(54) УСТРОЙСТВО ДЛЯ ПЕРЕДВИЖЕНИЯ ПО НАРУЖНОЙ ПОВЕРХНОСТИ ТРУБОПРОВОДА
| название | год | авторы | номер документа |
|---|---|---|---|
| Подъемно-транспортная система | 1986 |
|
SU1418246A1 |
| Устройство для перемещения по трубопроводу | 1989 |
|
SU1743953A1 |
| Передвижной стенд для сталеразливочных ковшей | 1982 |
|
SU1091990A1 |
| Устройство для натяжения тягового органа колесного транспортного средства | 1983 |
|
SU1144916A1 |
| АГРЕГАТ ДЛЯ УКЛАДКИ ОПТОВОЛОКОННОГО КАБЕЛЯ НА ПРОВОД ВОЗДУШНОЙ ЛИНИИ ЭЛЕКТРОПЕРЕДАЧ | 1996 |
|
RU2124256C1 |
| СПОСОБ ПЕРЕМЕЩЕНИЯ ГРУЗОВ И ПОДЪЕМНО-ТРАНСПОРТНОЕ УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1995 |
|
RU2078934C1 |
| Тяговое устройство для подвесных монорельсовых дорог | 1982 |
|
SU1164119A1 |
| Машина для мытья полов | 1979 |
|
SU992015A1 |
| УСТРОЙСТВО МАНЕВРОВОЕ | 2007 |
|
RU2357885C1 |
| Кресло-коляска | 1988 |
|
SU1676621A1 |

1
Изобретение относится к строительной технике и может быть использовано в сочетании с грунтоподкопным, очистным и изоляционным оборудованием, с устройствами для подъема и поддержания трубопроводов при, строительстве и ремонте, а также в случаях применения устройства в качестве транспортного средства, использующего трубопровод в качестве монорельса.
Известно устройство для передвижения по наружной поверхности, содержащее раму, колесно-ходовой механизм с приводом, выполненный в виде прижимных роликов, установленных на траверсах, и захватный орган 1.
Недостатком известного устройства является невозможность изменения усилия прижатия приводных роликов в движении.
Цель изобретения - уменьшение энергозатрат на перемещение и изменения тягового усилия в зависимости от угла наклона трубопровода.
Поставленная цель достигается тем, что захватный орган выполнен в виде П-ебразной рамы с опорными роликами на оси, установленной напротив упомянутой рамы, охватывающей трубопровод снизу с возможностью продольного смещения относительно последней, а на оси по обеим сторонам от колеса смонтированы двуплечие рычаги, одним.плечом кинематически связанные с зубчатым сектором, а другим - с колесно-ходовым механизмом, причем на раме установлена зубчатая рейка для взаимодействия с упомянутым сектором.
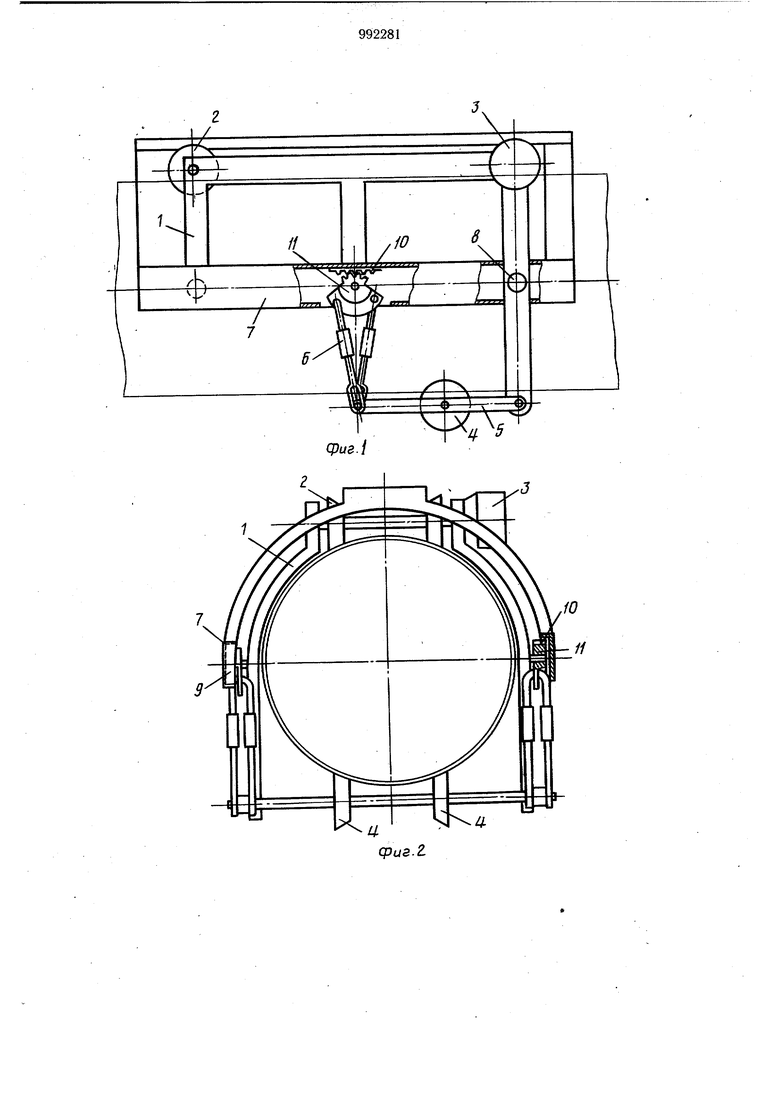
На фиг. 1 изображено устройство, общий вид; на фиг. 2 - то же, вид сбоку; на фиг. 3 - положение механизма сочле10нения и захватного органа в положении без смещения; на фиг. 4 - то же, со смещением рам относительно друг друга.
