1
Изобретение относится к испытательному наземному оборудованию.
Известны имитаторы моментов инерци предназначенные для имитации момента инерции объекта относительно соответствующей оси, содержащие датчик углового ускорения объекта и исполнительное устройство, имитирующее необходимый момент инерции.
Известен имитатор моментов инерции, содержащий гироскоп с тремя степенями свободы, установленный в кардановом подвесе, имеющем внутреннюю и внешнюю рамки, датчик угловой скорости врашения объекта вокруг оси, относительно которой имитируют момент инерции, привод вращения внещней рамки карданового подвеса гироскопа ij .
Известный имитатор моментов инерци гложет имитировать моменты инерции только относительно одной оси объекта, что затрудняет представление о враша- тельном движении объекта относительно трех взаимноперпевдикулярных осей.
Целью изобретения является повьнцение эффективности испытаний объекта за счет приблил.ения имитируемых условий испытатй- к реальным путем имитации моментов инерции одновременно относительно трех взаимноперпе1адикулярнъ1х осей объекта.
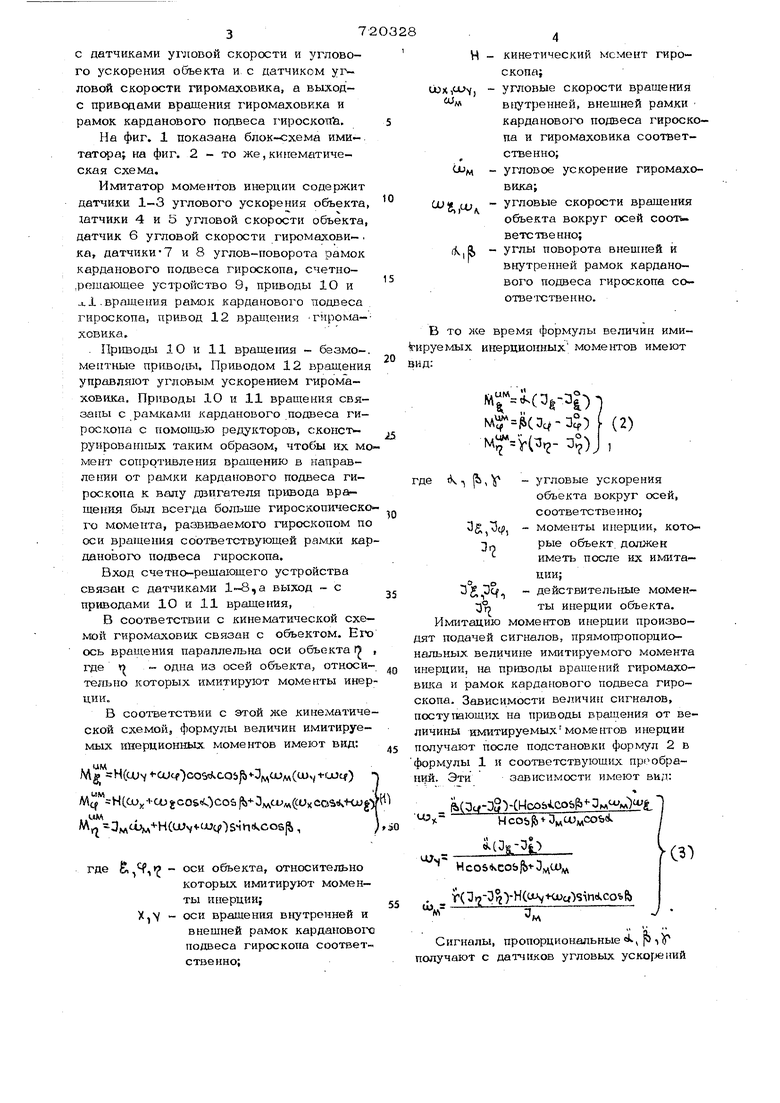
Указанная цель достигается тем, что в извест 1Ый имитатор моментов инерции, содержащий гироскоп с тремя степенями свободы, установленный в карданном подвесе, имеющем внутреннюю и внешнюю рамки, датчик угловой скорости вращения объектов вокруг оси, относительно которой имитируют момент инерции, при5вод вращения внеишей рамки карданового подвеса гироскопа, введен дополнительнъ1й датчшх угловой скорости объекта, датчики углового ускорения объекта, гиромаховпк с приводом вращения, датОчик угловой скорости гиромпховика, привод вращения внутренней рамки кардано- вого подвеса гироскопа и счетно-решающее устройство, вход которого связан С датчиками угловой скорости и углового ускорения объекта и- с датчиком угловой скорости гиромаховика, а вы;ходс приводами вращения гиромаховика и рамок карданового подвеса гироскопа. На фиг, 1 показана блок-схема ими- татора; на фиг. 2 - то же, кинематическая схема. Имитатор моментов инерции содержит датчики 1-3 углового ускорения объекта датчики 4 и 5 угловой скорости объекта датчик 6 угловой скорости гиромахови- , ка, датчики-7 и 8 углов-новорота рамок карданового нодвеса гироскопа, счетнорешающее устройство 9, приводы 10 и а..вращения рамок карданового подвеса гироскопа, привод 12 вращения гиромаховика. . Приводы 10 и 11 вращения - базмоментные пр1шоды. Приводом 12 вр.ащения управляют угловым ускорением гиромЪxoBHK i. Приводы 10 и 11 вращения связаны с рамками карданового .подвеса гироскопа с помовдэЮ редукторов, сконструированных таким образом, чтобы их м мент сопротивления вращению в направлении от рамки карданового подвеса гироскопа к валу двигателя привода вращения был всегда больше гироскопическо го Момента, развиваемого гироскопом п оси вращения соответствующей рамки ка данового нодвеса гироскопа. Вход счетно-решающего устройства связан с датчиками 1-8,а выход - с приводами 10 и 11 вращ;ения, В соответствии с кинематической схе мой гиромаховик связан с объектом. Ег ось вращения параллельна оси