(54) ПРИВОД ЗАПОРНОЙ АРМАТУРЫ
| название | год | авторы | номер документа |
|---|---|---|---|
| Привод запорной арматуры | 1980 |
|
SU934091A1 |
| Приводное устройство | 1984 |
|
SU1180629A1 |
| Приводное устройство | 1983 |
|
SU1086276A1 |
| КРАН | 1996 |
|
RU2127390C1 |
| Приводное устройство | 1984 |
|
SU1161768A2 |
| Приводное устройство | 1981 |
|
SU1008551A1 |
| Запорное устройство | 1980 |
|
SU868223A1 |
| Электропривод с ручным дублером | 1982 |
|
SU1142685A1 |
| Устройство для балансировки шлифовального круга | 1981 |
|
SU974175A1 |
| Устройство для закрепления грузов в скважине | 1981 |
|
SU1033721A1 |
Изобретение относитсяК машиностроению и может быть использовано в качестве приводного устройства в запорной арматуре.
Известен привод зёшорной а ялатуры, содержащий корпус, размещенные в нем шпиндель, резьбовую втулку шпинделя, взаимодействующие с ней рычаги и маховик/ состоящий из ступицы с отверстиями и сопряженной с ней втулки с резьбой, и воздействующий на нее фиксатор, который выполнен шариковым С11.
Недостатком этого привода является низкая надежность шарикового фиксатора, а применение нескольких шариковых фиксаторов значительно усложнит конструкцию.
Цель изобретения - повыиение надежности работы привода.
Для достижения указанной цели привод запорной арматуры, содержащий корпус, размещенные в нем шпиндель, резьбовую втулку шпинделя, взаимодействукицие с ней рычаги и маховик, состоящий из ступицы с отверстиями и сопряженной с ней втулки с резьбой, и воздействующий на нее фиксатор, снабжен установленными на шпинделе регулируемыми упорами, а фиксатор выполнен в виде подпружиненных в осевом направлении и взаимно перпендикулярных стержней, один из которых взаимодействует с отверстиями ступицы и имеет кольцевую проточку, а другой взаимодействует с последней и упорами.
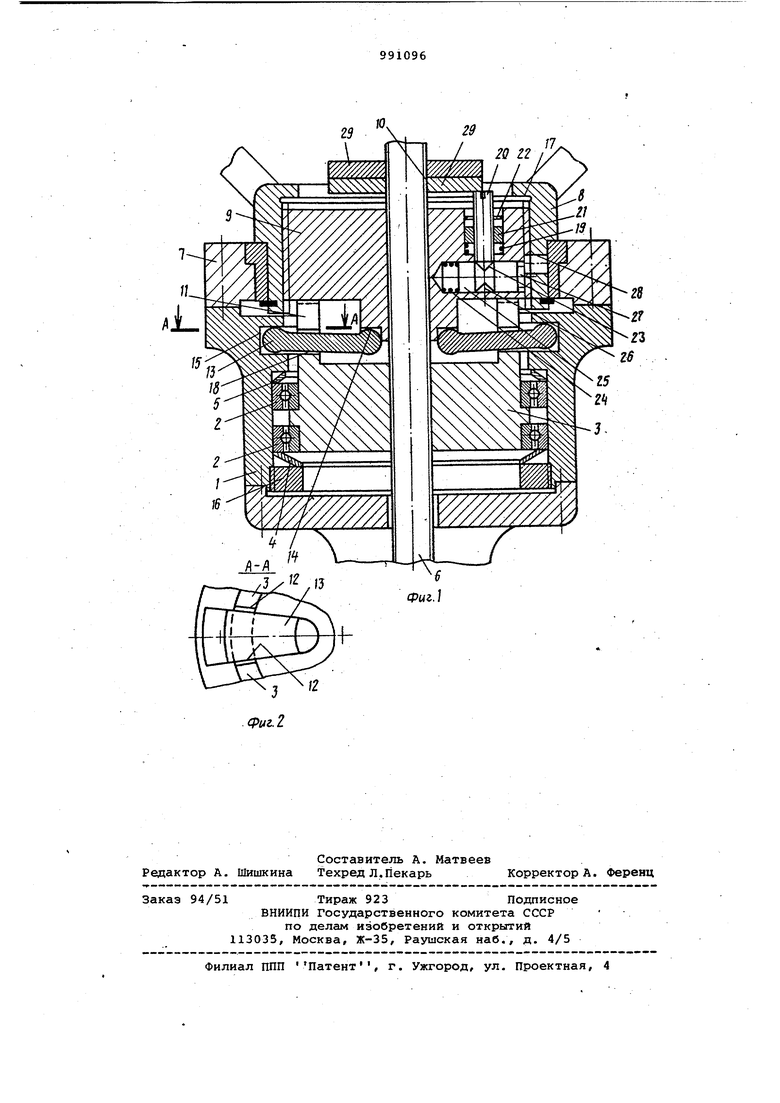
На .фиг.1 изображен предлагаемый .привод, общий вид; на фиг.2 - раз10рез А-А на фиг.1.
