1
Изобретение относится к электротехнике и может быть использовано в управляемых электроприводах общепромьшшенного назначения, построенных , на базе асинхронного двигателя с короткозамкнутым ротором, к которым предъявляются высокие требования по Точности и качеству управления.
Известен электропривод переменного тока на базе асинхронного двигат теля с короткозамкнутым ротором, содержащий блок задания тока, подключенный через управляекий источник тока к обмоткам статора асинхронного двигателя, а также формирователь опорных сигналов, выполненный в виде управляемого генератора колебаний , выходы которого подключены к входам для гармонических функций управляемого источника тока, а входы через сумматор частот - к выходам датчика скорости вращения и формирователя частоты токов ротора С Точность формирования опорных сигналов в электроприводе, а следовательно точность управления момента на валу двигателя, определяется здесь выходными сигналами датчика скорости вращения и формирователя частоты токов ротора. В известном
электроприводе предусмотрена .коррек дня выходного сигнала формирователя частоты токов ротора по сигналу с датчика момента, однако это не обеспечивает сохранения линейности изменения момента от сигнала задания при погрешностях, вносимых, датчиком скорости вращения.
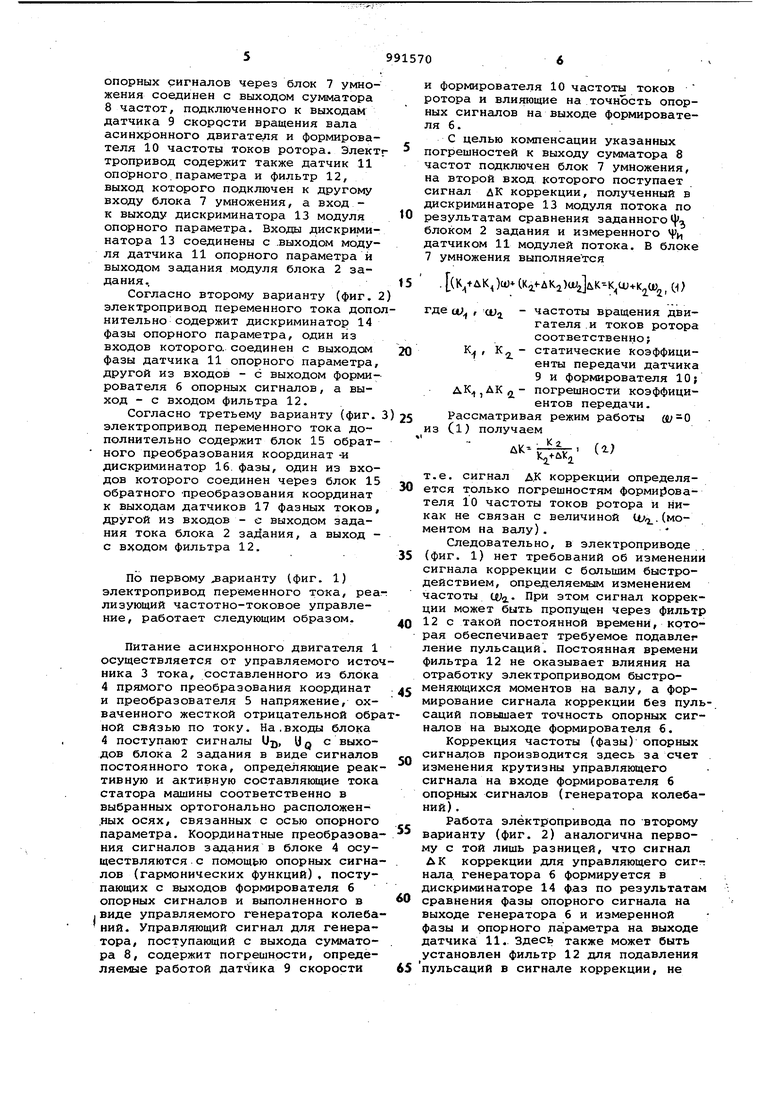
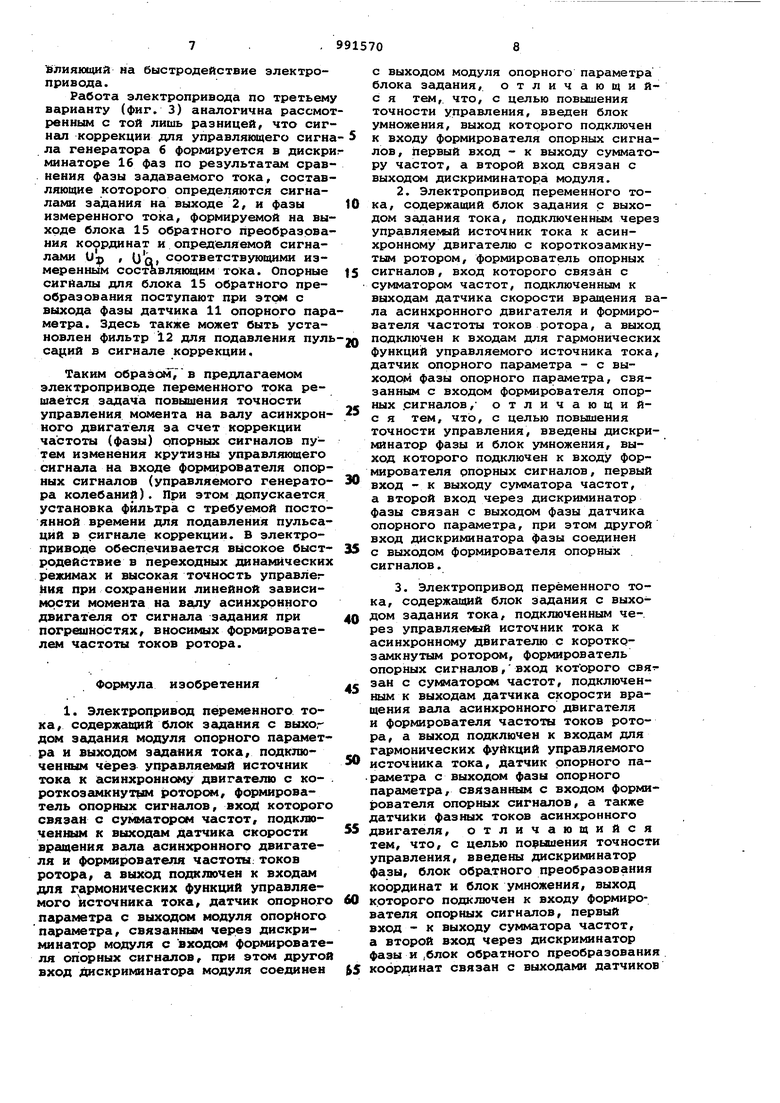
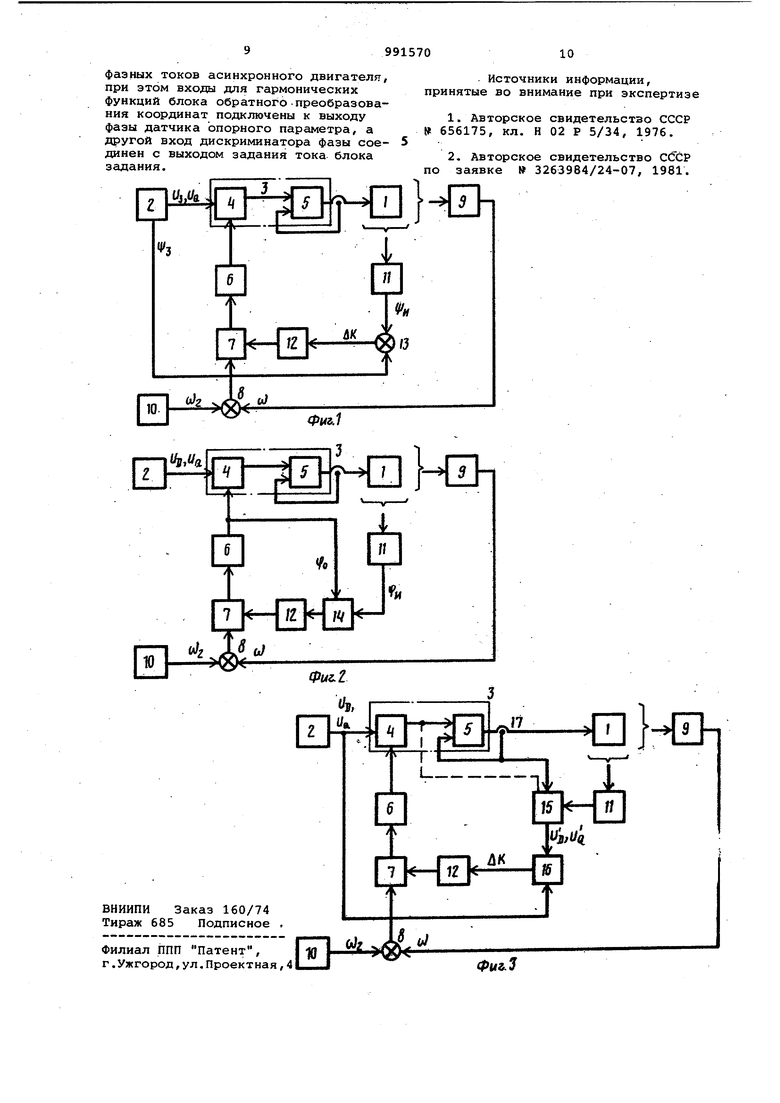
Наиболее близким к изобретению техническим решением является электропривод переменного тока, содержащий блок задания с выходом задания модуля опорного параметра и вьЬсодом задания тока, подключенным через управляемой источник тока к асинхроннедау двигателю с короткозамкнутам ротором, фо1 ирователь опорных сигналов, вход которого связан с сумматором частот, подключеннш к выходам датчика скорости вращения вала асинхронного двигателя и формиЕювателя частоты токов ротора, а выход подключен к входам для гармонических функций управляемого источника тока, датчик опорного параметра с выходом модуля опорного параметра, связанным через дискриминатор модуля с эходом формирователя опорных сигналов, при этом другой вход дискриминатора модуля соединен с выходом модуля опорного параметра блока за дания С2 . В указанном известном электроприводе осуществляется „коррекция частоты опорных сигналов с учетом погрешностей, вносимых датчиком ско рости вращения и формирователем час тоты токов ; ротора, по результатам