Изобретение относится к электротехнике, а именно к частотно-управляемым электроприводам, построенным на основе асинхронных машин с короткозамкнутым ротором, питаемых от преобразователей частоты, и может быть использовано в системах и механизмах, где требуется достаточно широкий диапазон регулирования скорости вращения при больших нагрузочиых моментах, например в приводе питателя дробилок в горной промышленности.
Цель изобретения - повышение точности управления магнитным потоком асинхронной машины, а также упрощение и повышение надежности устройства.
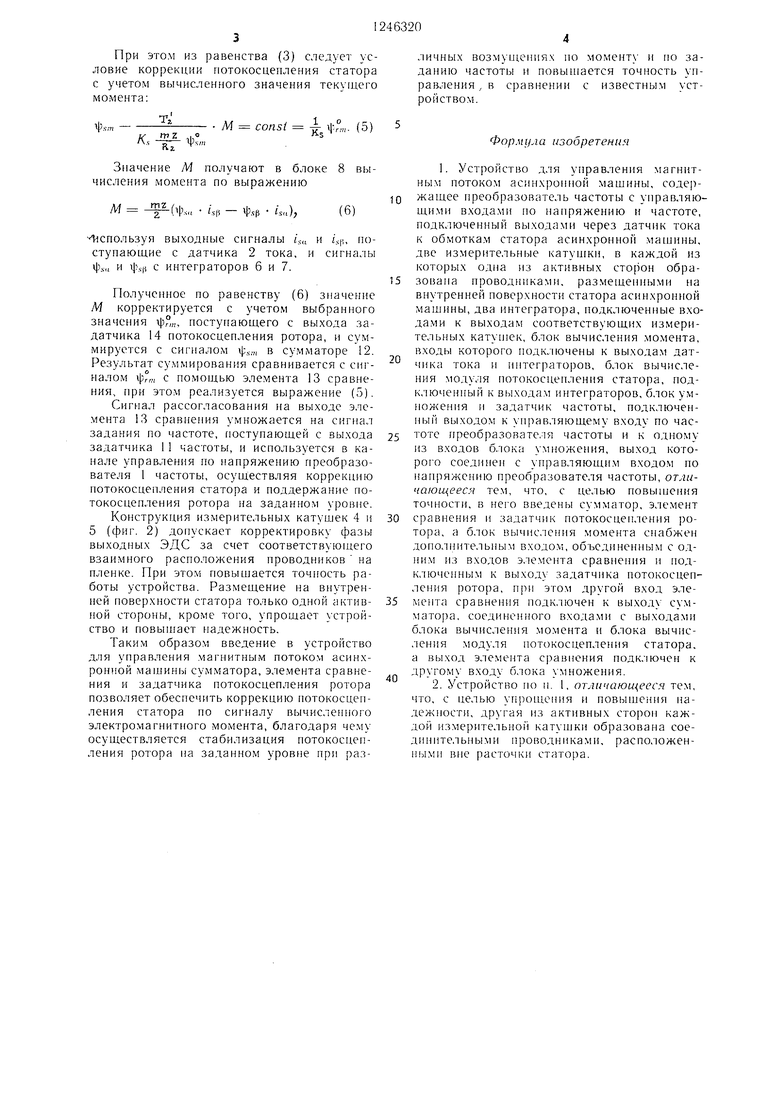
На фиг. 1 представлена функциональная схема устройства для управления магнитным потоком асинхронной мап1ины с короткозамкнутым ротором; на фиг. 2 размещение измерительной катушки на статоре.
Устройство для управления магнитным ю- током асинхронной машины содержит преобразователь 1 частоты (фиг. 1) с управляющими входами по напряжению и частоте, подключенный выходами через датчик 2 тока к обмотка.м статора 3 асинхронной машины, две измерительные катушки 4 и 5, два интегратора 6 и 7, подключенные входами к выходам соответствующих измерительных катушек 4 и 5, блок 8 вычисления момента, входы которого подключены к выходам д атчика 2 тока и интеграторов 6 и 7, блок 9 вычисления модуля потоко- сцепления статора, подключенный к выходам интеграторов б и 7, блок 10 умножения и задатчик 11 частоты, подключенный выходом к управляющему входу по частоте преобразователя 1 частоть( и к одному из входов б. юка 10 умножении, выход которого соединен с управляющим входом по напряжению преобразовате;1я 1 частоты.
