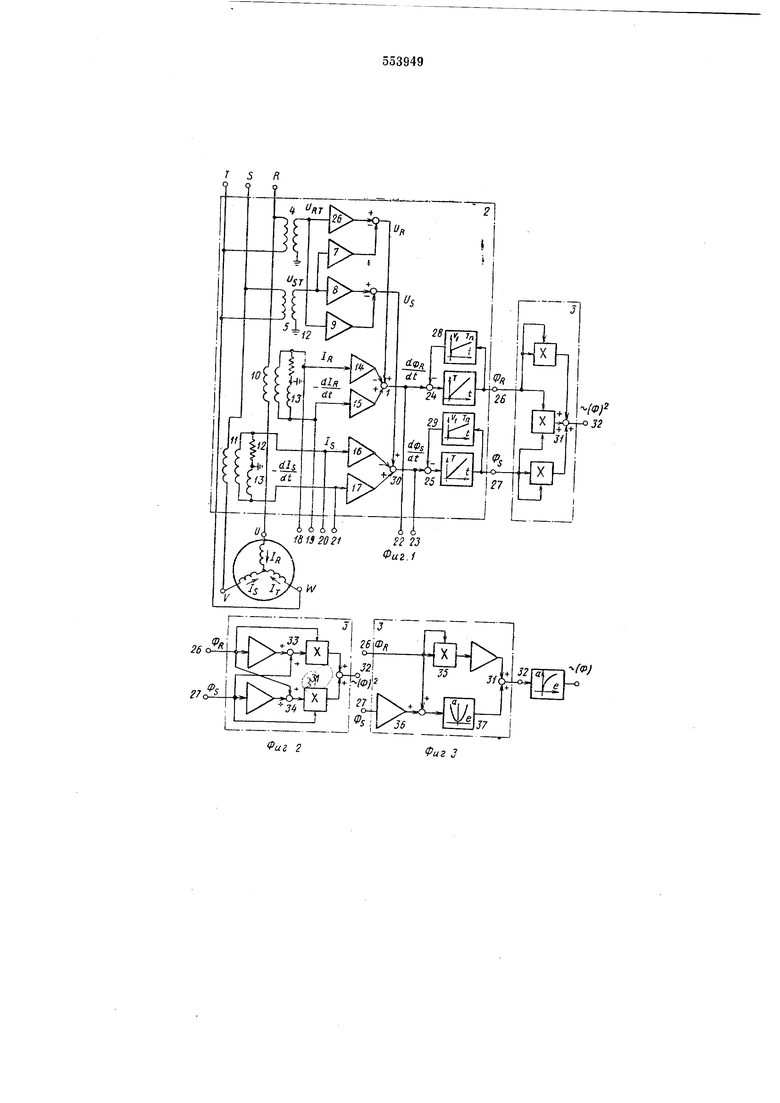
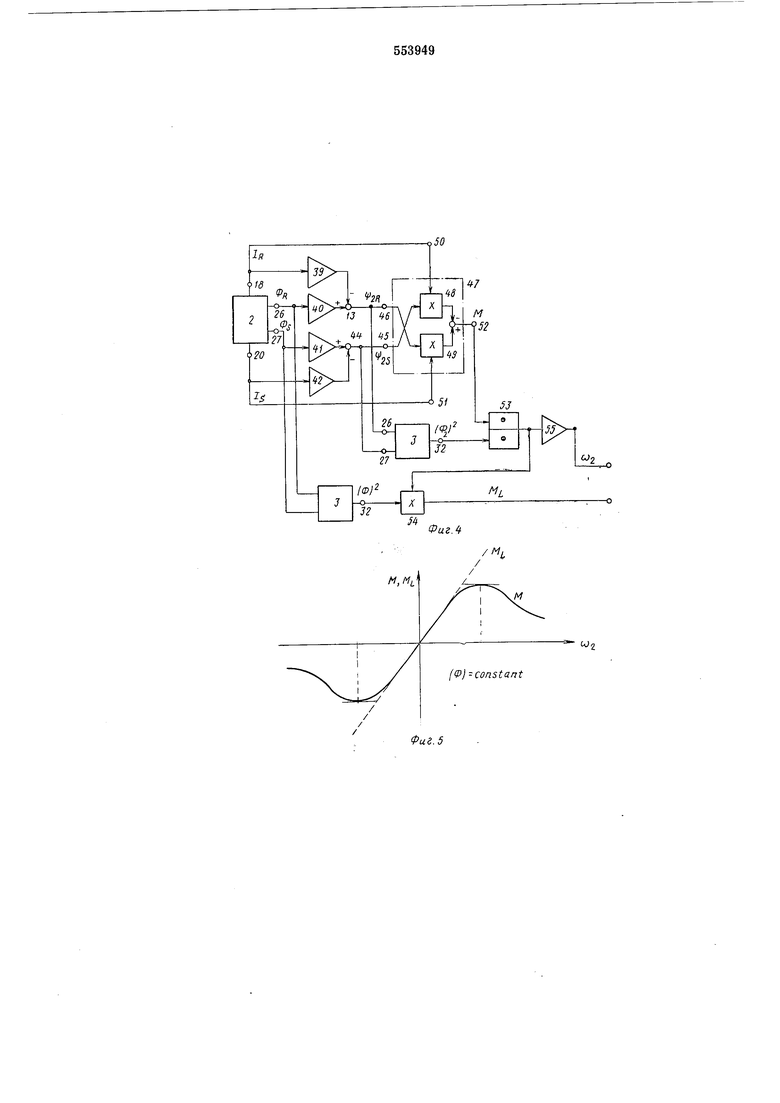
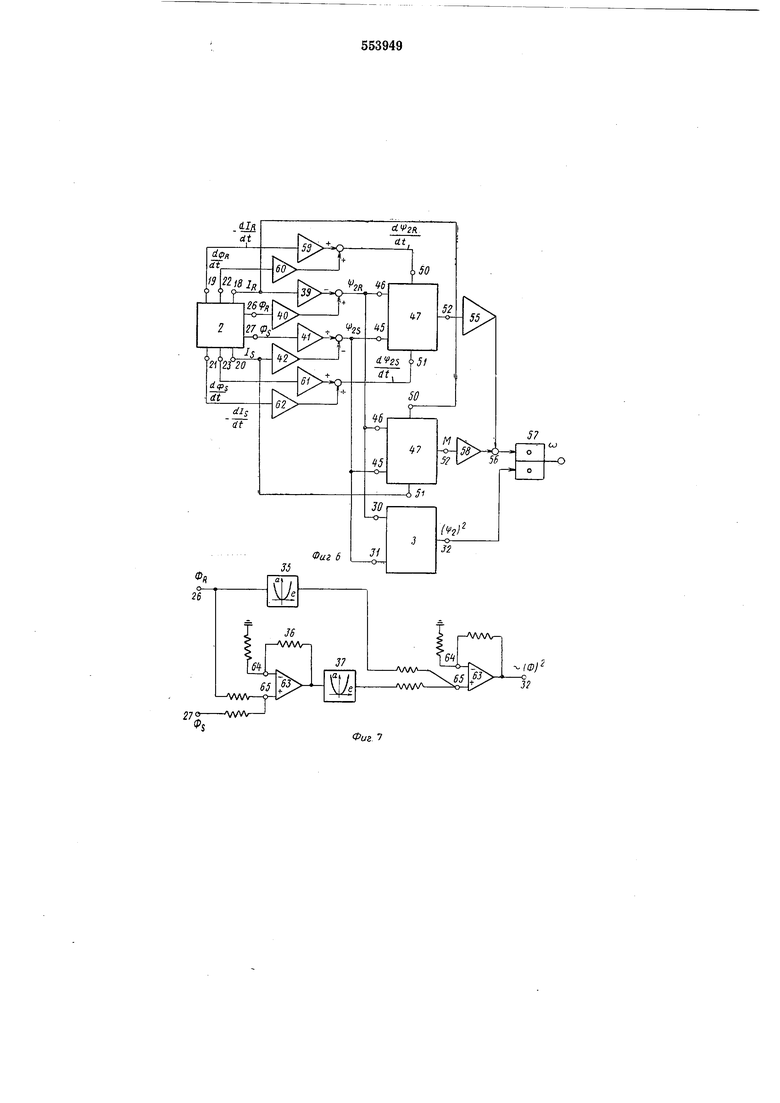
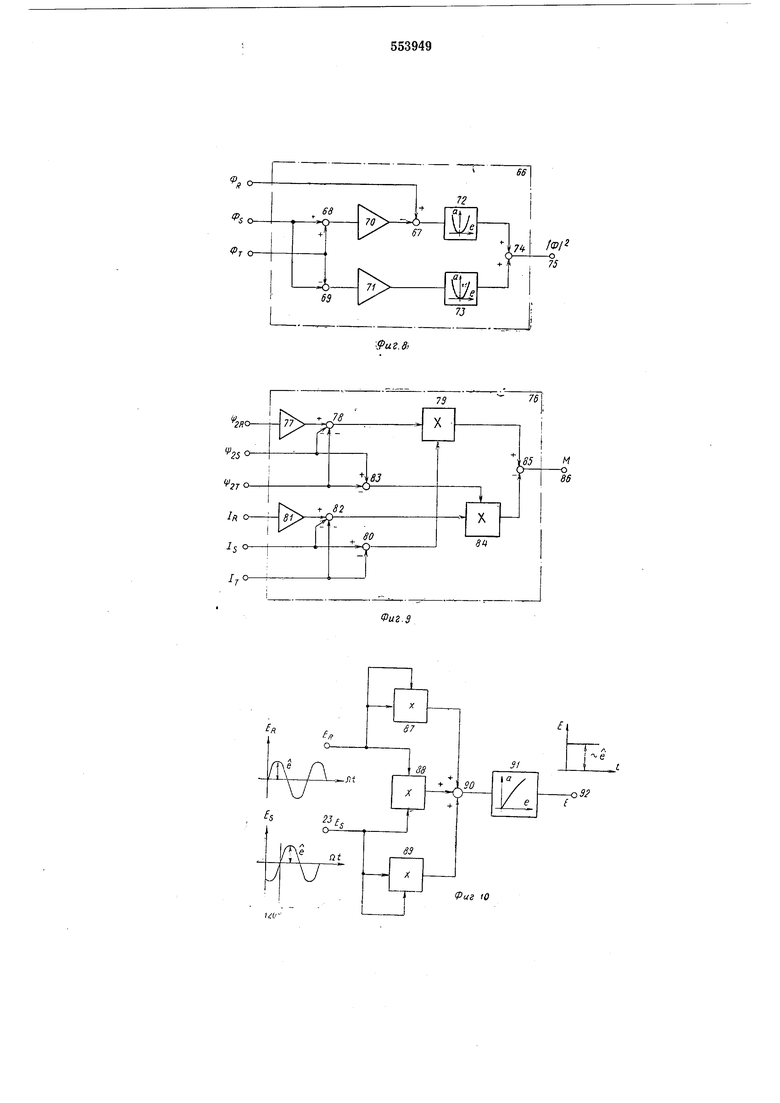
которого подключены к выходам упомянутых формирователей потокосцепления фаз ротора соответственно через второй вычислитель квадрата амплитуды и первый вычислитель векторного произведения, который также как и формирователи потокосцеплений фаз ротора, соединен с формирователями мгновенных значений э. д. с. фаз статора, при этом формирователь потокосцепления фазы ротора содержит два масштабных усилителя и сумматор, а вычислитель векторного произведения содержит два блока умножения и сумматор. Для получения линеаризованного мгновенного значения момента машины в устройство введен блок умножения, входы сомножителей которого подключены к выходу первого вычислителя квадрата амплитуды и к выходу блока деления. Для определения мгновенного значения угловой скорости ротора машины в устройство введены по крайней мере два формирователя мгновенных значений э. д. с. фаз ротора, второй вычислитель векторного произведения с масштабным усилителем, блок деления, сумматор и операционный усилитель, через который первый вычислитель векторного произведения подключен к одному входу упомянутого введенного сумматора, другой вход которого через введенный масштабный усилитель соединен с выходом второго вычислителя векторного произведения, одна пара входов которого подключена к формирователям потокосцеплений фаз ротора, а Другая пара входов подключена через формирователи мгновенных значений э. д. с. фаз ротора к формирователям мгновенных значений э.д.с, фаз статора машины, причем выход введенного сумматора соединен со входом делимого дополнительного блока деления, вход делителя которого подключен к выходу второго вычислителя квадрата амплитуды, при этом каждый формирователь э. д. с. фазы ротора содержит два масштабных усилителя и сумматор. С целью определения мгновенного значения величины э. д. с. фазы статора машины, в него введены третий вычислитель квадрата амплитуды и второй блок извлечения квадратного корня, вход которого соединен через упомянутый третий вычислитель с выходами формирователей э. д. с. фаз статора. На фиг. 1 показана структурная схема устройства для получения следуюших параметров асинхронной машины: фазных токов и их производных, фазных э. д. с., фазны.