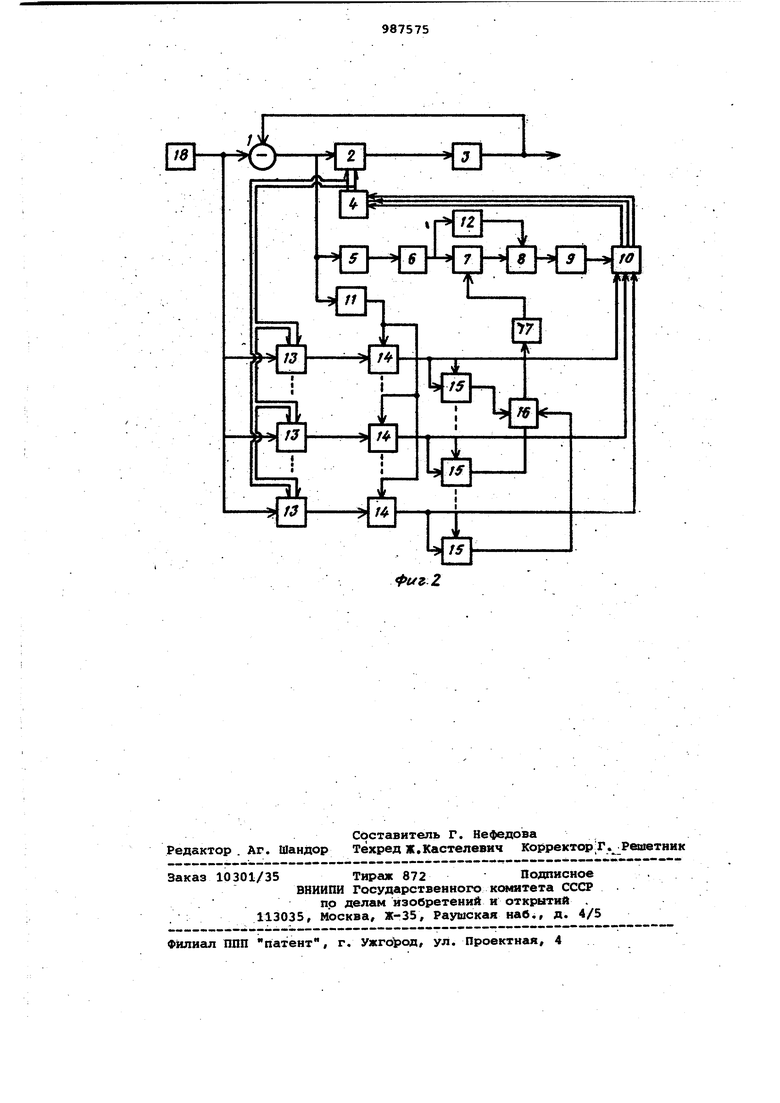
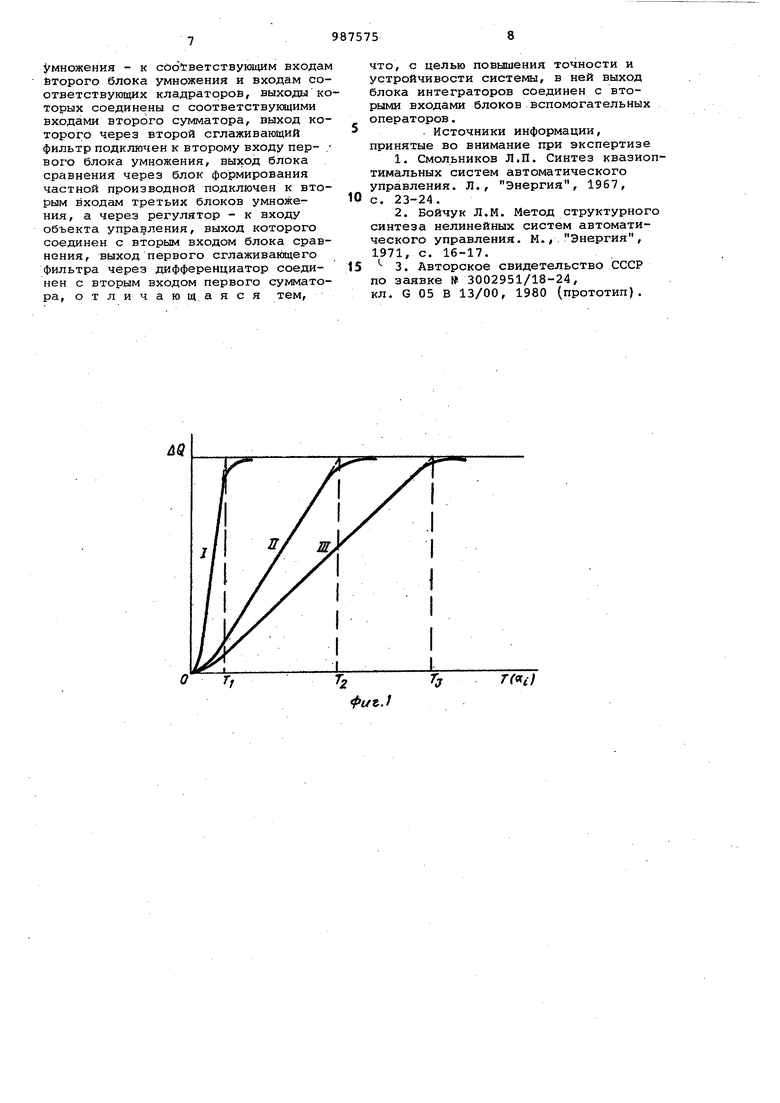
Недостатками данной системы являются малая устойчивость и быстродействие. Наиболее близкой к предлагаемой по техническбй сущности является квазиоптимальная по быстродействию система управления, содержащая посл довательно соединенные задатчик, бл сравнения, формирователь критерия оптимальности, первый сглаживакедий фильтр, первый блок умножения, первый сумматор, усилитель, второй бло ;Умножения и блок интеграторов, выход которого соединен с управляющим вхо дом, регулятора, первые входы блоков вспомогательных операторов подключе ны к выходу задатчика, а выходы через соответствующие третьи блоки умножения - к соответствующим входам второго блока умножения и вхо дам соответствующих квадраторов, вых ды которыхсоединены с соответствующими входами второго с тлматора, выхо которого через второй сглаживающий фильтр подключен к второму входу первого блока умножения, выход блока сравнения через блок формирования ча тной производной подключен к вторым входам третьих блоков умножения, а через регулятор - к входу объекта управления, выход которого соединен с вторым входом блока сравнения, выход первого сглаживающего фильтра чере# дифференциатор соединен с вторым входом первого сумматора з Недостатком известной системы являются низкие устройчивость и быстродействие. Целью изобретения является iioвьшаение быстродействия и устройчивости системы. Поставленная цель достигается тем, что в системе выход блока интеграторов соединен с вторыми входами блоков вспомогательных операторов На фиг. 1 представлен график аремени переходного, процесса; на фиг,, 2 функциональная схема оптимальной по быстродействию системы управления. Система управления содержит блок 1 сравнения, регулятор 2, объект 3 управления, блок 4 интеграторов, формирователь 5 критерия оптимальное ти,первый.сглаживающий фильтр б, пер вый блок 7 умножения, первый сумматор 8, усилитель 9, бторой блок 10 умножения, блок 11 формирования част ной производной,, дифференциатор 12, блоки 13 вспомогательных операторов, третьи блоки 14 умножения, квадраторы 15, второй сумматор 16, второй сглаживающий фильтр 17 и задатчик 18, Рассмотрим работу