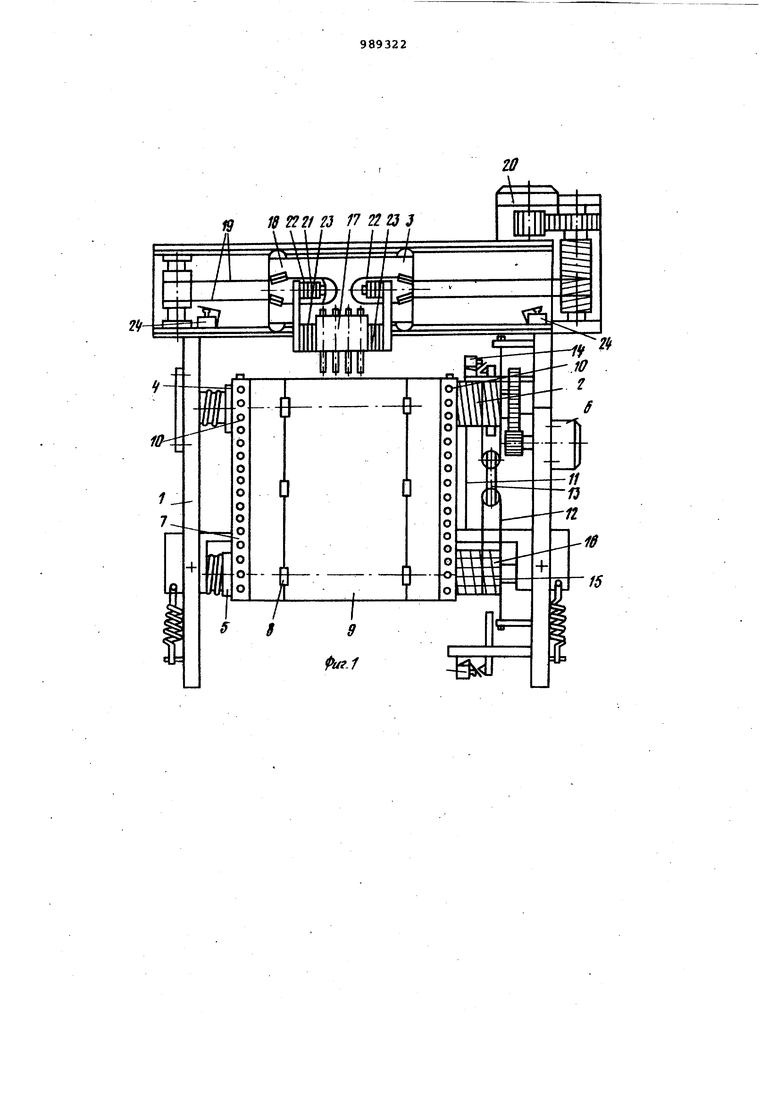
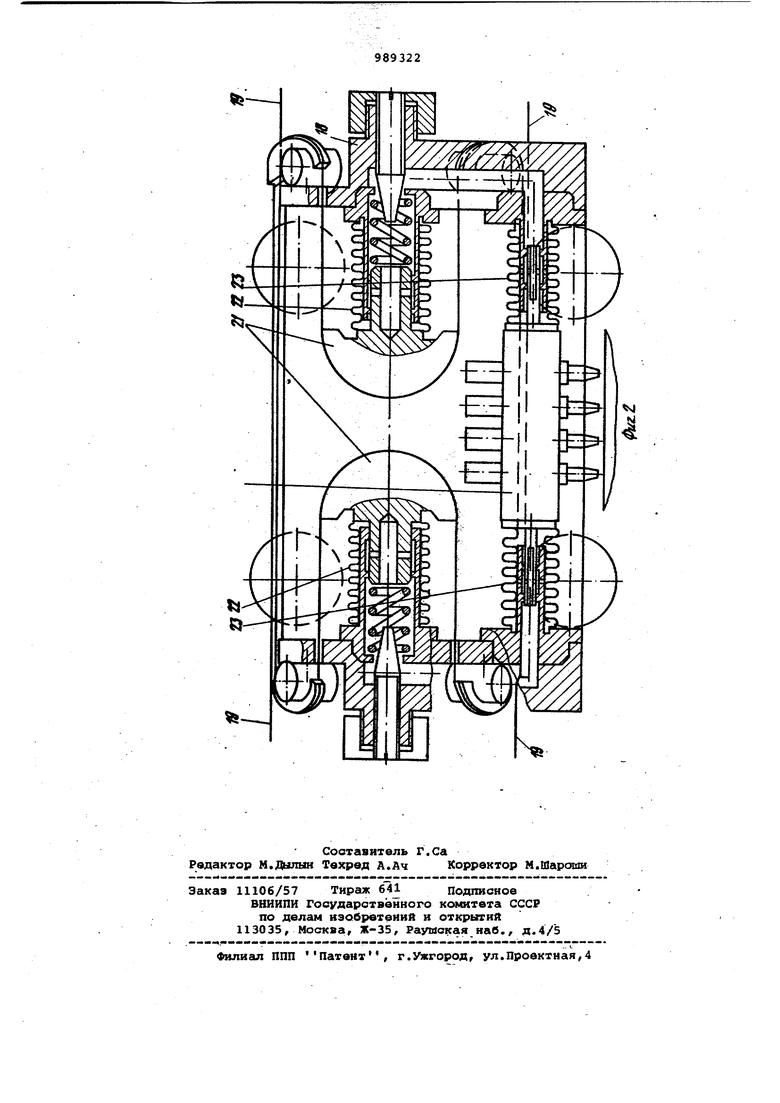
в результата чего снижается точност вычерчивания. Целью изобретения является повьш нив точности -вычерчивания. Цель достигается тем, что двухко ординатное чертежное устройство, со держащее основание, исполнительный механизм горизонтальной координаты, включающий соединенные с приводом б рабаны со штырями, охватываемые пер Ьорированной лентой, несущей носите записи графической информации, испо нительный механизм вертикальной координаты, включающий чертежную головку, установленную на каретке, со диненной посредством гибкой тяги с приводом, и датчики перемещения исполнительных механизмов, имеет разгрузочное приспособление, выполненное в виде охватывающей барабаны ги кой тяги, несущей подвижный упор для взаимодействия с датчиком перемещения исполнительного механизма горизонтальной координаты, и демпфи рующее приспособление, выполненное в виде чувствительных к силовому воздействию элементов, расположенны по обе стороны чертежной головки и жестко закрепленных на каретке для взаимодействия с гибкой тягой каретки и чертежной головкой, Демпфирующее приспособление може быть выполнено в виде сообщающихся сильфонов. На фиг,1 показано двухкоординатнов чертежное устройство (конструктивная схема), вид спереди; на фиг. .разгрузочное устройство исполнитель ного механизма вертикальной координаты, продольный разрез. Двухкоординатное чертежное устрой ство {фиг.1) содержит основание i, на котором расположены механизм 2 горизонтальной координаты X и исполнительный механизм 3 вертикальной координаты 9 . Исполнительный механизм 2 координаты jC имеет малоинерционные барабаны 4 и 5 с приводом 6 (редуктор, электродвигатель), охватывающую барабаны ленту 7 с перфорационными отверстиями. На ленте 7 подвижно закреплен с помсяцью липкой ленты 8 носитель эа,. писи графической информации - черте ная бумага 9. Ведущий барабан 4 име ет по краям штыри 10, взаимодайству щив с перфорированными отверстиями ленты 7. Исполнительный механизм 2 имеет также разгрузочное приспособл ние 11, выполненное в виде охватыва щей барабаны 4 и 5 гибкой тяги - Р са 12, несущей подвижный упор 13, взаимодействующий в крайних точках рабочего поля по оси координат X с датчиками перемещения 14 ленты 7 Датчиками перемещения могут служить обычные концевые выключатели. При этом ведомый барабан 