат, обеспечение угловой стабилизации по двум взаимно перпендикулярным осям и уменьшение габаритно-весовых характеристик прибора в целом.
Технический результат достигается уникальной оригинальностью конструкции ротора аналога-прототипа, заключающейся в том, что на роторе размещен датчик команд угловых скоростей, выполненный на основе пьезокристаллов и размещенный строго на оси вращения ротора гироскопа.
Устройство поясняется чертежами: на фиг.1 приведена кинематическая схема ПГС, на фиг.2 изображено принципиальное устройство чувствительного элемента датчика команд.
Прецизионный гиростабилизатор (фиг.1) представляет собой классический трехстепенной гироскоп с ротором обращенного типа 1, по осям подвеса которого размещены датчик момента 5 (ДМ) и стабилизирующий двигатель 6 (СД). Ротор ДМ закреплен на оси внутренней рамки 16, статор - на оси внешней рамки 15, обладающих определенной жесткостью.
ПГС имеет по двум взаимно перпендикулярным экваториальным осям инерции (X и Y) по две полости в виде сфер или цилиндров 10 (фиг.2), размещенных диаметрально противоположно. Внутренние объемы сфер (цилиндров) заполнены жидкостью 11. В месте пересечения полостей размещен поплавок 14 датчика команд угловых скоростей (ДК), соединенный жесткой связью 13 с пьезокристаллами 12.
Воздействующим элементом на датчик команд угловых скоростей 4 является жидкость 11. Удельная массовая плотность жидкости (ρж) должна быть больше удельной плотности поплавка 14 (ρп). Для обеспечения наименьшего сопротивления протеканию жидкости поплавки изготавливаются в форме пустотелых шариков или эллипсоидов вращения.
Пьезокристаллы 12 датчика команд угловых скоростей 4, расположенные в двух перпендикулярных полостях 10, электрически связываются друг с другом последовательно и согласно, что позволяет повысить величину выходного сигнала датчика в два раза. Пьезокристаллы изготавливаются в форме прямоугольных пластин, один конец которых жестко закреплен с поплавком 14, второй - с внутренней частью полости ротора 1.
Датчик команд угловых скоростей 4 электрически связывается с роторными обмотками преобразователя координат 3 (ПК), т.е. с обмотками, размещенными непосредственно на оси вращения ротора 1 гироскопа. Сигналы с ПК через усилители 8, 9 (Уст X, Уст Y) подаются соответственно на стабилизирующий двигатель 6 и датчик момента 5, чем достигается стабилизация оси вращения ротора 1 гироскопа, т.е. двухкоординатная стабилизация прибора в целом.
Принцип работы ПГС заключается в следующем. При вращении ротора гироскопа 1 поплавок датчика команд угловых скоростей 4 занимает нейтральное положение и с него не поступает сигнал. Под действием моментов внешних сил, приложенных вдоль осей внутренней 16 или наружной 15 рамок гироскопа, ротор 1 начинает прецессировать, чем вызывается появление сил, действующих с двойной частотой вращения ротора гироскопа на жидкость ДК, а следовательно, и на поплавок датчика. Далее сигналы с датчика команд угловых скоростей 4 через преобразователь координат 3, усилители (Уст X, Уст Y) подаются на СД и ДМ, чем достигается устранение возмущающего воздействия, повышение чувствительности гироскопа и обеспечение систематического ухода осей подвеса гироскопа с точностью выше  (дуг.сек/мин).
(дуг.сек/мин).
Преобразователь координат 3 позволяет разделить управляющий сигнал пропорционально проекциям главного вектора возмущающего момента на соответствующие оси внешней 15 и внутренней 16 рамок и образовать новые цепи управления по этим осям, т.е. две выходные обмотки преобразователя координат размещены неподвижно на оси, относительно которой вращается ротор 1 гироскопа, и электрически связаны: одна через усилитель-преобразователь со стабилизирующим двигателем 6, другая через усилитель-преобразователь с датчиком моментов 5 по оси прецессии.
Используется схема съема сигналов, когда каждая пара пьезокристаллов 12, размещенная по диаметру ротора 1 гироскопа, электрически согласована между собой и с одной из роторных обмоток преобразователя координат 3, которые закреплены неподвижно непосредственно на вращающемся роторе 1 гиромотора.
Приведенная схема работы позволяет использовать абсолютные кинематические параметры движения главной оси ротора, а не относительные и с помощью однороторного гироскопа осуществить двухкоординатную стабилизацию объекта относительно инерциальной системы отсчета.