сравнения заданной и измеренной амплитуд потока асинхронного двигателя. Анализ работы электропривода, на пример, в режимах со скоростями вращения, близкими к нулю, показывает что сигнал коррекции в этом случае определяется не только погрешностями формирователя частоты токов ротора, но и величиной частоты токов ротора (требуемым моментом на валу Это означает, что в случае изменения сигнала задания тока и частоты токов ротора (момента на валу), а также при ударном изменении момента нагрузки, сигнал коррекции должен формироваться с таким же быстродействи м, с каким формируется момент В электроприводах с регулировани ем тока статора и частоты токов ротора формирование момента на валу происходит практически без запаздываний- и, следовательно, без запазды ваний должен формироваться сигнал коррекции. С другой стороны получение сигна ла коррекции без пульсаций возможно только при наличии фильтра с достаточно большой постоянной времени Сигнал коррекции не должен содержат пульсаций потому, что он воздействует на вход быстродействующего (широкополосного) формирователя опорных сигналов. При наличии даже небольшого уровня пульсаций в сигна ле коррекции происходят фазовые искажения опорных сигналов и наруша ется линейная зависимость момента от сигнала задания. Пульсации в сиг нале коррекции имеют место потому, что модуль потока в датчике опорног параметра формируется путем выпрямления на частоте вращения. Таким образом, коррекция частоты опорных сигналов (частоты токов статора) в известном электроприводе осуществляется при противоречивых требованиях: с одной стороны без запаздываний с целью отработки быст роменяющихся моментов на валу, с другой стороны - с фильтрацией сигнала на выходе дискриминатора амплитуды. На практике возможно тольк компромиссное решение, которое не обеспечивает желаемой коррекции опорных сигналов в переходных режимах, а следовательно, и точности управления момента на валу, что является недостатком известного электропривода. Целью изобретения является повышение точности управления электропривода за счет коррекции выхода формирователя опорных сигналов при сохранении линейной зависимости момента на валу асинхронного двигателя от сигнала задания. Указанная цель достигается тем, что в электроприводе переменного тока по первому варианту введены блок умножения, выход которого подключен к входу формирователя опорных сигналов, первый вход - к выходу сумматора частот, а второй вход