объекта П где п - одна из осей объекта, относи тельно которых имитируют моменты ине ции, В соответствии с этой же кинематиче ской схемой, формулы величин имитируемых инерционных моментов имеют вид: Н(ои COcf Coe f COalvlO CJUMCUJ,; t-fjJtf) ( I Ov UJMCfyxCO tk-KjUg им fl OM Mwv H{u;v -txjq )Sih., где 6,4, - оси объекта, относительно которъ1х имитируют моменты инерции; Х, - оси вращения внутренней и внещней рамок кардановотх подвеса гироскопа соответ ственно; Н - кинетический момент гироскопа;jx,, - угловые скорости вращения ВЕгутренней, внещней рамки карданового подвеса гироскопа и гиромаховика соответственно;м - угловое ускорение гиромаховика;CXJW LU угловые скорости вращения объекта вокруг осей COOTS- ветственно; д;, и, - углы поворота внещней и внутренней рамок карданового подвеса гироскопа соотвеixiTBe н но. то лее время формулъ величин имиемых инерционных моментов имеют (3g-з| л () ( (2) M:. )J 1 tk (Ь, V -угловые ускорения объекта вокруг осей, соответственно; -моменты инерции, которые объект должен иметь после их имитации;. -действительные моменты инерции объекта. Имитацию моментов инерции произвоподачей сигналов, прямонропорциоьных величине имитируемого момента рции, lia приводы вращений гиромахоа и рамок карданового подвеса гиропа. Зависимости величин сигналов, ту 1ИЮЩИХ на приводы вращения от веины имитируемых моме ЕПов инерции учают после подстановки формул 2 в мулы 1 и соответствующих прообра. Этизависимости имеют вид: « (Зс/-эЗ СИсоЬ11соь|Ь -3 и д)ш| .НсОЬ))+3„СимСОЫ iiis.:2il Нс054чСОЬ) , r() Сигналы, пропорциональные « ( р i учают с угловых уско1№иий
объекта, пропорциональные tugjCuq с датчиков угловых скоростей объекта, пропорциональные - с датчика угловой скорости гиромаховика, пропорциональные i - с датчиков угла поворота рамок карданового подвеса гироскопа. Остальные сигналы, входящие в формулы 3, формируют в счетно-решающем устройстве. Так же осуществляют и все алгебраические действия.
При использовании описанного изобретения повышается эффективность испытаний объекта за счет приближения имитируемых условий испытаний к реальным.
Формула изобретения
Имитатор моментов инерции, содержащий гироскоп, установленный в кардановом подвесе с внутренней и внещней рамками, датчик угловой скорости вращения объекта вокруг оси имитации Момента инерции, привод врлщения БНОШПСЙ рамки карданового подиеса гироскопа, отличающийся том, что, с целью повышения эффективности испытаний
5 объекта за счет приближения имитируемых условий испытаний к реальным, в него введен дополнительный датчик угловой скорости объекта, датчики углового ускорения объекта, гиромаховик, с приводом, датчик-угловой скорости гиромаховика, привод вращения внутренней рамки карданового подвеса, гироскопа и счетно-рещающее устройство, вход которого связан с датчиками угловой скорости и углового ускорения объекта и с датчиком угловой скорости гиромаховика а выход связан с приводами вращения гиромаховика и раМок карданового подвеса гироскопа.
20
Источники информации, принятые во внимание при экспертизе
1, Патент США № 3.277.727, кл, 73-66 от 1963 (прототип).