5 выполнен составным: к нему жестко крепится разрезной диск 15, в который уложен трос 12. Разрезной диск-15 сострит из секторов 16, имеющих радиальные пазы. Сектора 16 крепятся к бараба- . ну 5 с помадью винтов (не показаны) ii Исполнительный механизм 3 координаты имеет чертежную головку 17 (фиг.2), расположенную на каретке 18, взаимодействукяцей посредством Гибкой тяги-троса 19 с приводом 20 (редуктор, электродвигатель), разгрузочное приспособление 21, выполненное в виде чувствительных к силовому воздействию элементов - сообщающихря между собой сильфонов 22 и 23, расположенных по обе стороны чертежной головки 17 и жестко закрепленных на каретке 18 и взаимодействунлдих с тросом 19 и чертежной головкой 17. Исполнительный механизм 3 содержит также датчик перемещения 24 (фиг.1) каретки 18 с чертежной головкой 17. Датчики перемещения 24 расположены в крайних точках рабочего поля по оси координат V , причем также, как по оси координат X, ими могут быть обычные концевые выключатели. -, Устройство работает следукядим образом. Лента 7 (фиг.1) исполнительного механизма 2 координаты и чертежная головка 17 с кареткой 18 устанавливаются с пульса управления (не показан) в исходное (базовое) положение, определяемое при срабатывании датчиков перемещения 14 и 24 исполнительных механизмов 2 и 3. Один раз, во время наладки- подбирается необходимое передаточное отношение между барабанами 4и 5 путем перемещения секторов 16 в радиальном направлении и выбора необходимого диаметра разрезного диска 15 с последующей фиксацией секторов 16 к барабану 5. Эта операция выполняется для согласования движения барабанов 4 и 5 и ленты 7. Обычный режим работы устройства разгон - торможение. При вычерчивании по оси координат X программно управляемые сигналы подаются на привод 6, при этом приходят в движение барабан 4, лента 7 и барабан 5. Одновременно приходит в движение диск 15, жестко скрепленный с барабаном 5, при этом на диск 15 и барабан 5через трос 12 разгрузочного приспособления 11 передается тяговое усилие, направленное противоположно силе инерг ции барабана 5. За счет: этого лента 7 и ее перфорированные отверстия, взаимодействующие со штырями 10 барабана 4, разгружаются от действия силы и инерции барабана 5, воспринимаемой тросом 12 разгрузочного приспособления. При подаче по программе управляющих воздействия на чертежную головку 17 ее