оптимальной по быстродействию системы управления, Из теории самонастраивакхцихся систем известно, Что полная производная критерия оптимальности Q зависит от скорости изменения подстраиваемых параметров oL-(i 1, 2 , . ., ) и скорости изменения неподстраиваемых параметров|ij(i 1, 2,.., m, а также от характеристик входного сигнала и может быть представлена в виде: аа 3«t, jHL .(, Pj t Из (1) видно, что естественно требование ,а О для обеспечения нормального функционирования контура настройки и устройчивости всей системы с градиен-гипй процедурой поиска) где const О,, а-§, - составляющая, вызванная влиянием входного сигнала и неучитываемых факторов возмущений). Для обеспечения необходимо, чтобы. г j ав fr;3d/ дГ-т Pj так как составлякщие в левой и правой частях имеют разные знаки, Если в иг и (3 ПОЛОЖИТ, J.rO, определяется только входным сигналом х(-Ь), Задача контура настройки в таком случае - компенсация динамической оишбки е. Повышая скорость и величину составляющей в левой, части уравнения (3) можно Обеспечить малую зависимость составлякчцей -4х- в правой части, а значит и зависимость переходного процесса от характеристик входного сигнала xCtJ, Предложенное техническое решение решает задачу обеспечения кваэиоптимального по быстродействию переходного процесса апериодического характера в классе градиентных самонастрацвающихся систем. , Потребуем, чтобы обеспечивалось равенство а -//лй« а, (4) а 0,5е, где е х - у, у выходная величина системы управления. Зададим значение А в уравнении (2) таким, чтЬ«Ы выполнялось условие Л-1«() (5)
Если выражении для Д из (5) подставить в (1), то получим:
, ,1
дО
(fe)
at
l+uJlAQlr 1 К||даГ
где К - коэффициент усиления, выбираемый из условия устойчивости
Из вырё1жения Лб) видно, что в момент резкого изменения входного сигнала, а. значит .и значения критерия Q,. что вызовет значительные величины нормы градиента l/iQ ||2, значение полной производной Q будет вида: .
а при отработке рассогласование ё X - у величина а О, а значит и лв - малая величина, что обеспечат значениеQ -fcj|d. .1%)