В устройство для управления потоком асинхронной машины введены сумматор 12, элемент 13 сравнения и задатчик 14 пото- косцепления ротора.
Блок 8 вычисления момента снабжен дополнительным входом, объединенным с одним из входов элемента 13 сравнения и подключенным к выходу задатчика 14 потоко- сцепления ротора. При этом другой вход элемента 13 сравнения подключен к выходу сумматора 12, соединенного входами с выходами блока 8 вь числения момента и блока 9 вычисления модуля потокосцепления статора, а выход элемента 13 срав 1ения подключен к другому входу блока И) умножения.
В каждой из измерительных катуи ек 4 и 5 одна из активных сторон образована проводником 15 (фиг. 2), размещенным на внутренней поверхности статора 16 (на поверхности пазового клина 17). Дру|-ая из активных сторон каждой измерительной катушки 4 и 5 образована соединительным проводником 18, расположенным вне расточ0
5
0
5
0
0
ки статора 16. Проводники 15 и 18 образуют один виток измерительной катушки. Измерительная катушка может быть выполнена многовитковой. Проводник 15 образуется, например, путем нанесения токопроводя- щего клея на пленку, наклеиваемую на пазовый к. жн 17. Магнитные оси измерительных кату1иек 4 и 5 сдвинуты одна относите; ьно другой на 90 эл. град.
Устройство для управления маг нитным потоком асинхрор1ной работает сле- д у ю щ и м образом.
Магнитный поток асинхронной маитьЧ) наводит в измерительных катуп ках 4 и 5 ЭДС:
.,(11
где 1|;,,„, j-sp - составляющее потокосцеплеиия статора по осям а, (3. На м,ходах И1ггегратороз 6 и 7 (с компенсацией дрейфа нуля) получают напряже- ь ия.. соответствуюп1ие it.,.,, и ijjsp. В блоке 9 вычисления модуля потокосцепления статора реализуется выражение
4,:,,, -у1|;..(2)
где-ф,,;, ---модуль вектора потокосцепле ия
статора.
Для того, чтобы cyniecTBeiiiio повысить перегрузочную способность асинхронной машины, необходимо ввести коррекцию в канал управления потокосцеплением статора так, что при возмущениях момента потоко- сцепление ротора остается без изменения. .Для реи1ения этой задатчи используют сле- дующи.У; соотношением .между потокосцеплением и электромагнитным MOMeiiTo.M, которое является следствием уравнения равновесия ЭДС роторной цепи и уравнения электромагнитного момента:
-М,(3)
1
KS
Д%
тт
Яг
fr
5
0
5
потокосцеп. 1ении стагде i|;s,.,,, 1|-г,„ - моду.ли тора и ротора;
т, Z - число фаз, пар полюсов асинхронной мащины;,
т - li / / i г - , L., - L,- --- ,
/(. . Z-,s I-s
R.
M
h
tm Rr
индуктивность статора; индуктивность ротора; взаи.мная индуктивность статора и ротора;
активное сопротивление ротора;э л е к т р о .м а г н и т и ы и м о .м е н т.
В устройстве решается задача стабилизации потокосцепления ротора при различ- возмуц,1ениях системы, т. е.
|;лш ф°к const,(-1)
где индексом «О обозначено заданное значение потокосцепления.
При этом из равенства (3) следует условие коррекции потокосцепления статора с учетом вычисленного значения текущего момента;
к.
tnZ
RZ
l|3s/n
М const is -
Значение М получают в блоке 8 вычисления момента по вь ражению
М (ip,,,
.so - Флр isa))
(6)
41спользуя выходные сигналы /.,,. и 4f;, поступающие с датчика 2 тока, и сигналы фл. и xj;s|i с интеграторов 6 и 7.
Полученное по равенству (6) значение М корректируется с учетом выбранного значения v|5°,,, поступающего с выхода за- датчика 14 потокосцепления ротора, и суммируется с сигналом ф.,,,, в сумматоре 12. Результат суммирования сравнивается с сигналом ф°,„ с помощью элемента 13 сравнения, при этом реализуется выражение (5).