ч магнитных потоков и квадрата величины вектора потока; на фиг. 2 и фиг. 3 - структурные схемы устройств для формирования величины вектора потока по его фазным составЛЯЮШ.ИМ; на фиг. 4 - структурная схема устройства для формирования тек)щего значения вращающего момента и частоты токов ротора асинхронной машины; на фиг. 5 -графики изменения вращаюшего момента М и линеаризованного ML в зависимости от частоты токов ротора; на фиг. 6 - структурная схема устройства для получения скорости ротора; на фиг. 7 - принципиальная схема устройства для формирования квадрата величины вектора потока; на фиг. 8 - структурная схема устройства для получения квадра та величины вектора потока в случае представления его трехфазной системой, составляющих; на фиг. 9 - структурная схема устройства для формирования величины вращающего момента для случая использования трехфазных составляющих векторов тока статора и потокосценления ротора; на фиг. 10- структурная схема устройства для формирования величины э. д. с. асинхронной машины. Устройство (фиг. I) содержит суммат.ор J, формирователь 2 составляющих потока, вычислитель 3 квадрата амплитуды, измерительные трансформаторы 4, 5 напряжения, масштабные усилители 6-9, измерительные трансформаторы 10, 11 тока, резисторы 12, индуктивности 13, масштабные усилители 14- 17, выходные клеммы 18-23 формирователя 2, интеграторы 24, 25, выходные клеммы 26, 27 формирователя 2 (входные клеммы вычислителя 3 квадрата амплитуды), пропорционально-интегральные усилители 28, 29, сумматоры 30, 31, выходную клемму 32 вычислителя 3. Вычислители (фиг. 2 и 3) содержат сумматоры 33, 34, блок умнол ения 35, масштабный усилитель 36, функциональный генератор 37, блок 38 извлечения квадратного корня. Устройство для формирования значения вращаюшего момента и частоты токов ротоpa (фиг. 4) содержит масштабные усилители 39-42, сумматоры 43, 44, входные клеммы 45, 46 вычислителя 47 векторного произведения, блоки умножения 48, 49, входные клеммы 50, 51 вычислителя 47, выходная клемма 52 вычислителя 47, блок