Изобретение относится к радиоэлектронике, промышленности средств связи, радиопромышленности и может быть использовано при изготовлении подложек микросхем на кристаллах, в том числе из пьезокварца.
По основному авт.св. № 768616 известно устройство для исправления угла среза кристаллографически ориентированных подложек, выполненное в виде корпуса и рабочих секций, каждая из которых состоит из одной неподвижной и одной подвижной втулок, установленных на общем валу, имеющих по одному перпендикулярному, к оси и одному скошенному под равными углами торцу и контактирующих друг сДРУГОМ по перпендикулярным торцам, причем на скошенном торце подвижной втулки, снабженной фиксатором, укреплена поворотная кассета, имеющая сквозное отверстие, соответствующее контурной форме исправляемой подложки l.
Недостатком известного устройства является невозможность исправления углов среза подложек различной толщины; Известное устройство применимо только для подложек одной какойлибо конкретной толщины, при которой
центр подложки лежит на оси вращения (оси подвижной втулки), вокруг которой осуществляется разворот подложки (здесь и в дальнейшем под центром подложки подразумевается центральная точка на поверхности подложки после снятия припуска На обработку). при изменении толщины подложки центр ее будет смещен отно10сительно оси вращения, и при обработке будет наблюдаться разворот подложки вокруг дополнительной неконтролируемой оси.
Целью изобретения является рас15 ширение технологических возможностей
устройства за счет обработки подло. жек различной толщины.
Цель достигается тем, что в устройство для исправления угла среза
20 кристаллографически ориентированных пластин дополнительно введен стол, установленный с возможностью перемещения в направляющей, выполненной на скошенном торце подвижной втулки,
25 снабженной тарировочной шкалой, а поворотная кассета установлена на столе.
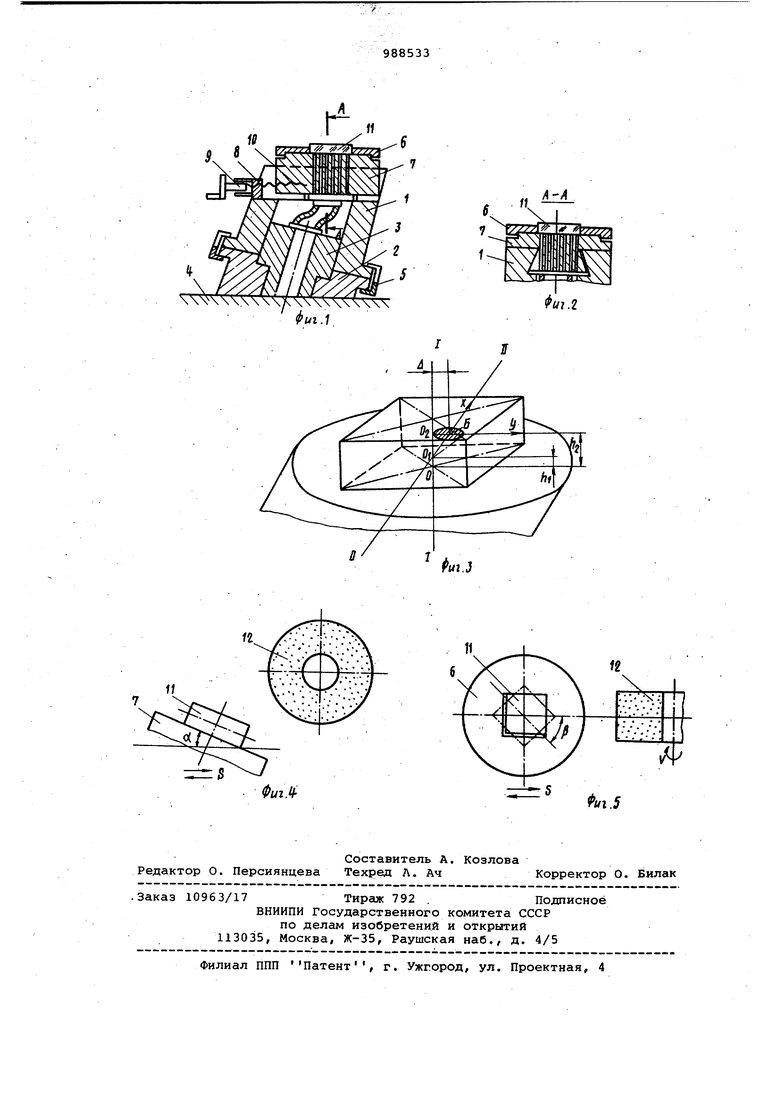
На фиг.1 изображено предлагаемое устройство, разрез на фиг,2 - се30чение А-А на фиг.1; на фиг.З - схема, поясняющая совмещение центра подложки с осью вращения подвижной втулки; на фиг.4 - положение подлож ки после настройки на определенный угол среза; на фиг.5 - предлагаемое устройство, вид сверху. Устройство состоит из двух втулок , подвижной 1 и неподвижной 2, общего пустотелого вала 3, с помощь которого втулки крепятся к корпусу 4 и в полости которого создается ва куум, фиксирующей гайки 5, кассеты 6,стола 7, стойки 8, тарированной головки 9 и микровинта 10. Каждая из втулок имеет соответственно перпендикулярные и скошенные под одина ковыми углами торца. Постоянный кон такт втулок при взаимном вращении осуществляется по перпендикулярным торцам, при этом один из скошенных торцов постоянно служит основанием, а на торце второго по направляющим базируется стол 7. Гайка 5 служит для фиксирования относительного углового положения втулок 1 и 2. В сквозное отверстие кассеты б устанавливается обрабатываемая подложка 11. К подвижной втулке 1 крепитс стойка 8. Работа и настройка устройства происходит следующим образом. На базовую плоскость стола 7 уст навливается обрабатываемая подложка 11. После этого создается разрежение в полости устройства и подлож ка фиксируется на поверхности стола 7.