Сигнал рассогласования на выходе элемента 13 сравнения умножается на сигнал задания но частоте, ностунающей с выхода задатчика 11 частоты, и используется в канале управления ио напряжению преобразователя 1 частоты, осунлествляя коррекцию потокосцепления статора и поддержание потокосцепления ротора на заданном уровне.
Конструкция измерительных катущек 4 и 5 (фиг. 2) допускает корректировку фазы выходных ЭДС за счет соответствующего взаимного расположения проводников на пленке. При этом повышается точность работы устройства. Размещение на внутренней поверхности статора только одной активной стороны, кроме того, упрощает устройство и повышает надежность.
Таким образом введение в устройство для управления магнитным потоком асинхронной мац,1ины сумматора, элемента сравнения и задатчика нотокосцепления ротора позволяет обеспечить коррекцию нотокосцепления статора по сигналу вычисленного электромагнитного момента, благодаря чему осуществляется стабилизация потокосцен- ления ротора на заданном уровне при различных воз.мущегщях по моменту и по заданию частоты и повышается точность управления , в сравнении с известным устройством.
0
5
0
5
0
0
Формула изобретения
1. Устройство для управления магнитным потоком асинхронной мащины, содержащее преобразователь частоты с унравляю- щи.ми входами по напряжению и частоте, подключенный выходами через датчик тока к обмотка.м статора асинхронной машины, две измерительные катушки, в каждой из которых одна из активных сторон образована проводниками, раз.мещенны.ми на внутренней поверхности статора асинхронной , два интегратора, нодключенные входами к выходам соответствующих измерительных катуп1ек, блок вычисления момента, входы которого нодключены к выходам датчика тока и интеграторов, блок вычисления модуля потокосцепления статора, под- к, 1Юченный к выходам интеграторов, блок ум- и задатчик частоты, подключенный выходом к управляющему входу по частоте преобразователя частоты и к одному из входов блока умножения, выход кото- рог о соединен с управляющи.м входом по напряжению преобразователя частоты, отли- чающееся тем, что, с целью повьинения точности, в него введены сумматор, элемент сравнения и задатчик потокосценления ротора, а блок вычис, 1енпя мо.мента снабжен дополнительным входом, объединенш 1м с од- ни.м из входов эле.мента сравнения и подключенным к выходу задатчика потокосцепления ротора, при этом другой вход элемента сравнения подключен к выходу сумматора, соединенного входами с выходами блока вычисления момента и блока вычисления модуля нотокосцепления статора, а выход элемента сравнения подк.чючен к другому входу блока умножения.
