Изобретение относится к подъемно- транспортным системам для работы в стесненных условиях, например в складских помещениях, на строитель- ых. площадках, в трюмах судов, в выработках угольных шахт, где требуется обеспечить экономное сопряжение горизонтальных и вертикальных трасс вижения.
Цель изобретения - повышение наежности в работе подъемно-транспортой системы.
На фиг.1 изображена подъемно- транспортная система, общий вид; на иг.2 - то же, вид сверху.
Подъемно-транспортная система состоит из самоходных грузонесущих платорм 1, каждая из которых снабжена еханизмом передвижения .с шарнирно- ычажной рамой и направляю1 их четыех типов: основных и дополнительных горизонтальных направляющих и основных и дополнительных вертщ-сапьных направляющих. Основные горизонтальные направляющие 2 расположены поэтажно , а основные вертикальные напавляющие 3 - по концам основных горизонтальных направляющих 2 с вертикальным и горизонтальным зазором. В вертикальном з азоре располагаются платформы 1 при переходе с основных горизонтальных направляющих 2 на основные вертикальные направляющие 3. В горизонтальном зазоре смонтировано устройство для.перевода грузонесу- щих платформ 1- с основных вертикальных направляющих 3 на основные гори- зонтэльные направляющие 2.
Оно выполнено в виде самоходной тележки, перемещающейся при помощи ведущих колес 4 по рельсам 5, уста новленным перпендикулярно основным горизонтальным направляющим 2, на уровне которых на раме 6 тележки смонтированы дополнительные горизон- тальньш направляющие 7, стыкующиеся с основными горизонтальными направляющими 2. Здесь же на противоположной основным вертикальным направляющим 3 стороне смонтированы дополнительные вертикальные направляющие 8. Они установлень относительно дополнительных горизонтальных направляющих 7 со смещением по горизонтали на расстояние, равное щирине колеи направляющих, что позволяет выставить дополнительные вертикальные направляющие 8 напротив вертикальных нап0
0
5
0
5
5
0
5
равляющих 3 при выходе грузонесущих платформ 1 на вышерасположенный зтаж. Причем для .выполнения данной операции дополнительные вертикальные направляющие 8 имеют длину большую, чем вертикальный зазор в основных вертикальных направляющих 3. Это позволяет замкнуть разрыв в вертикальной, трассе движения.
Дополнительные горизонтальные направляющие 7 и основные горизонтальные направляющие 2 первого зтажа оборудованы расположенныг-да под основными вертикальными направляющими 3 поворотными упорами 9 для ведущих колес. Для повышения тягово-сцепной способности грузонесущей платформы
1на участке перехода от горизонтальной трассы к вертикальной по концам основных горизонтальных направляющих
2первого этажа и между дополнительными горизонтальными направляющими 7 смонтирована зубчатая рейка 10, с которой сцепляется приводная шестерня 11, установленная на механизме передвижения. Для плавного зацепления шестерни 11 с рейкой 10 последняя смонтирована с возможностью гори-- зонтального перемещения и.выполнена со скосом зубьев по высоте на заходе, а для обеспечения точного позиционирования зубчато-реечное зацепление
10 и 11 выполнено мелкомодульным. Механизм передвижения выполнен в виде двух пар попарно расположенных, шарнирно прикрепленных к платформе 1 и щарнирно перекрещивающихся рычагов. Одна пара рычагов 12 имеет прямолинейную форму и на ее свободных концах С монтированы свободно ходовые колеса 13, опирающиеся на горизонтальные 2 и 7 и основные вертикальные 3 направляющие, а другая пара рычагов 14 имеет криволинейную форму с отогнутыми в противоположных направлениях концами, на которых установлены ведущие колеса 15 и 16, охватывающие вертикальные направляющие
3и 8. Рычаги 14 с колесами 15 и 16 образуют два захвата: верхний и нижний. С целью обеспечения движения платформ 1 по вертикали с возможностью выхода на этажи при наличии разрыва трассы по основным вертикальным направляющим захваты разнесены по высоте и длине платформы. При движении по горизонтали самоходные платформы 1 опираются на ходовые
31
колеса 13 и одну из пар ведущих коле с 1 6 . .