связан с выходом дискриминатора амплитуды. В электропривод по второму варианту введены дискриминатор фазы и блок умножения, выход которого подключен к входу формирователя опорных сигналов, первый вход - к выходу сумгматора частот, а второй вход через дискриминатор фазы связан с выходом фазы датчика опорного параметра, при этом другой вход дискриминатора фазы соединен с выходе формирователя опорных сигналов. В электропривод по третьему варианту введены дискриминатор фазы, блок обратного преобразования координат и блок умножения, выход которого подключен ко входу формирователя опорных сигналов, первый вход к выходу сумматора частот, а второй вход через дискриминатор фазы и блок обратного преобразования координат связан с выходом датчиков фазных токов асинхронного двигателя, при этом входы для гармонических функций блока обратного преобразования координат подключены к выходу фазы датчика опорного параметра, а другой вход дискриминатора фазы соединен с выходом задания тока блока задания . На фиг. 1-3 представлены варианты выполнения электропривода переменного тока. Согласно первому варианту (фиг. 1) электропривод переменного тока содержит асинхронный двигатель 1 с короткозамкнутым ротором, подключен- , ный к выходу блока 2 задания через управляемый источник 3 тока, составленный из блока 4 прямого преобразования координат и преобразователя 5 напряжения, охваченного жесткой отрицательной обратной связью по току. Ко входам для гармонических функций управляемого источника 3 тока (блока 4 прямого преобразования координат) подключены выходы формирователя 6 опорных сигналов, выполненного а виде управляемого генератора колебаний. Вход формирователя 6 опорных сигналов через блок 7 умножения соединен с выходом сумматора 8 частот, подключенного к выходам датчика 9 скорости вращения вала асинхронного двигателя и формирователя 10 частоты токов ротора. Элект тропривод содержит также датчик 11 опорного.параметра и фильтр 12, выход которого подключен к другому входу блока 7 умножения, а вход к выходу дискриминатора 13 модуля опорного параметра. Входы дискриминатора 13 соединены с .