2. Устройство по н. 1, отличающееся тем, что, с целью упрощения и повьиненпя надежности, другая из активных сто|юн каждой измерительной катун|ки образована соединительными проводниками, расположенными вне расточки статора.
15
IT
.г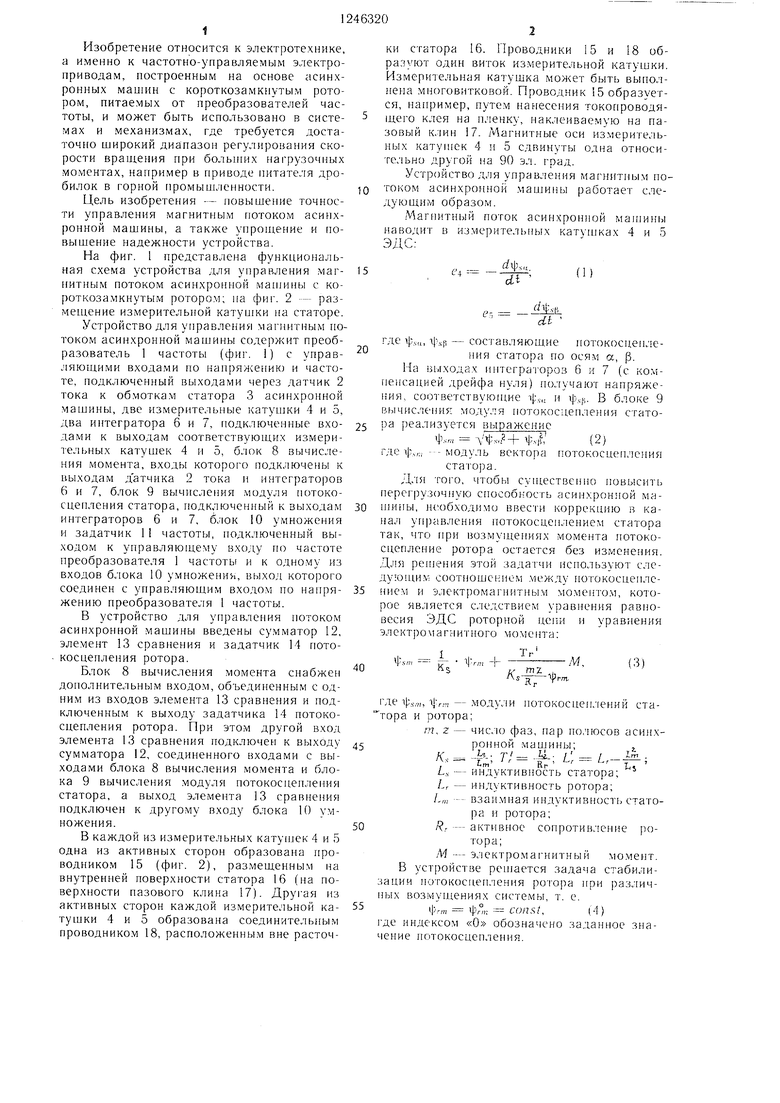
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления асинхронным электродвигателем | 1985 |
|
SU1252903A1 |
| Устройство для управления магнитным потоком асинхронной машины | 1981 |
|
SU987771A1 |
| Частотно-управляемый электропривод | 1988 |
|
SU1527701A1 |
| Частотно-регулируемый электропривод | 1988 |
|
SU1585894A1 |
| Устройство для частотного управления асинхронным двигателем | 1978 |
|
SU744887A1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| Устройство для управления асинхронным частотно-регулируемым электродвигателем | 1983 |
|
SU1128361A1 |
| Электропривод с асинхронной машиной с фазным ротором | 1975 |
|
SU610275A1 |
| СПОСОБ ВЕКТОРНОЙ ОРИЕНТАЦИИ ТОКА ЭЛЕКТРОМЕХАНИЧЕСКОГО ПРЕОБРАЗОВАТЕЛЯ ЭНЕРГИИ И УСТРОЙСТВО ВЕКТОРНОЙ ОРИЕНТАЦИИ ("ВЕКТОРИНГ") ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 1998 |
|
RU2141720C1 |
| Устройство для управления магнитным потоком асинхронной машины | 1980 |
|
SU866683A1 |
Изобретение относится к электротехнике, к управляемым электроприводам. построенным на основе асинхронных манп1н с короткозамкнутым ротором. Цель изобретения - новышение точности управления магнитным потоком асинхронной ман1ины (AM), унроп енне и повышение надежности. Устройство для управления магнитным потоком AM содержит преобразователь 1 частоты, датчик 2 тока, статор 3 АЛ1, две измерительные катушки (ЙК) 4 и 5, два интегратора 6 и 7, блок 8 вычисления момента, блок 9 вычисления модуля потокосцеп- лепия статора, блок 10 умножения и за- датчик I1 частоты. Введение в устройство сумматора 12, элемента 13 сравнения и за- датчика 14 потокос 1епления ротора позволяет обеспечить коррекцию потокосцепления статора по сигналу вычисленного электромагнитного момента. Тем самым осуществляется стабилизация потокосцепления ротора при различных возмущениях и повышается точность управ.ченпя. Конструкция ИК 4 и 5 допускает корректировку фазы выходных ЭДС за счет соответствующего взаимного расположения проводников на пленке. 1 з. п. ф-лы. 2 ил. (Л с: N5 4 О СО Ю Фиг I
| Сандлер А | |||
| С., Сарбатов Р | |||
| С | |||
| Автоматическое частотное управление асинхронными двигателями | |||
| - М.: Энергия, 1974, с | |||
| Экономайзер | 0 |
|
SU94A1 |
| Экснресс-информация | |||
| Сер | |||
| «Автоматизированный электропривод..., 1-976, К° 29, с | |||
| Способ гальванического снятия позолоты с серебряных изделий без заметного изменения их формы | 1923 |
|
SU12A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