деления 53, блок умножения 54, масштабный усилитель 55. Устройство для получения скорости ротора (фиг. 6) содержит сумматор 56, блок деления 57, масштабный усилитель 58, масштабные усилители 59-62. Устройство для формирования квадрата величины вектора потока (фиг. 7) содержит усилитель 63 постоянного тока со входами 64 и 65. Устройство для получения квадрата величины вектора потока для случая, когда на ходе вычислителя имеется трехфазная ситема сигналов - составляющих вектора (фиг. 8) содернсит вычислитель квадрата мплитуды 66, сумматора 67-69; масштаб ...ы,l ., .jmmciivjpa V/-иу, масшсаиые VCH-fTHTPrTH 7П м 7/- Лгглп о 7У 7О ые усилители 70 и 71; блока 72, 73 возведеия в квадрат или функциональные генераоры, аналогичные генератору 37 (фиг. 3); умматор 74; выходную клемму 75 вычислиеля 6,6. Устройство для формирования величины ращающего момента для случая использоания трехфазных составляющих векторов ока статора и потокосценления ротора фиг. 9) содержит вычислитель 76 векторного роизведения; масштабный усилитель 77; сумматор 75; блок умножения 79; сумматор 80; масштабный усилитель 81; сумматоры 82 и 83; блок умножения 84; сумматор 85; выходную клемму 86 вычислителя 76. Структурная схема вычислителявеличины э. д. с. статора (фиг. 10) содержит вычислитель квадрата амплитуды, аналогичный вычислителю 3 (фиг. 2) и состоящий из блоков умножения 87-89 и сумматора 90, а также блок извлечения квадратного корня 91 с выходной клеммой 92. Рассмотрим, каким образом формируются параметры асинхронной машины, справедливые как для установившихся, так и для переходных режимов работы. С помощью трансформаторов 4 к 5 изменяются линейные напряжения, питающие асинхронную мащину, фазные обмотки которой соединены звездой. С помощью масщтабных усилителей 6-9 по известным формулам преобразования напряжения на выходных обмотках трансформаторов 4 и 5 преобразуются в фазные напряжения f/д и L/S. С помощью измерительных трансформаторов тока 10 и 11, нагруженных на цепи из последовательно включенных резисторов 12 и индуктивностей 13, формируются сигналы, пропорциональные токам фаз мащины и их производным. Эти сигналы поступают на масштабные усилители 14-17 с коэффициентами