Подъемно-транспортная система работает следующим образом.
Горизонтальное движение самоходных платформ 1 обеспечивают за счет
силы тяги ведущих колес 16, опирающихся на горизонтальные направляющие 2 и 7. При этом шарнирно-рычажная система механизма передвижения сжата по высоте. После подхода платфор.мы 1 к направляющим 3 и прижатия ходовых колес 13 к упорам 9 осуществляют сжатие шарнирно-рычажной системы в продольном направлении под действием силы тяги одной пары колес 16, продолжающих в этот период движение вперед. Этим обеспечивают поднятие колес 15 и введение их в захват с направляющими 3. Предварительное прижатие колес 15 к направляющим 3 осуществляют за счет силы тяги ниж- них колес 16 при горизонтальном их движении. После захвата колес 15 за направляющие 3 и отрыва нижних колес 16 от горизонтальных направляющих 2 прижатие верхних колес 15. обеспечивают за счет силы гравитации, действующей со стороны платформы 1 и нижних ведущих колес 16 на верхние плечи криволинейных рычагов 14 шарнирно рычажной системы механизма передвижения. Создаваемый таким образом момент стремится опрокинуть колеса 15 против часовой стрелки относительно точек их опоры. Устойчивость платформы I при движении по направляющим 3 обеспечивают посредством опирания ее на ведущие колеса 15 и ходовые колеса 13. Шарнирная подвижность ходовых колес 13 не препятствует реализации прижимного усилия в зонах контакта охватывающих направлянхцие 3 колес 15 При подходе платформы I к вьщтераспо- ложенному этажу тележку устройства перевода ставят в положение, при котором на пути движения платформы 1
.находятся направляющие 8, перекрывающие разрыв в направляющих 3 в зоне выхода на этаж. При подходе к разрыву в трассе основных вертикальных направляющих 3 подключаются нижние ведущие колеса 16. Они вначале взаимодействуют с дополнительными вертикальными направляющими 8 без прижимного усилия и силы тяги, так как при наличии основных вертикальных направляющих 3 платформа I опирается на
2464
них через верхние ведущие колеса 15. Но как только нижние ведущие колеса 16 теряют контакт с направляюишми 3 момент от действия силы гравитации
прижимает колеса 16 к направляющим 8. В дальнейшем колеса 16 осуществляют функции движения в пределах всей длины направляющих 8, т.е. в пределах
,| зазора между направляющими 3. В верхней части данного участка начинают 4эаботать верхние колеса 15. В таком положении платформа 1 может продолжать вертикальное движение, минуя
g достигнутый этаж. При необходимости выхода на нужном этаже платформу останавливают в положении, при котором она с помощью колес 15 удерживается на основных вертикальных направляющих 3, а колеса 16 при этом выведены из зацепления с направляющими 8. Тележку устройства перевода устанавливают в положение, при котором смонтированные на ней направляющие 7
5 стыкуются с направляющими 2 этажа. После этого платформу 1 опускают и устанавливают на дополнительные горизонтальные направляющие 7 тележки устройства перевода. В такой позиции
0 платформа 1 подготовлена для движения по горизонтальной трассе этажп. При необходимости опускания на ш-ж- ний этаж после движения по верхнему этажу платформу 1 приподнимают над установленной в конце поэтажной трассы тележкой устройства перевода, передвижением тележки убирают с пути платформы направляющие 7, преодолевают зазор в направляющих 3 аналогич- но тому, что делалось при подъеме, и осуществляют движение платформы I вниз. При установке платформы 1 на тележку устройства перевода левого крыла поэтажной трассы с пути ее дви5 жения вначале убирают, а затем, Лос- ле. установки -платформы 1 на тележку, устанавливают упоры 9, смонтирован- ные с возможностью поворота на 90. Компенсация износа ведущих колес 15
0 и 16 и вертикальных направлякяцих 3 и 8 осуществляется автоматически под действием внешней нагрузки путем изменения угла наклона рычагов 12 и 14 шарнирно-рычажной системы меха5 низма передвижения. Удерживание платформы 1 на вертикальных направляющих 3 и 8 при азартном или запланированном отключении тяговых приводов осуществляется за счет самоторможения
редукторов, а также средствами торможения. Точность позиционирования самоходных платформ 1 под основными вертикальными направляющими 3 обеспечивают за счет связывающего платформ 1 с горизонтальными направляющими 2 модульного зубчато-реечного зацепле- 1ния 10 и п.