регистрирующий орган (перо) опускается и производит, вычерчивание линии на чертежной бумаге 9 по оси координат Xgв направлении движения ленты 7. Вычерчивание по оси координат ведется в области, ограниченной датчиками перемещения 14 ленты 7 В случае задания прогргшмой большего отрезка, чем предусмотрено размерами рабочего поля, в направлении оси координат X происходит отключение приводов 6 с помощью подвижного упора 13, взаимодействующего с датчиком перемещения 14, и возврат ленты 7с закрепленной чертежной бумагой 9 в базовое положение. При вычерчивании по оси координат программно управляемые сигналы подаются на привод 20 (фиг.1) , при это приходит в движение трос 19. Каретка 18, связанная с тросом 1, и чертежная головка 17, раслоложемная на каретке, эа счет инерционной силы остаются в первый момент на месте. Также на месте остается в тот же момент и деформирующее приспособление 21, закрепленное на каретке 18, расположенное симметрично по обе стороны чертежной головки 17 и взаимодействующее с чертежной головкой и тросом посердством сообщаиощихся сильфонов 22 и 23 (фиг.2). Трос 19при заданном ускорении оказывает давление на сильфов 22, расположенный справа или слева от чертежной головки 17 в зависимости от направления ее движения. Например, при движении каретки 18 с чертежной головкой 17 вправо сильфон 22 (фиг.2), расположенный слева, испытывает Дсшлвние со стороны троса 19, при этом он деформируется и его объем уменьшается, а в сильфоне 22, расположенном справа от чертежной головки 17, давление со стороны троса 19 уменьшается и давление в нем уменьшается. Жидкость или газ по каналу между cooбщaюlI{и бIся сильфонами 22 и 23 перетекает из сильфона 22 в сильфон 23, расположен ных слева от чертежной головки 17, из сильфона 23 в сильфон 22, располо женных справа от чертежной головки 17..При этом чертежная головка 17 пе ремещается в направлении движения каретки и относительно нее, компенсируя погрешность, возникшую в устройстве по оси координат у. Причем возникающие колебания гасятся за сче демпфирующих -свойств жидкости или га за. Выбрав необходимые параметры по жесткости сильфонов 22 и 23 во время наладки, можно свести возникающие погрешности (выбеги) практически к нулю. в случае задания пЕЮграммой большего отрезка, чем предусмотрено размерами рабочего поля, происходит от- ключение привода 20 при взаимодействии каретки 