передачи, пропорциональными величинам активного сопротивления R и индуктивности рассеяния Lie первичной цепи машины. На выходах усилителей 14-17 формируются сигналы, пропорциональные падениям напряжений на указанных фазных сопротивлениях первичной цепи машины. На выходах сумматоров / и 30 формируются сигналы, пропорциональные фазным э. д. с. и вз -- - (клеммы 22 и 23). Эти сигналы интегрируются с помощью интеграторов 24 и 25, на выхо дах 26 и 27 которых формируются фазные составляющие Фд и Фь- вектора потока ма щины. С целью исключения дрейфа интегратора 24 и 25 каждый из них охвачен отрицатель ной обратной связью, в контуре которой ис пользуется пропорционально - интегральный усилитель 28 или 29 соответственно. При этом должно выполняться условие: 2Г; где Т - время интегрирования; Тп - постоянная времени блоков 28 и 29 V - коэффициент пропорционального усиления блоков 28 и 29, которы выбирается возможно малым. С помощью вычислителя 3 квадрата амплиды определяется квадрат величины вектора Блок 3 обесгнитного потока машины чивает определение величины /ФЯ на основе шения уравнения, связывающего квадрат личины вектора с его двумя составляющии в косоугольных координатах: Ф ,2 - ф2 + ф2; 4- . На выходе блока 33 (фиг. 3) имеется ебуемое текущее .значение величины магитного потока (Ф), которое может быть спользовано в качестве сигнала обратной зязи S контуре регулирования потока. На фиг. 4 масщтабные усилители 40, 4} меют коэффициент передачи де LM - индуктивность намагнивания, 2- - индуктивность рассеяния роторной Выходы фазных токов 18 и 20 блока 2 одключены через масщтабные усилители 39 и 42 с коэффициентами передачи к сумматорам 43, 44, к другим входам которых подключены выходы усилителей 40 и 41. На выходах сумматоров 43 и 44 формируются фазные составляющие фзд и ф25 вектора потокосцепления ротора, которые поступают на второй вычислитель квадрата амплитуды и на одну пару входов 45 и 4-6 вычислителя векторного произведения 47. Другая пара входов 50 и 51 этого вычислителя подсоединена к выходам фазных токов 18 и 20 блока 2. Вычислитель 47 определяет векторное произведение двух вектороз, представленных в виде фазных составляющих, и в данном случае вычисляется