выходом модуля датчика 11 опорного параметра и выходом задания модуля блока 2 задания.. Согласно второму варианту (фиг. 2 электропривод переменного тока допо нительно содержит дискриминатор 14 фазы опорного параметра, один из входов которого, соединен с выходом фазы датчика 11 опорного параметра, другой из входов - с выходом формирователя б опорных сигналов, а выход - с входом фильтра 12. Согласно третьему варианту (фиг. электропривод переменного тока дополнительно содержит блок 15 обратного преобразования координат -и дискриминатор 16. фазы, один из входов которого соединен через блок 15 обратного -преобразования координат к выходам датчиков 17 фазных токов, другой из входов - с выходом задания тока блока 2 задания, а выход с входом фильтра 12. По первому варианту (фиг. 1) электропривод переменного тока, реа лизующий частотно-токовое управление, работает следующим образом. Питание асинхронного двигателя 1 осуществляется от управляемого исто ника 3 тока, составленного из блока 4 прямого преобразования координат и преобразователя 5 напряжение, охваченного жесткой отрицательной обр ной связью по току. На.входы блока 4 поступают сигнгшы O-Q, UQ с выходов блока 2 задания в виде сигналов постоянного тока, определякмдие реак тивную и активную составляющие тока статора машины соответственно в выбранных ортогонально расположен.ных осях, связанных с осью опорного параметра. Координатные преобразова ния сигналов задания в блоке 4 осуществляются с помощью опорных сигна лов (гармонических функций), поступающих с выходов формирователя 6 опорных сигналов и выполненного в ,виде управляемого генератора колеба НИИ. Управляющий сигнал для генератора, поступающий с выхода сумматора 8, содержит погрешности, определяемые работой 9 скорости и формирователя 10 частоты токов ротора и влияющие на точность опорных сигналов на выходе формирователя 6. С целью компенсации указанных погрешностей к выходу сумматора 8 частот подключен блок 7 умножения, на второй вход которого поступает сигнал дК коррекции, полученный в дискриминаторе 13 модуля потока по результатам сравнения заданного ф блоком 2 задания и измеренного Ни датчиком 11 модулей потока. В блоке 7 умножения выполняется .()u)(K,i+-AKj)(ju+K,cy,j,CO где о; , cui - частоты вращения двигателя .и токов ротора соответственно; К , к 2 - статические коэффициенты передачи датчика 9 и формирователя 10; ,- погрешности коэффициентов передачи. Рассматривая режим работы аи-О из (1) получаем дК т.е. сигнал Д.