(54) СИСТЕМА УПРАВЛЕНИЯ МАНИПУЛЯТОРОМ
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления дистанционным манипулятором | 1986 |
|
SU1355481A1 |
| Система управления манипулятором | 1978 |
|
SU729545A1 |
| Устройство для управления астатическим манипулятором | 1982 |
|
SU1037206A1 |
| Устройство для управления дистанционным манипулятором | 1988 |
|
SU1650427A2 |
| Устройство для управления манипулятором | 1984 |
|
SU1229728A1 |
| Устройство для управления копирующим манипулятором | 1981 |
|
SU987573A1 |
| Интерактивная система управленияРОбОТОМ | 1979 |
|
SU798713A1 |
| Привод для сустава задающего органа копирующего манипулятора | 1974 |
|
SU511201A1 |
| Устройство для управления адаптив-НыХ РОбОТОМ | 1979 |
|
SU834667A1 |
| Устройство для управления манипулятором | 1983 |
|
SU1101786A1 |
1
Изобретение относится к робототехнике и может быть использовано при создании систем управления звеном манипулятора.
Известна система управления манипулятором, содержащая приводы задающего и исполнительного органов, датчики положения задающего и исполнительного органов и усилители 1.
Однако она имеет, больщие вес и габариT i задающего органа.
Наиболее близким техническим решением к изобретению является система, содержащая по каждой управляемой координате последовательно соединенные датчик положения задающего органа, привод, связанный кинематически через датчик момента исполнительного органа с датчиком положения исполнительного органа, первый выход которого подключен ко второму входу привода 2.
Недостатком этой системы является отсутствие возможности дозирования оператором усилий, развиваемых исполнительным органом, и, как следствие, невозможность в общем случае манипулировать объектами, на которые наложены внещние связи.
Цель изобретения - расширение области применения системы.
Цель достигается тем, что система содержит последовательно соединенные датчик усилий оперд,тора и блок вычисления зоны нечувствительности и по каждой регулируемой координате- функциональный преобразователь, первый вход которого подключен к соответствующему выходу блока вычисления зоны нечувствительности,второй вход - к выходу датчика момента исполнительного органа, а выход - к третьему входу привода, вторые входы блока вычисления зоны нечувствительности соединены с выходом каждого датчика положения .задающего органа, а третьи входы - со вторым выходом каждого датчика положения исполнительного органа.
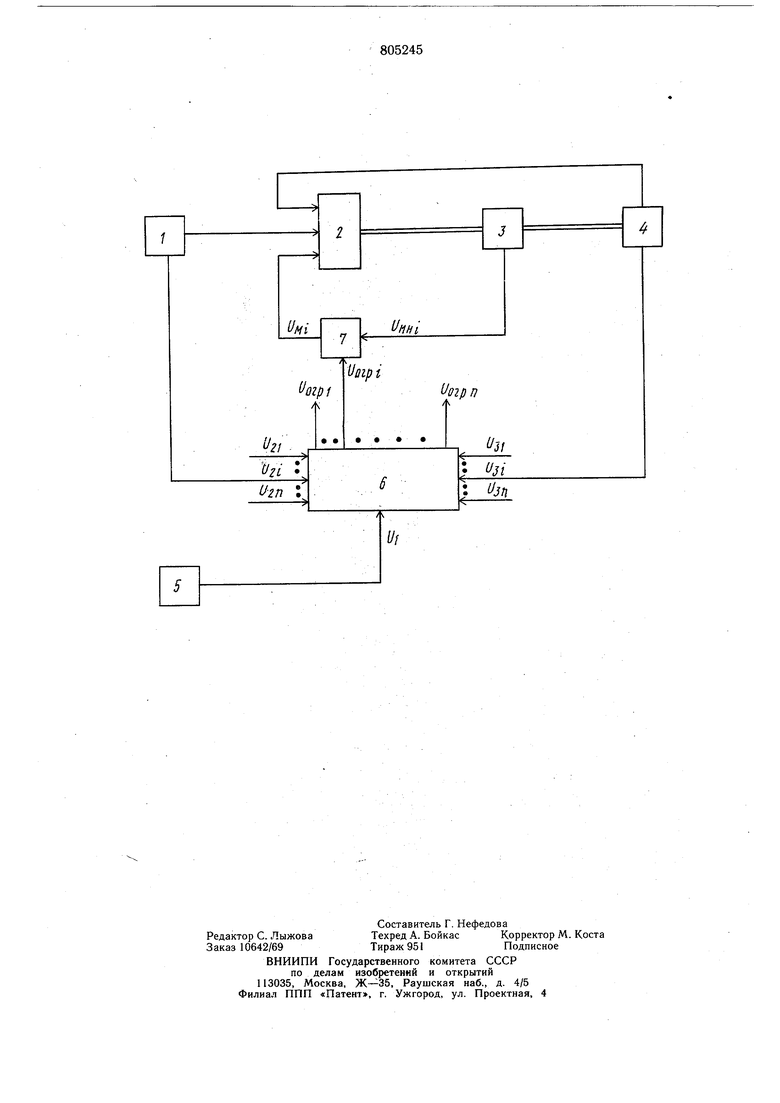
На чертеже представлена блок - схема системы.