Из (7 ) и (8 ) следует, что в . момент возникновения рассогласования алгоритм настройки величины А по закону С 5) обеспечит резкое нарастание интенсивности подстройки коэффициентов а затем по мере отработки ошибки скорость изменения оС; стремится к нулю, реализуя закон процесса нгщстройки близкий кЛ4).
Структурная схема оптимальной по быстродействию системы управления в классе градиентных структур без перерегулирования реализует уравнения С2 ) и (5) (фиг. 2).
Система работает следующим образом. . .
Сигнал поступает с выхода задат;чика 18 на вход блока 1 сравнения, проходит через регулятор 2 и объект 3 управления, с выхода которого выходной сигнал у сравнивается в блоке 1 сравнения с сигналом х, образуя сигнал ошибки системы е X - у. Одновременно сигнал х поступает на входил блоков 13 с передато
ной функцией где Ф(ЦА;,/Ь,-)oo-i
передаточная фуЪкция основного контура управления, состоящего из блоков 1-3.
В блоках 14 умножения сигналы с выходов блоков 13 умножаются на значения §§ , поступающие на вторые входы блоков 14 с выхода блока 11 формирования частной производной. С выходов блоков 14 умножения сигналы поступают на соответствующие вхо д блока 10 умножения, а через, соответствующие квадраторы йа входы сумматора 16, с выхода которого получается результирующий сигнал |(dQII,. который сглаживается в фильтре 17.
Блок 10 умножения в общем случае при настройке п параметров представляет собой п умножителей, в каждом из которых отдельно умножается сигнал с выходов блоков 13 на сигнал с
выхода усилителя 9 с коэффициентом усиления К. Блоки 5, б, ,7, 8 и 12 формируют из сигнала оши,бкй системы е величинуl|ft«t;аи fl+ Q .. Сигнал ошибки, пройдя через формирователь
5 критерия оптимальности а -0,5е, который представляет собой квадратор с коэффициентом усиления равным 0,5, поступает через сглаживакщий фильтр 6 на блок 7 умножения, в котором умножается на величину IfflQI с выхода фильтра 17, а затем на вход сумматора 8. Сигнал с выхода фильтра б поступает на дифференциатор 12, с выхода которого сигнал Q поступает
на вход сумматора 8. Выходной сигнал сумматора 8 поступает на входы п умножителей блока 10 умножения. С каждого умножителя сигнал поступает на входь( соответствуиэщих п интеграторов блока 4 интеграторов/ сигналы с которых лоСПоступают на подстройку параметров otj в регуляторе 2 и блоках 13.