Затем при заданной теоретической толщине h (получаемой после снятия припуска)при помощи микровинта 10 и головки 9, оттарированной в зависимости от теоретической толщины подложки, перемещают в горизонтальн плоскости.стол вместе с подложкой так, чтобы ось подложки 1-1 и ось подвижной втулки 11-11 пересекались в точке О, , определяющей заданную .толщину подложки h (фиг.З). При изменении толщины подложки на Ь-з. происходит рассогласование центра пересечения осей на расстояние , равное Д , в связи с чем при повороте подвижной втулки 1 подложка поворачивается как по оси X (на заданный угол), так и по оси У (на побочный угол, вносящий погрешность Для исключения этого необходимо с помощью микровинта 10 и головки 9 стол с подложкой сместить на величину Д и совместить точку Б, расположенную на оси 11-11, т.е. оси X, с вертикальной осью подложки 1-1, Затем базовая плоскость стола, ориен-. тируется на требуемый угол оС , равный поправке угла плоскости среза подложки, путем вращения втулки 1 относительно неподвижной втулки по лимбу (фиг.4) . Требуемый угол of, фиксируется гайкой 5. Далее должно быть откорректировано направление наклона плоскости среза относительно шлифовального круга 12. Кор|)ектировка производится за счет поворота кассеты 6 по лимбу на требуемый угол /% (фиг.З). Конструкция предлагаемого устройства Имеет широкие технологические возможности - позволяет устранить такое отрицательное явление, как одновременный разворот подложки по двум осям, возникающий при несовмещении центра подложки с осью вращения подвижной втулки, что имеет место в известном устройстве при пе,: реходе на обработку подложек другой толщины. По сравнению с известным предлагаемое устройство дает BO3MokHOCTb снизить трудоёмкость на 20-40% и повысить производительность за счет возможности обработки подложек различной толщины. Формула изобретения Устройство для исправления угла среза кристаллографически ориентированных пластин по авт.св.№ 768616, отличающеес я тем, что, с целью расширения технологических возможностей устройства, оно снабжено столом, установленнЕли с возможностью перемещения в выполненной на . скошенном торце подвижной втулки направляющей и несущим поворотную кассету. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 768616, кл. В 24 В 41/00, 1978.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для исправления угла среза кристаллографически ориентированных пластин | 1978 |
|
SU768616A1 |
| СПОСОБ ДОВОДКИ ОРИЕНТАЦИИ ПОДЛОЖЕК ДЛЯ ЭПИТАКСИИ АЛМАЗА | 2012 |
|
RU2539903C2 |
| Устройство для исправления углаСРЕзА КРиСТАллОгРАфичЕСКи ОРиЕНТи-РОВАННыХ плАСТиН | 1979 |
|
SU812539A1 |
| Станок для правки пластин | 1989 |
|
SU1706761A1 |
| Способ установки детали и устройство для его осуществления | 1989 |
|
SU1731578A1 |
| СПОСОБ БЕСПУСТОТНОГО СРАЩИВАНИЯ ПОДЛОЖЕК | 2002 |
|
RU2244362C2 |
| Устройство для ионно-плазменной обработки подложек в вакууме | 1985 |
|
SU1405361A1 |
| Устройство перемещения руки робота | 1980 |
|
SU905065A1 |
| Способ ориентации полупроводниковых подложек по базовому срезу и устройство для его осуществления | 1989 |
|
SU1775752A1 |
| Способ определения поверхностных свойств расплавов и устройство для его осуществления | 1990 |
|
SU1772691A1 |