(54) УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ МАГНИТНЫМ ПОТОКОМ АСИНХРОННОЙ МАШИНЫ
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления магнитным потоком асинхронной машины | 1981 |
|
SU987771A1 |
| Устройство для измерения частоты вращения вектора магнитного потока машины переменного тока | 1980 |
|
SU892373A1 |
| Устройство для управления асинхронным электродвигателем | 1985 |
|
SU1252903A1 |
| Устройство для определения параметров трехфазной асинхронной машины | 1969 |
|
SU553949A3 |
| Устройство для управления магнитным потоком асинхронной машины | 1984 |
|
SU1246320A1 |
| ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА | 1995 |
|
RU2101846C1 |
| Электропривод с асинхронной машиной | 1971 |
|
SU548220A3 |
| Устройство для измерения модуля и направляющих косинусов вектора главного потокосцепления в машинах переменного тока | 1987 |
|
SU1594464A1 |
| Устройство для измерения модуля и направляющих косинусов вектора главного потокосцепления в машинах переменного тока | 1981 |
|
SU974310A1 |
| Частотно-регулируемый электропривод | 1984 |
|
SU1166257A1 |
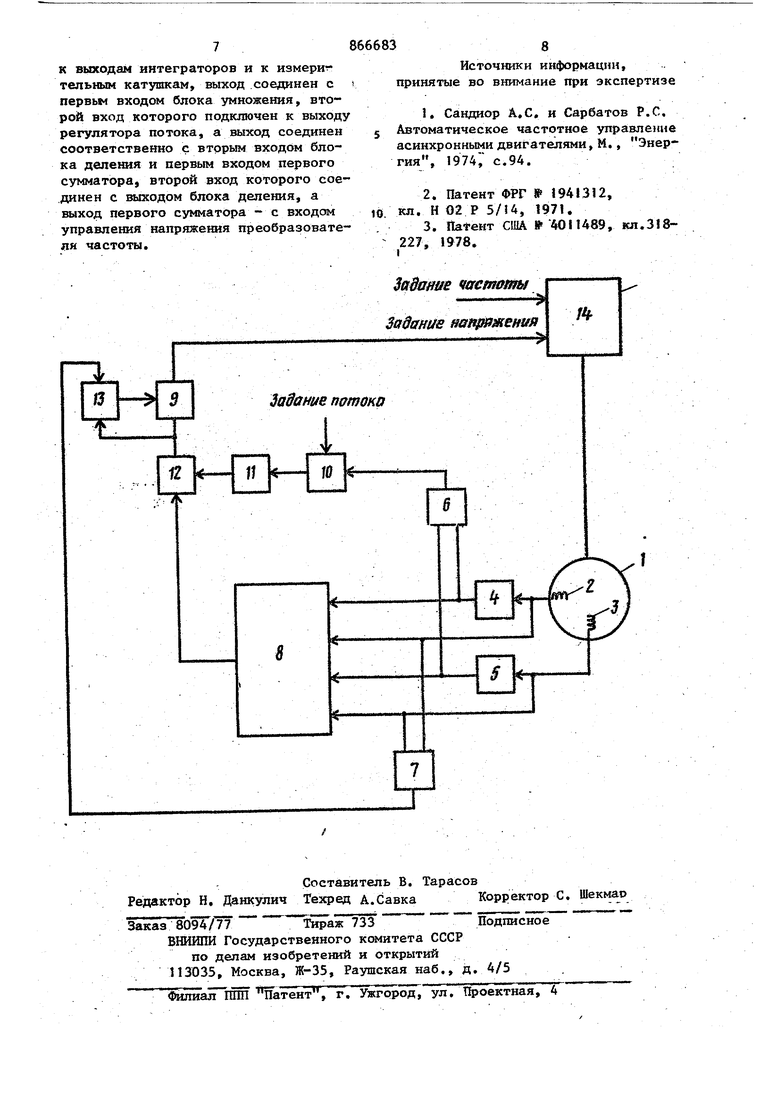
Изобретение относится к электротехнике, в частности к частотно-управляемому электроприводу и может быть использовано для регулирования магнитного потока в асинхронных машинах. Известно устройство для стабилизации магнитного потока асинхронной машины по ЭДС измерительной сатушки охватывающей полюсное деление стато ра Jl. Однако известное устройство имее малую точность в статических режима имеет очень большую погрешность в переходных режимах и в силу этого совершенно неприемлемо в устройствах, где необходимо управлять переходными режимами. Известно также устройство для управления магнитным потоком, в котором исходная информация о потоке формируется с помощью датчиков Холла, размещенных в воздушном зазоре машины, Й1Я управления магнитным по током машины все измеренные переменные пересчитываются в систему координат, связаннее с вектором потока, а затем осуществляется управление потоком. Jlffin пересчета используется устройство для непрерьгоного измерения направления вектора потока - тригонометрический анализатор, который представляет собой двухфазный генератор, следующий за двухфазной системой, образованнс вектором потока и специальшоми пересчетньми блоками С23. Недостатком :устоойства является его сложность,так как помимо устройств для непосредственного измерения и управления потоком требуются еще дг вольно сложные устройства для двухкратного преобразования коо динат. Кроме TOio, управление магнитным потоком в описываемом устройстве ведется по первой гармонике магнитного лоля, а при питании от преобразо чтелей частоть высшие гармонические составляют до 40-50% от общего потока; Все это снижает точность ра боты устройства. Наибстее близким к изобрететда по технической сущности является устройство для управления магнитным потоком в асинхронном двигателе с тремя измерительными катушками, расположеншлии в пазах статора, выходы которых подсоединены к входам трех интеграторов, выходы которь х подсоедйнены к выпрямителям, а,гходы выпрямителей подсоединены к входу сумматора, выход которого подключен на другой С5гмматор, с которым связан блок задания потока, а выход этого сумматора подключен к входу регулятора, выход которого подключен на первый вход блока умножения. Второй вход блока умножения подключен к задатчику частоты. Выход блока умножения соединен с первым входом блока деле-ния, второй вход которого подклю чен к выходу источника постоянного тока, питающего преобразователь частоты, а выход блока деления подключен к первому входу преобразователя частоты. Инсеграторы вырабатывают сигналы, пропорциональные магнитному потоку. Эти сигналы выпрямляются, суммируются, сравниваются с заданием и ошибка подается на регулятор. Сигнал, получаемый с регулятора, змно- жаётся, с помощью блока умножения на задаваемую частоту напряжения ста тора и передается на устройство управления тирйсторным преобразователем з, В известном устройстве задание на ряжения на статоре двигателя достаточно точно обеспечивает управление магнитным потоком в установившемся режиме. Однако, в переходных режимах такое устройство не обеспечивает точного зправления, т.