момент машины по формуле: -Kis - 2siRВ соответствии с этим блок 47 содержит два блока умножения 48, 49 и сумматор с выходом 52 для вращающего момента М: R., 1 -Г (iU,L,. ; R.,f активное сопротивление фазы ротора. Известно соотношение между квадратами величин векторов главного потока Ф и потока сцепления ротора i|;2.i У 1 -г ( ). С учетом этого имеем; М Ail -- М При этом выражение для ML получено исходя из того, что линейная функция М от С02 является касательной к графику момента М (см. фиг. 5), проходящей через начало координат. В соответствии с приведенным выражением для 02 в устройстве на фиг. 4 имеется блок давления 53, формирующий частное « у-р-у-. которое преобразуется с помощью масштабного усилителя 55 с коэффициентом передачи R в текущую частоту 02В соответствии с выражением для линеаризованного момента ML на фиг. 4 имеется блок умножения 54, на выходе которого фор.мируется текущее значение момента ML. Йа фиг. 6, помимо комплекта масщтабных усилителей 39-42, с помощью которого формировались составляющие вектора потокосцепления ротора, введен еще один такой же комплекс масщтабных усилителей для формирования составляющих э.д.с. ротора -JT и - - . При этом введенные усилители подключены к клеммам 19, 21-23 блока 2. Устройство (фиг. 6) построено в соответствии с выражением для величины со: - MR., . Для определения величины в круглых скобках этого выражения введен второй вычислитель векторного произведения 47 векторов потокосцепления и э. д. с. ротора, выход которого подключен к сумматору 56 через масщтабный усилитель 55 с коэффициентом 3 1/3 передачи . Произведение М R получается на выходе масштабного усилителя 58 с коэффициентом передачи Rz, вход которого подключен к выходу первого вычислителя векторного произведения 47, служащего для формирования величины М. На выходе сумматора 56 формируется величина в соответствии с выражеиием в квадратных скобках формулы для а и используется в качестве делимого в блоке 57. В качестве делителя этого блока используется выходной сигнал с блока .3 (второй вычислиdi 2Rтель квадрата амплитуды), о котором уже говорилось при рассмотрении фиг. 4. На выходе блока деления 57 формируется текущее значение скорости ротора