К коррекции определяется только погрешностям форми }ователя 10 частоты токов ротора и никак не связан с величиной {f,j. (моментом на валу). Следовательно, в электроприводе (фиг. 1) нет требований об изменении сигнала коррекции с большим быстродействием, определяемым изменением частоты При этом сигнал коррекции может быть пропущен через фильтр 12 с такой постоянной времени, которая обеспечивает требуемое подавлег ление пульсаций. Постоянная времени фильтра 12 не оказывает влияния на отработку электроприводом быстроменяющихся моментов на валу, а формирование сигнала коррекции без пульсаций повышает точность опорных сигналов на выходе формирователя б. Коррекция частоты (фазы) опорных сигналов производится здесь за счет . изменения крутизны управляющего сигнала на входе формирователя 6 опорных сигналов (генератора колебаний) . Работа электропривода по второму варианту (фиг. 2) аналогична первому с той лишь разницей, что сигнал А К коррекции для управляющего сигтт нала, генератора б формируется в дискриминаторе 14 фаз по результатам сравнения фазы опорного сигнала на выходе генератора б и измеренной фазы и опорного параметра на выходе датчика 11. Здесь также может быть установлен фильтр 12 для подавления пульсаций в сигнале коррекции, не
влияющий на быстродействие электропривода.
Работа электропривода по третьему варианту (фиг. 3) аналогична рассмотренным с той лишь разницей, что сигнал коррекции для управляющего сигна ла генератора б формируется в дискри минаторе 16 фаз по результатам сравнения фазы задаваемого тока, составляющие которого определяются сигналами задания на выходе 2, и фазы измеренного тока, формируемой на выходе блока 15 обратного преобразования координат и определяемой сигналами Uj) , OQ, соответствующими измеренным составляк цим тока. Опорные сигналы для блока 15 обратного преобразования поступают при этом с выхода фазы датчика 11 опорного параметра. Здесь также может быть установлен фильтр 12 для подавления пуль саций в сигнале коррекции.
Таким o6pa3Oh47B предлагаемом электроприводе переменного тока решается задача повышения точности управления момента на валу асинхронного двигателя за счет коррекции частоты (фазы) опорных сигналов путем изменения крутизны управляющего сигнала на входе формирователя опорных сигналов (управляемого генератора колебаний). При этом допускается установка фильтра с требуемой постоянной времени для подавления пульсаций в сигнале коррекции. В электроприводе обеспечивается высокое быстродействие в переходных динамических режимах и высокая точность управлег Нин при сохранении линейной зависимости момента на валу асинхронного двигателя от сигнгша задания при погрешностях, вносимых формирователем частоты токов ротора.