е. напряжение определяется не по значению частоты вращения вектора потока машины, а по частоте, которая задается и которая в переходных режимах может значитель но отличаться от действительной частоты вращения вектора потока асинхро ной машины. Кроме того, определение результирующего потока производятся выпрямлением сигналов, т.е. без учета фазовых соотношений между вектора ми и может значительно отличаться ot модуля, т.е. величины вектора потока. Цель изобретения - повышение точности работы. Поставленная цель достигается тем, что в устройство, содержащее интеграторы, соед 1ненные с измерительными катушками, блоки деления и умножения, первый и второй сумматоры, регулятор потока, соединенный с выходом второго сзмматора, вход которого соединен с выходом вычислителя модуля вектора потока, входы которого соединены с выходами интегратора, преобразователь частоты, выход которого подключен к асинхронной матине, введены вычислитель квадрата модуля производной потока, определитель частоты вращения вектора потока, причем входы вьучислителя квадрата модуля производной потока соединены cooiветственно с измерительными катушками, а выход с первым входом блока деления, входы определения частоты вращения вектора потока соединены с выходами интеграторов потока и измерительными катушками, а его выход соединен с первым входом блока умножения, второй вход которого подключен к выходу регулятора потока, а тлход связан соответственно с вторым входом блока деления и первым входом первого сумматора, второй вход которого соединен с выходом блока Деления, а выход сумматора подключен к входу управления напряжения преобразователя частоты. На чертеже приведена структурная схема устройства для управления магнитным потоком асинхронной машины. Устройство для управления магнитным потоком асинхронной машины 1, снабженной измерительными катушками 2 и 3, содержит интеграторы 4 и 5 потока, вычислитель 6 модуля вектора потока, вычислитель 7 квадрата модуля производной потока, определителя 8 частоты вращения вектора потока, первого и второго cy aтopoв 9 и 10, регулятора П потока, блока 12 умиожения, блока 13 деления и преобразователя 14 частоты. Измерительные катушки 2 и 3 соединены с входами интеграторов 4 и 5 потока и определителя 8 частоты вращения вектора потока, на входы которого так же подсоединешл выходы интеграторов 4 и 5 потока. Шходы интеграторов 4 и 5 потока подключены на вход вычислителя 6 модуля вектора потока, выход которого подключен к входу второго сумматора 10, на другой вход
.которого подается яадание потока. Выход второго сумматора 10 подается на вход регулятора 1 потока, вы, ход которого подается на первый вход блока 12 умножения, другой вход которого подключен к выходу определителя 8 частоты вращения вектора потока. Измерительные катушки 2 и 3 подсоединены к входам вычислителя 7 квадрата модуля производной потока, выход которого подключен к первому входу блока 13 деление. Второй вход блока 13 деления подключен к выходу блока 12 умножения. Выход блока 12 умножения подключен к входу сумматора 9, с другими входами которого соединен выход блока {3 деления, а выход сумматора 9 подключен к первом входу преобразователя 14 частоты, на второй вход которого подается сигнал задания частоты.