Формула изобретения
1. Подъемно-транспортная система, iсодержащая самоходную грузонесущую I платформу с механизмом передвижения, :включающим в себй два шарнирно-рычаж ; ных захвата, выполненную с возмоткно- стью перемещения по основным поэтаж- но расположенным горизонтальным направляющим и основным вертикальным :направляющим, расположенным по концам основных горизонтальных направ- лякяцих с вертикальным и горизонтальным зазором, при этом в последнем смонтировано устройство перевода платформы с горизонтальной трассы на вертикальную и наоборот с дополнительными горизонтальными направляющими, стыкующимися с основными горизонтальными направляющими, и дополнительные вертикальные направлякяцие, расположенные на участке перехода от основных горизонтальных к основным вертикальным направляющим, о т л и- чающая ся тем, чтр, с целью повышения.надежности в работе, захваты разнесены по высоте и по длине самоходной грузонесущей платформы, - причем на переднем захвате верхнего расположения установлены ведущие колеса, охватывающие основные верти- ,кальные направляющие, а на заднем захвате нижнего расположения установлены ведущие колеса, охватывающие дополнительные вертикальные направляющие, смонтированные на противоположной основным вертикальным направляющим стороне устройства перевода с возможностью перекрытия вертикального зазора, при этом дополнительные горизонтальные направляющие первого этажа и основные горизонтальные направляющие первого этажа снабжены.расположенными под основными вертикальными направляющими поворотными упорами для ведущих колес,
2. Система по п.1, о т л и ч а ю- щ а я с я тем, что механизм передвижения содержит две пары попарно расположенных, шарнирно присоединенньрс к самоходной грузонесущей платформе
и шарнирно перекрещивающихся рычагов, одна пара которых имеет прямолинейную форму и на свободных ее концах смонтированы свободно ходовые колеса, опирающиеся на горизонтальные и основные вертикальные направляющие, а другая пара рычагов имеет ломаную форму с отогнутыми в противоположных направлениях концами, на верхнем из которых установлены попарно кинематически связанные, выполненные с возможностью встречного вращения верхние колеса, охватывающие основные вертикальные направляющие, а на нижнем - приводная шестерня и нижние ведущие колеса, охватывающие вертикаль- . ные направляющие и опирающиеся на горизонтальные направляющи.
3.Система поп.1,отличаю- Щ а я с я тем, что устройство перевода самоходной грузонесущей платформы содержит самоходную колесно-рель- совую тележку, занимающую одно из двух фиксированных: положений, причем в одном из них совмещаются основные
и дополнительные горизонтальЩ)1е направляющие, а в другом - дополнительные вертикальные направляющие, выполненные с возможностью размещения на- . против основных вертикальных направ- лякщих.
4.Система поп.1, отличающаяся тем, что на участках перехода от горизонтальной трассы к вертикальной между основными горизонтальными направляющими первого этажа и дополнительными горизонтальными направляющими -смонтирована зубчатая рейка, с которой зацеплена приводная
шестерня механизма передвижения, причем рейка выполнена со скосом зубьев на заходе и смонтирована с возможностью горизонтального перемещения.