Схема содержит датчик 1 положения задающего органа, привод 2 исполнительного органа, датчик 3 момента исполнительного органа, датчик 4 положения исполнительного органа,датчик 5 усилий оператора, блок 6 вычисления зоны нечувствительности, функциональный преобразователь 7, V , VJL, ViL,
rpl, VMHL, VML- выходные сигнзлы датчикз 5 усилий оператора, датчиков 1 положения задающего органа, датчиков 4 положения исполнительного органа, блока 6 вычисления зоны нечувствительности, датчиков 3 момента исполнительного органа, функциональных преобразователей 7 соответственно.
Система работает следующим образом.
Функциональный преобразователь 7 реализует следующую зависимость для каждого i-ro сигнала
VML -- о, если /VMHl/ VorpL K ;;i-yj «V- c rpi;sign(VMHL.)l,
- ; :eC.rR|- Hl/ ur; t
r.ie л ,. ...,-л: которьгй постоянный коэффицм.. euT.:
Итак, функциональный преобразователь представляет собой зону нечувствительности по каналу,момента, причем величина зокы нечувствительности определяется величиной сигнала ., поступающего с блока 6 вычисления зоны нечувствительности.
Блок 6 вычисления зоны нечувствительности определяет величину Vor i. в зависимости от положения задающего и исполнительного органов в пространстве и от величины сигнала V-t с выхода датчика 5 усилия оператора, который может располагаться, например, на рукоятке задающего органа. Величина V-J задается оператором и является модулем силы, которую манипулятору необходимо приложить к объекту. Направление этой силы зависит от направления раосогласован11я конечной точки задающего органа и схвата исполнительного органа манипулятора.
Когда исполнительный орган манипулятора находится в свободной зоне, оператор, увеличив .величину сигнала V.| до максимального значения (велич-ина зоны нечувствительности функционального преобразователя 7 максимальна), практически размыкает моментные связи на приводах 2 исполнительного органа,и манипулятор работает как обычный манипулятор с «жесткой системой управления одностороннего действия. Пусть манипулятор работает с объектом, на который наложень связи. В первый момент оператор отпускает датчик 5 усилия, т.е. сигнал Vt равен нулю. При этом приводы 2 Системы управления манипулятором охвачены глубокими обратными связями по развиваемому моменту, т.е. система управления становится «мягкой. Оператор перемещает задающий орган в сторону предполагаемого движения системы исполнительный органобъект. При этом исполнительный орган не движется, так как у него «мягкая система
управления. После этого оператор увеличивает сигнал Vi, воздействуя на датчик 5 усилия, исполнительный орган при этом развивает усилия, пропорциональные величине усилия оператора. Если при достаточно больщих значениях Vt движения исполнительного органа не происходит, то оператор перемещает задающий орган в другом направлении. При этом блок 6 вычисления зоны нечувствительности перераспределяет величи- ны гр L таким образом, чтобы усилие исполнительного органа было направлено в сторону перемещения конечной точки задающего органа. Далее цикл повторяется, пока операция не будет заверщена.
Применение изобретения позволит опера-
тору дозировать усилия исполнительного органа и работать с объектами, имеющими связи без увеличения габаритов и веса задающего органа. При этом уменьщаются габариты, вес и энергопотребление схем управления приводами по сравнению с системой управления манипулятором двустороннего действия, так как такая система требует меньщего числа активных элементов.
Формула изобретения
Система управления манипулятором, содержащая по каждой управляемой координате последовательно соединенные датчик положения задающего органа и привод исполнительного органа, кинематически связанный через датчик момента исполнительного органа с датчиком положения исполнительного органа, первый выход которого подключен ко второму входу привода, отличающаяся тем, что, с целью расщирения области применения системы, она содержит последовательно соединенные датчик усилий оператора и блок вычисления зоны нечувствительности и по каждой регулируемой координате функциональный преобразователь, первый вход которого подключен к соответствующему выходу блока вычисления зоны нечувствительности, второй входк выходу датчика момента исполнительного органа, а выход - к третье.му входу привода, вторые входы блока вычисления зоны нечувствительности соединены с выходами каждого датчика положения задающего органа, а третьи входы - со вторым выходом каждого датчика положения исполнительного органа.
Источники информации,
принятые во внимание при экспертизе
UM
021)1
(IZL
uzn :
УПН1
np i
Uo2l}n
J/
(Jji
: jn