Формула изобретения
45
1. Электропривод переменного тока, содержащий блок задания с выхог дом задания модуля опорного паргшетра и выходом задания тока, подключенным через управляемый источник тока к асинхронному двигателю с короткозсшкнут лм ротором, формирователь опорных сигналов, вход которого связан с сумматором частот, подключенным к выходам датчика скорости вращения вгша асинхронного двигателя и формирователя частоты:токов ротора, а выход подключен к входам для гармонических функций управляемого источника тока, датчик опорного параметра с выходом модуля опорного параметра, связанным через дискриминатор модуля с входом формирователя опорных сигналов, при этом другой вход дискриминатора модуля соединен
с выходом модуля опорного параметра блока задания, отличающийс я тем, что, с целью повышения точности управления, введен блок умножения, выход которого подключен к входу формирователя опорных сигналов, первый вход - к выходу сумматору частот, а второй вход связан с выходом дискриминатора модуля.
2.Электропривод переменного тока, содержащий блок задания с выходом задания тока, подключенным через управляемый источник тока к асинхронному двигателю с короткозамкнутым ротором, формирователь опорных сигналов, вход которого связан с сумматором частот, подключенным к выходам датчика скорости вращения вала асинхронного двигателя и формирователя частоты токов ротора, а выход подключен к входам для гармонических функций управляемого источника тока, датчик опорного параметра - с выходе фазы опорного параметра, связанным с входом формирователя опорных .сигналов, отличающийс я тем, что, с целью повышения точности управления, введены дискриминатор фазы и блок умножения, выход которого подключен к входу формирователя опорных сигналов, первый вход - к выходу сумматора частот, а второй вход через дискриминатор фазы связан с выходом фазы датчика опорного параметра, при этом другой вход дискриминатора фазы соединен с выходом формирователя опорных сигналов.
3.Электропривод переменного тока, содержащий блок задания с выходом задания тока, подключенным через управляекЕ:1й источник тока к асинхронному двигателю с короткозамкнутым ротором, формирователь
опорных сигналов , вход КОТОРОГО СВЯ;зан с сумматором частот, подключенным к выходам датчика скорости вращения вала асинхронного двигателя и формирователя частоты токов ротора, а выход подключен к входам для гармонических фуйкций управляемого источника тока, датчик опорного параметра с выходом фазы опорного параметра, связанным с входом формирователя опорных сигналов, а также датчики фазных токов асинхронного двигателя, отличающийся тем, что, с целью повышения точности управления, введены дискриминатор фазы, блок обратного преобразования координат и блок умножения, выход которого подключен к входу формирователя опорных сигналов, первый вход - к выходу сумматора частот, а второй вход через дискриминатор фазы и ,блок обратного преобразования координат связан с выходами датчиков

| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод с асинхронной машиной с фазным ротором | 1979 |
|
SU1108597A2 |
| Устройство для частотного управления электроприводом | 1982 |
|
SU1089749A1 |
| Электропривод с асинхронной машиной с фазным ротором | 1975 |
|
SU610275A1 |
| Асинхронный электропривод с частотно-токовым управлением | 1984 |
|
SU1239824A1 |
| Частотно-управляемый электропривод | 1987 |
|
SU1453576A1 |
| Электропривод переменного тока с частотно-токовым управлением | 1985 |
|
SU1310990A1 |
| Электропривод переменного тока | 1979 |
|
SU849404A1 |
| Устройство для управления асинхронным электродвигателем | 1989 |
|
SU1663734A1 |
| Электропривод переменного тока | 1986 |
|
SU1372578A1 |
| Электропривод с асинхронной машиной с фазным ротором | 1976 |
|
SU675567A1 |