Таким образом осуществляется
настройка параметров ot.; с целью
обеспечения минимума .времени пере- . ходного процесса Т в классе кваэи градиентных структур по апериодическому закону, т.е. формирование переходных процессов типа 1 (фиг. 2-), а
не П и lit. .
Применение изобретения позволяет повысить точность системы управления за счет повышения в шесть раз быстродействия контура настройки, обеспечить апериодический характер подстройки параметров, что бдагоприятно скажется на устрсй чивости контура настройки, а значит и системы управления. Система может быть с
успехом применена в системах управления потоком, где необходимо обес(печение быстрых апериодических ароцедур .настройки.
50
Формула изобретения
Квазиоптима льная по быстродействию система управления, содержаща 5( после довательно соединенные задатчик, блок сравнения, формирователь критерия оптимальности, первый сглаживающий фильтр, первый блок умножения, первый сумматор, усилитель, второй блок
60 умножения и блок интеграторов, выход ко,торого соединен с управляющим входом регулятора,-первые входа блоков вспомогательных операторов подключены к выходу задатчика, а выхо65 Ды через соответствующие третьи блоки
множения - к соответствующим входам Второго блока умножения и входам соответствующих кладраторов, выходы которых соединены с соответствукяцими входами второго сумматора, выход которого через второй сглаживающий фильтр подключен к второму входу пер- . Boio блока умножения, выход блока сравнения через блок фо рмирования частной производной подключен к вторым входам третьих блоков умножения, а через регулятор - к входу объекта управления, выход которого соединен с вторым входом блока сравнения, выход первого сглаживакяцего фильтра через дифференциатор соединен с вторым входом первого сумматора, отличают.аяся тем.
что, с целью повышения точности и устройчивости системы, в ней выход блока интеграторов соединен с вторыми входами блоков вспомогательных операторов.
. Источники информации, принятые во внимание при экспертизе
1.Смольников Л.П. Синтез квазиотимальных систем автоматического управления. Л., Энергия, 1967,
с. 23-24.
2.Бойчук Л.М. Метод структурног синтеза нелинейных систем автоматического управления. М., Энергия, 1971, с. 16-17.
- 3. Авторское свидетельство СССР по заявке 3002951/18-24, кл. G 05 В 13/00, 1980 (прототип).

| название | год | авторы | номер документа |
|---|---|---|---|
| Самонастраивающаяся система управления с эталонной моделью | 1980 |
|
SU1023281A2 |
| АДАПТИВНЫЙ РЕГУЛЯТОР ВОЗБУЖДЕНИЯ СИНХРОННОГО ГЕНЕРАТОРА | 1993 |
|
RU2044401C1 |
| Управляемый фильтр | 1981 |
|
SU970644A1 |
| Самонастраивающаяся система управления с эталонной моделью | 1980 |
|
SU877471A1 |
| Сглаживающий фильтр | 1981 |
|
SU980065A1 |
| Система управления пресс-гранулятором | 1985 |
|
SU1301726A1 |
| Сглаживающий фильтр | 1983 |
|
SU1117583A2 |
| АВТОМАТИЧЕСКИЙ РЕГУЛЯТОР НАПРЯЖЕНИЯ СИНХРОННОГО ГЕНЕРАТОРА | 2011 |
|
RU2465717C1 |
| СИСТЕМА АДАПТИВНОГО УПРАВЛЕНИЯ НЕСТАЦИОНАРНЫМИ НЕЛИНЕЙНЫМИ ОБЪЕКТАМИ | 1990 |
|
RU2031434C1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ | 2013 |
|
RU2541848C1 |