18 с датчиком перемещения 24 и каретка возвращается в базовое положение. Вычерчивание может производиться одновременно по осям координатХ и У. Предлагаемое-устройство нмеет сокую эффективность при вычерчивании со. скоростью до 0,7 м/с и про-граммируемом ускорении до 9,81 м/с-, при этом повышается точность вычерчивания при- динамической погрешности 40,1 мм. Формула изобретения 1.Двухкоординатное чертежное устройство, содержащее основание, исполнительный механизм горизонталь|ной координаты, включающий- соединенНые с приводом барабаны со штырями, охватываемые перфорированной лентой, несущей носитель записи графической информации, исполнительный механизм вертикальной координаты, включающий чертежную головку, установленную на каретке, соеда1ненной посредством гибкой тяги с приводом, и датчики перем цания исполнительных механизмов, отличающееся тем, , с целью повышения точности вычерчивания, оно имеет разгрузочное приспособление ,v выполненное в виде охватываки11вй барабаны гибкой тяги, несущей подвижный упор для взаимодействия с датчиком перемещения исполнительного механизма горизонтгшьной координаты, и деформирующее приспособление, выполненное в виде чувствительных к силовому воздействию элементов, расположенных по обе сто- РОНЫ чертежной головки и жестко за- крепленных на каретке для взaи 4oдeй ствия с гибкой тягой каретки и чертёжной головкой. 2.Устройство по П.1, о т Ли ч аю щ е е с я тем, что демпфирующее приспособление выполнено в виде со-общахяпяхая сильфонов. Источники информации, принятые во внимание при экспертизе : 1. Патент Великобритании № 146232 1 кл 6013) 9/38, 1977 (прототип). ig 18 2221 /J 17 2223 3
| название | год | авторы | номер документа |
|---|---|---|---|
| Чертежный прибор | 1989 |
|
SU1733273A1 |
| Устройство ввода-вывода графической информации | 1980 |
|
SU905648A1 |
| Двухкоординатный графопостроитель | 1991 |
|
SU1833901A1 |
| Пишущая головка автоматического чертежного устройства | 1979 |
|
SU870929A1 |
| Чертежный прибор Шелкоплясовых | 1985 |
|
SU1279869A1 |
| ЧЕРТЕЖНАЯ ДВУХКООРДИНАТНАЯ МАШИНА С ПРОГРАММНБ1М УПРАВЛЕНИЕМ | 1970 |
|
SU288593A1 |
| Координатное устройство к чертежному прибору | 1980 |
|
SU908622A1 |
| Прибор для вычерчивания панорамных проекций | 1986 |
|
SU1397312A1 |
| Графопостроитель | 1983 |
|
SU1150483A1 |
| Автомат присоединения выводов | 1982 |
|
SU1089866A1 |