Устройство работает следую1а;им образом.
Магнитный поток асинхронной машины 1 индуктирует ЭДС в измерительных катушках 2 и 3, которые установлен. на статоре машины. Интегрируя ЭДС в этих катушках интеграторами 4 и 5 потока определяются мгновенные зна- чеьшя потоков по осям. Вычислитель 6 модуля вектора потока по сигналам, снимаемым с интеграторов 4 и 5 потока находит величину модуля потока и передает ее в сумматор 10, в котором этот сигнал сравнивается с заданием по модулю потока. Ошибка передается на регулятор 11, Сигнал, снимаемый с регулятора 11, умножаетс блоком 12 умножения на сигнал, npdпордиональный мгновенному значению частоты вращения вектора потока который вырабатывается определителем В частоты вращения вектора потока. На вход определителя В частоты вращения вектора потока подаются сигналы .от, измерител ных катушек 2 и 3 и от интеграторов 4 и 5 потока, которые позволяют определить частоту вращения вектора потока. В результате на выходе блока 12 умножения формируется сигнал, пропорциональныйзадаваемому напряжению, который передается на сумматор 9. На другой вход сумматора 9 подается сигнал от блока 13 деления. На вход блока 13 деления подан сигнал от вычислителя 7 квадрата модуля производной от магнитно. го потока, на вход которого подаются сигналы от измерительных катушек
2 и 3. На вход блока 13 деления подается сигнал, вырабатьшаемый блоком 12 умножения. В сумматоре 9 добавляется сигнал, который обеспечивает поддержание заданного потока в переходных режимах. Сигнал, формируемый .сумматором 9, передается в канал системы управления преобразова-теля 14 частоты, который управляет
величиной выходного напряжения преобразователя..
Таким образом, заданное напряжение «Ьормируется с учетом мгновенного значения частоты вращения векS тора потока, и кроме того, сигнал формируемый блоком , создает дополнительную составляющую напряжения, которая поддерживает поток неизменным в переходных режимах, вызQ ванных возмущениями при изменении момента сопротивления или изменением задания. Благодаря введению сигнала, пропорционального мгновенному значению частоты вращения вектора
5 потока, а также введению в задание напряжения составляющей, которая компенсирует переходную составляющую, предлагаемое устройство позволяет повысить точность работы как в установившемся режиме, так и в переходных режимах работы асинхронной машины.
Формула изобретения
5 Устройство для управления маптит- гглм потоком асинхронной машины с измерительными катушками, содержащее интеграторы, соединенные с измерительными катушками, блок деления
0 и умножения, первьй и второй сумматоры, регулятор потока, соединенный с выходом второго сумматора, вход которого соединен с выходом вычислителя МОДУЛЯ вектора потока, входа
которого соединены с выходами интеграторов потока, преобразователь частоты, выход которого подключен к асинхронной машине, отличаюш е е с я тем, что, с целью повышения точности, в него введены выO
числитель квадрата модуля производной потока, определитель частоты .вращения вектора потока, причем sx.o}j вычислителя квадрата модуля производной потока соединены соот5ветственнЬ с измерительными 1сатущкамй, а выход с первым входом блока делеш:я, входы определителя частоты вращения вектора потока подключены