Устройство для передвижения включает приводную раму 1 с колесным ходовым ме15 ханизмом 2, приводом 3 и поддерживающим механизмом, выполненным в виде прижимных роликов 4, установленных на поворотных двуплечих рычагах 5, подвижные концы которых соединены с. подпружиненными 2Q тягами 6, и П-образную раму 7.
Приводная рама 1 опорными роликами
8установлена в продольных направляющих
9П-образной рамы 7 и сочленена посредством реек 10 с зубчатыми колесами 11 с цапфами, установленными на П-образной раме
7 и соединенными тягами б с подвижными концами рычагов 5.
Устройство работает следующим образом.
При движении по горизонтальному участку трубопровода, когда относительного смещения рам 1 и 7 не происходит, например в случае транспортного перемещения устройств, кинематическая цепь «рейки - зубчатые колеса - тяги - траверсы с роликами находится в свободном, не создающем дополнительного усилия прижатия к трубе колесйо-ходовы.м механизмом 2 и роликов 4, положении, т. е. не изменяет величины тягового усилия и не создает дополнительного сопротивления движению.
При движении устройства на подъем или когда сопротивление на раме 7, например от установленных на ней рабочих органов, приводит к смещению ее относительно приводной рамы 1 в направлении обратном движению устройства (фиг. 4) зубчатые колеса 11 поворачиваются и через тяги 6 и рычаги 5 создают дополнительное усилие прижатия ходовых колес и роликов 4, увеличивая тем самым тяговое усилие.
При движении под уклон рама 7 смещается относительно приводной рамы 1 в направлении движения, зубчатые колеса 11 поворачиваются и через тяги 6 и рычаги 5 создают дополнительное усилие прижатия колесно-ходовым механизмом 2 и прижимных роликов 4 к трубопроводу, достаточное для обеспечения необходимого сцепления их с трубопроводом и движения устройства без проскальзывания ходовых колес.
При, движении устройства под уклон, когда установленный на рабочую раму рабочий орган оказывает сопротивление перемещению и если это сопротивление равно тяговому усилию с учетом наклона трубопровода, то упомянутая кинематическая цепь также находится в свободном положении.
В зависимости от назначения устройства и предъявляемых к нему требований интервалы величины тяговых усилий могут меняться, например, за счет изменения соотнощения плеч рычагов 5 или изменения эксцентриситета установки цапф зубчатых колес 11.
Устройство позволяет без введения Дополнительных устройств и специальных для этих целей механизмов автоматически, без остановки технологического процесса строительства или ремонта, изменять, в зависимости от угла Наклона трубопровода, тяговое усилие, оптимизировать энергозатраты и работу машины в целом.
Формула изобретения
Устройство для передвижения по наружной поверхности трубопровода, содержащее раму, колесно-ходовой механизм с приводом, выполненный в виде прижимных роликов, установленных на траверсах, и захватный орган, отличающееся тем, что, с целью уменьшения энергозатрат на перемещение и изменения тягового усилия в зависимости от угла наклона трубопровода, захватйый орган выполнен в виде П-образной рамы с опорными роликами на оси, установленной напротив упомянутой рамы, охватывавдщей трубопровод снизу с возможностью продольного смещения относительно последней, а на оси по обеим сторонам от колеса
0 смонтированы двуплечие рычаги, одним плечом кинематически связанные с зубчатым сектором, а другим - с колесно-ходовым механизмом, причем на раме установлена зубчатая рейка для взаимодействия с упомянутым сектором.
Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 531772, кл. В 61 F 3/00, 1975 (прототип).