В корпусе 1 на подшипниках 2 установлена резьбовая втулка 3, подпружиненная упругими элементами 4 и 5 и взаимодействующая со шпинде15лем 6. В расточке крышки 7 корпуса 1 установлен маховик, выполненный составным из ступицы 8 с отверстиями и 1 сопряженнойUс ней втулки 9 с резьбой, внутренняя поверхность 10
20 которой не имеет резьбы. Втулка 9 соединяется с помощью кулачков II с кулачками 12 резьбовой втулки 3. В радиальных пазах резьбовой втулки 3 размещены рычаги 13, взаимодей25ствующие периферийной частью с торце 14 втулки 9 .маховика.Рычаги 13 периферийной частью шарнирно связаны с кольцевым пазом 15 корпуса 1. Степень поджатия упругих элементов 4
30 и 5 регулируется гайкой 16. В ступице маховика выполнен упор 17. Рычаги 13 средней частью взаимодействуют с буртом 18 втулки 3. Во втулке 9 установлен подпружиненный пружиной 19 стержень 20 с навинченной на него втулкой 21 и ограниченный от аксиального перемещения вверх кольцом 22. На нижнем конце стержня 20 выполнен конус 23. Во втулке 9 установлен подпружиненный пружиной 24 второй стержень 25, в к тором в средней части выполнена кол цевая проточка с конусными поверх- ностями 26. На одном из торцов стер ня 25 выполнен кулачок 27. Стержни 20 и 25 представляют собойфиксатор В ступице 8 выполнено отверстие 28, диаметр которого равен диаметру кулачка 27. На шпинделе б установлены регулируемые упоры 29. Привод работает следующим образом. , При вращении ступицы В маховика в сторону открытия прохода арматуры втулка 9 маховика перемещается поступательно вверх, приэтом происходит снятие нагрузки с внутренней части рычагов 13, взаимодействую1цих с торцом 14. Рычаги 13, поворачиваяс вокруг опоры в пазу 15 корпуса 1, снимают осевую нагрузку с бурта 18 резьбовой втулки 3, которая вместе со шпинделем 6 под действием упругого элемента 4 перемещается вверх, срывая золотник с посадочной (уплот нительной) поверхности арматуры (не показаны). Втулка 9 маховика переме щается поступательно вверх до момен та упора верхней торцовой ее поверх ности в упор 17 ступицы 8. При перемещении ипинделя 6 вместе с резь бовой втулкой 3 под действием упругого элемента 4 вверх упоры 29, такж перемещаясь вверх, снимают нагрузку со стержня 20, который под действием пружины 19 перемещается вверх до упора втулки 2l в кольцо 22. При этом конус 23 стержня 20 выходит из зацепления с конусными поверхностями 26 стержня 25, который под действием пружины 24 входит кулачком 27 в отверстие 28, тем самым подготовив привод для передачи движения в сторону закрытия. После упора верхней торцовой поверхности втулки 9 в упор 17 ступицы 8обе части маховика начинают вращаться с одинаковой угловой скоростью. При этом кулачки 11 втулки 9захватЕлвают через кулачки 12 резьбовую втулку 3 шпинделя б, которая, вращаясь, перемещает шпиндель б вверх. Втулка 3 вращается вместе с рычагами. 13, При вращении маховика в сторону закрытия вращение передается через кинематическую связь: ступица 8, кулачок 27, втулка 9, кулачки 11 и 12, резьбовая втулка 3, шпиндель б. При достижении упорами 29 настроенного положения (когда золотник не доходит до уплотнительной поверхности арматуры на 2-10 мм, в зависимости от настройки втулки 21) упоры 29 нажимают на стержень 20, который, в свою очередь, конусом 23 взаимодействует с конусной поверхностью 26, смещая стержень 25 внутрь привода и выводя кулачок 27 из зацепления с отверстием 28 ступицы 8 . Ступица 8 маховика начинает проворачиваться по отношению к втулке 9, одновременно перемещая ее вниз без вращения. При этом торец 14 втулки 9 нажимает на рычаги 13, которые, в свою очередь, нажимают сред ней частью на бурт 18 резьбовой втулки 3, перемещая ее вместе со шпинделем б вниз с большим усилием, пропорциональным соотношению плеч рычагов 13. Изобретение позволит упростить конструкцию привода запорной арматуры и повысит надежность его работы. Формула изобретения Привод запорной арматуры, содержащий корпус, размещенные в нем шпиндель, резьбовую втулку шпинделя, взаимодействующие с ней рычаги и маховик, состоящий из ступицы с отверстиями и сопряженной с ней втулки с резьбой, и воздействующий на .нее фиксатор, отличающийся тем, что, с целью повышения .надежности он снабжен установленными на шпинделе регулируемыми упорами, фиксатор выполнен в виде подпружиненных в осевом направлении и взаимно перпендикулярных стержней, один из которых взаимодействует с отверстиями ступицы и имеет кольцевую проточку, а другой взаимодействует с последней и упорами. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР по заявке № 2994350/25-28, кл. F 16 Н 25/20, 1980 (прототип).