CSJ
«о :з
В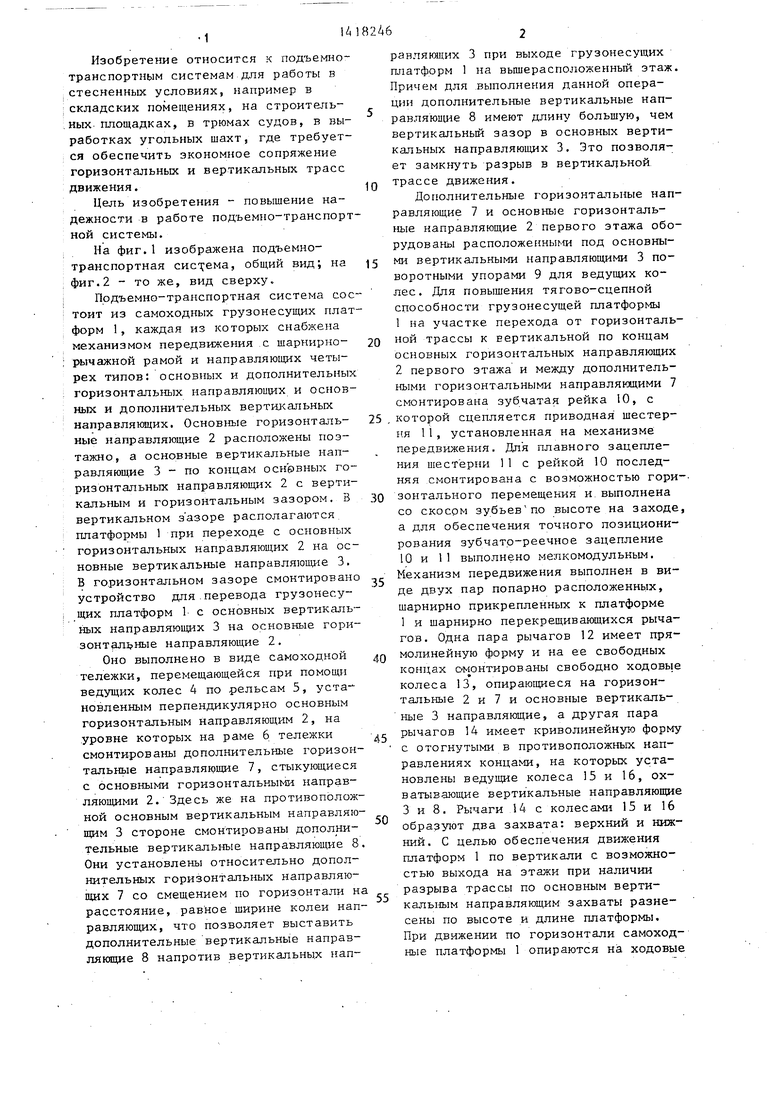


| название | год | авторы | номер документа |
|---|---|---|---|
| Подъемно-транспортная система | 1978 |
|
SU775034A1 |
| Подъемно-транспортная система | 1988 |
|
SU1562275A1 |
| Подъемно-транспортная система | 1987 |
|
SU1446079A1 |
| Подъемно-транспортная установка | 1976 |
|
SU612885A1 |
| ТРАНСПОРТНАЯ СИСТЕМА | 2002 |
|
RU2226473C2 |
| Опора подъемного крана | 1987 |
|
SU1565805A1 |
| Вертикально-замкнутый тележечный конвейер | 1981 |
|
SU982992A1 |
| Перегрузочное устройство | 1987 |
|
SU1602833A1 |
| ПОТОЧНАЯ ЛИНИЯ ДЛЯ СБОРКИ ЗВЕНЬЕВ РЕЛЬСОШПАЛЬНОЙ РЕШЕТКИ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 2008 |
|
RU2373320C1 |
| МНОГОЯРУСНАЯ АВТОМАТИЗИРОВАННАЯ АВТОСТОЯНКА МОДУЛЬНОГО ТИПА | 2008 |
|
RU2376430C1 |