со. В основу схемы фиг. 7 положен усилитель постоянного тока 63 с дифференциальными входами, на базе которого осуществляются операции масштабирования и суммирования сигналов в соответствии с величинами резисторов в его входных цепях. Вычислитель (фиг. 8) определяет квадрат амплитуды вектора в соответствии с формулой:|ф2| фз 4--Ф5+ф27 -Ф/гФ5- .УФГ. Л асщтабные усилители 77 и 81 имеют коэффициенты передачи, равные двум, а коэффициенты передачи всех сумматоров блока 76 по любому из входов одинаковы. На вход вычислителя (фиг. 10) поступают фазные составляющие fn и ES вектора э.д.с., получаемые с клемм 22 и 23 блока 2 (фиг. 1). Сигнал, пропорциональный э. д. с. мащины, выделяют для того, чтобы формировать сигнал -, оропорциональныи величине потока Ф, и использовать этот сигнал в контуре регулирования потока. Устройство согласно изобретению целесообразно применять в случаях, когда требуются текущие параметры асинхронной мащины, необходимые для высокодинамичных систем регулирования, и когда размещение измерительных датчиков внутри и на валу асинхронной мащины невозможно. Формула изобретения I. Устройство для определения параметров трехфазной асинхронной машины, содержащее формирователь мгновенного значения э. д. с. фазы статора машины с трансформаторным датчиком тока фазы, подключенным через L-делитель и масштабные усилители к сумматору, к которому через другие масщтабные усилители подключен трансформаторный датчик напряжения фазы, интегратор и формирователь величины потока, вход которого через интегратор подключен к выходу упомянутого сумматора, отличающееся тем, что, с целью определения мгновенного значения величины потока мащины, введен по крайней мере еще один формирователь мгновенного значения э. д. с. фазы статора с интегратором, выход которого подключен к формирователю величины потока, содержащему первый вычислитель квадрата адшлитуды и подключенный к нему блок извлечения квадратного корня. 2. Устройство по п. 1, отличающееся тем, что, с целью повыщения точности определения потока, в нем каждый интегратор содержит интегрирующий решающий усилИ тель, в котором применен контур отрицательной обратной связи с пропорционально-интегральным усилителем.