Требуемая величина кинетического момента, коэффициенты вязкого трения, моменты инерции по осям подвеса регулируются коэффициентами передачи цепей стабилизации, вследствие чего отпадает необходимость в выборе гироскопов с большими кинетическими моментами и выведении дополнительных законов управления.
При использовании указанного устройства необходимо учитывать вполне определенные соотношения между жесткостью (модулем упругости) пьезокристаллов и моментом выталкивающей силы, который образуется при отклонении поплавка на некоторый угол φ.
Предлагаемое устройство работоспособно, не требует особых технологических подходов для конструктивной реализации, может быть изготовлено малогабаритным, обеспечивает угловую стабилизацию одновременно по двум взаимно перпендикулярным осям и повышает чувствительность гироскопа.
Источники информации:
1. Магнус К. Гироскопы. - М.: Мир, 1974. - 512 с.
2. Каргу Л.И. Точность гироскопических устройств систем управления летательных аппаратов. - М.: Машиностроение, 1990. - 208 с.

Изобретение относится к относится к области навигационной техники и может найти применение при построении гиростабилизированных платформ в системах управления. Прецизионный гиростабилизатор содержит ротор обращенного типа с системой стабилизации и разгрузки моментов, действующих по осям внешней и внутренней рамок. Ротор имеет конструктивные особенности, в котором по взаимно перпендикулярным экваториальным осям инерции, на некотором, но равном удалении от оси вращения выполнены четыре выемки в форме сфер или цилиндров, заполненных жидкостью, в которых размещены поплавки, скрепленные через пьезокристаллы с внутренней частью основы ротора, при этом каждая пара пьезокристаллов, размещенная по диаметру ротора гироскопа, электрически согласована между собой и с одной из роторных обмоток преобразователя координат, которые закреплены неподвижно непосредственно на вращающемся роторе гиромотора. Технический результат - повышение точности и быстродействия в создании инерциальной системы координат, обеспечение угловой стабилизации по двум взаимно перпендикулярным осям и уменьшение габаритно-весовых характеристик прибора в целом. 2 ил.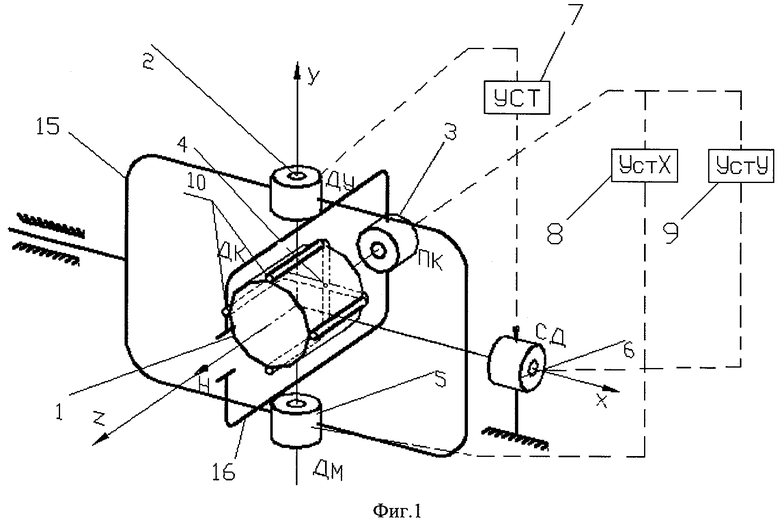
Прецизионный гиростабилизатор (ПГС) с ротором обращенного типа и системой стабилизации и разгрузки моментов, действующих по осям внешней и внутренней рамок, отличающийся тем, что имеет конструктивные особенности ротора, в котором по взаимно перпендикулярным экваториальным осям инерции, на некотором, но равном удалении от оси вращения выполнены четыре выемки в форме сфер или цилиндров, заполненных жидкостью, и с размещенными в них поплавками, скрепленными через пьезокристаллы с внутренней частью основы ротора гироскопа, при этом каждая пара пьезокристаллов, размещенная по диаметру ротора гироскопа, электрически согласована между собой и с одной из роторных обмоток преобразователя координат, которые закреплены неподвижно непосредственно на вращающемся роторе гиромотора.
| Одноосный силовой горизонтальный гиростабилизатор | 1979 |
|
SU790923A1 |
| RU 2073206 C1, 10.02.1997 | |||
| JP 2008003017 A, 10.01.2008. | |||