Изобретение относится к подъемно-транспортным системам, предназначенным дпя работы в стесненных условиях. Цель изобретения - повышение надежности в работе. Система содержит грузонесупще платформы 1, смонтиifuiJ рованные на направляющих, и устройство для перевода платформ 1 с вертикальных на горизонтальные направляющие, выполненное в виде самоходной тележки с колесами. Одни из направляющих снабжены упорами для ведущих колес тележки. На горизонтальных направляющих первого этажа смонтирована зубчатая рейка 10, с которой сцепляется приводная шестерня 1i. Механизмы захвата обеспечивают устойчивость механизма передвижения и грузо- несущей платформы I в целом на участ- .ке перехода от горизонтальной трассы к вертикальной и наоборот. Система осуществляет оперативное обслуживание многозтажной зоны путем применения нескольких грузонесущих платформ. 3 3.п. ф-лы. 2 ил. ; ( (Л 00 tsD 42) О5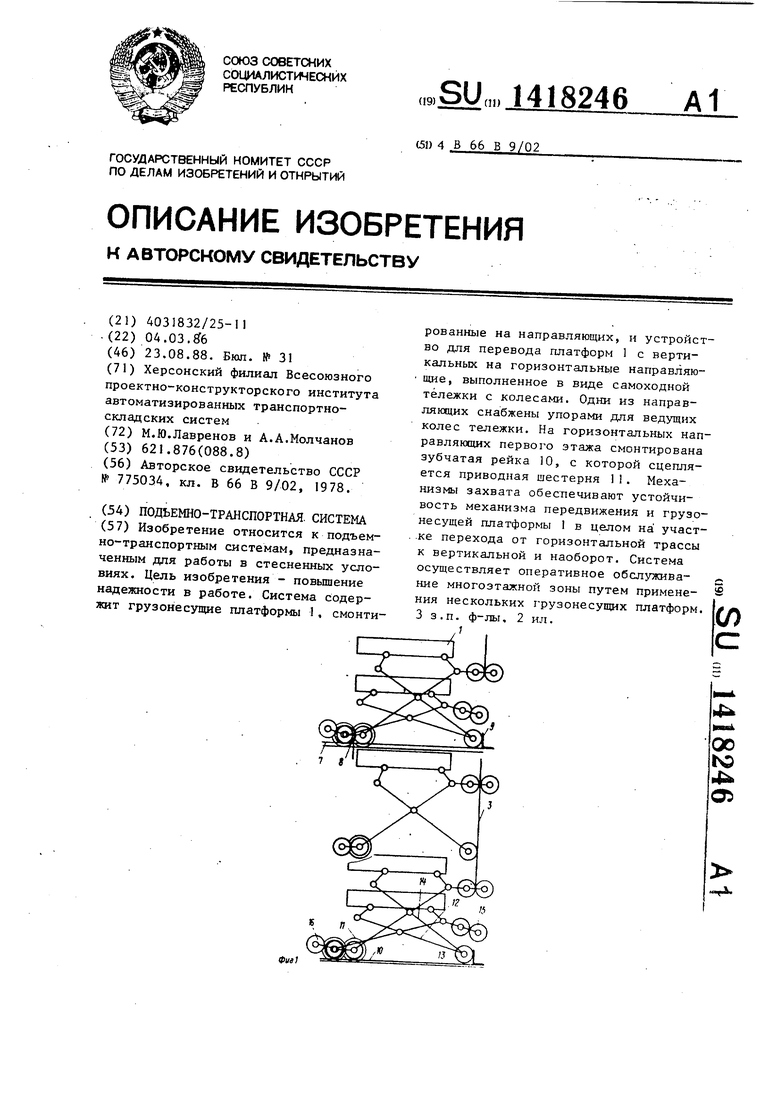
| Подъемно-транспортная система | 1978 |
|
SU775034A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