3.Устройство по пп. 1, 2, отличающееся тем, что, с целью определения мгновенного значения электромагнитного момепта машины и частоты токов ротора, в него введены по крайней мере два формирователи мгновенных значений потокосцепления фаз ротора, первый вычислитель векторного произведения, второй вычислитель квадрата амплитуды и блок деления, входы делителя и делимого которого подключены к выходам упомянутых формирователей потокосцепления фаз ротора соответственно через второй вЫ числитель квадрата амплитуды и первый вычислитель векторного произведения, который также, как и формирователи потокосцеплений фаз мотора, соединен с формирователями мгновенных значений э. д. с. фаз статора, при этом формирователь потокосцепления фазы ротора содержит два масштабных усилителя и сумматор, а вычислитель векторного произведения содержит два блока умножения и сумматор.
4.Устройство по пп. 1-3, отличающееся тем, что, с целью получения линеаризованного мгновенного значения момента машины, в него введен блок умножения, входы сомножителей которого подключены к выходу первого вычислителя квадрата амплитуды и к выходу блока деления.
5.Устройство по пп. 1-4, отличающееся тем, что, с целью определения мгновенного значения угловой скорости ротора машины, в него введены по крайней мере два формирователя мгновенных значений э. д. с. фаз ротора, второй вычислитель векторного произведения с масштабным усилителем, блок
деления, сумматор и операционный усилитель, через который первый вычислитель векторного произведения подключен к одному входу упомянутого введенного сумматора, другой
вход которого через введенный масштабный усилитель соединен с выходом второго вычислителя векторного произведения, одна пара входов которого подключена к формирователям потокосцеплений фаз ротора, а другая
пара входов подключена через формирователи мгновенных значений э. д. с. фаз ipOTOpa к формирователям мгновенных значений э. д. с. фаз статора машины, причем выход введенного сумматора соединен со входом делимого
дополнительного блока деления, вход делителя которого подключен к выходу второю вычислителя квадрата амплитуды, при этом каждый формирователь э. д. с. фазы ротора содержит два масштабных усилителя и сумматор.
6. Устройство по пп. 1-5, о т л и ч а ющ е е с я тем, что, с целью определения мгновенного значения величины э. д. с. фазы статора машины, в него введены третий вычислитель квадрата амплитуды и второй блок извлечения квадратного корня, вход которого соединен через упомянутый третий вычислитель с выходами формирователей э. д. с. фаз статора.
Источники информации, принятые во внимание при экспертизе:
1.Сандлер А. С., Сарбатов Р. С. «Частотное управление асинхронными двигателями.
изд-во «Энергия, 1966 г.
2.Looke G., Probleme der Spannnngsanpassung beim Betrieb von Asynchronmotoren mit variabler Frequenz. AEG Mitt., 1964 г., 54, № 1.
Г S R
иг 2
Г
28
ЧФ)
032
/
хМ
27
О
L1J
(ф)
Фиг 3
47
53
f4
Фиг.4
Фиг. 5
Фиг 7
R О
Ф,
s О
ф
г о
| название | год | авторы | номер документа |
|---|---|---|---|
| ВЫСОКОДИНАМИЧНЫЙ БЕЗДАТЧИКОВЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД С НЕПОСРЕДСТВЕННЫМ УПРАВЛЕНИЕМ МОМЕНТОМ | 2012 |
|
RU2498497C1 |
| Электропривод с асинхронной машиной | 1971 |
|
SU548220A3 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2006 |
|
RU2313894C1 |
| Электропривод с векторным управлением | 1987 |
|
SU1443112A1 |
| СПОСОБ ВЕКТОРНОЙ ОРИЕНТАЦИИ ТОКА ЭЛЕКТРОМЕХАНИЧЕСКОГО ПРЕОБРАЗОВАТЕЛЯ ЭНЕРГИИ И УСТРОЙСТВО ВЕКТОРНОЙ ОРИЕНТАЦИИ ("ВЕКТОРИНГ") ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 1998 |
|
RU2141720C1 |
| Электропривод переменного тока | 1984 |
|
SU1464276A1 |
| Устройство для частного управленияэлЕКТРОпРиВОдОМ пЕРЕМЕННОгО TOKA | 1978 |
|
SU794701A1 |
| Способ управления асинхронным электродвигателем и устройство для его осуществления | 1981 |
|
SU1443110A1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2020724C1 |
76
73
