изобретение относится к контрольно-измерительной технике и может быть использовано для горизонтирования объектов в различных отраслях техни.ки.
i Известна штативная головка, предназначенная для горизонтирования съемочного аппарата, которая состоит нз основания, корпуса, втулки с диамет ральной канавкой, кольца, уровня н фкксирукщих деталей 1.
Недостатком такого устройства явЧ ляется то, что оси вращения кольца и втулки не пересекаются, а скрещивают-, ся. Поэтому в устройстве отсутствуем точка, в. которой не изменялась бы высота от подвижной площадки до неподвижного основания. Расположение осей вращения исключает использование центральной части устройства для прохода кабельных и других связей, а также установку приборов большого веса, так как в этом случае.конструкция ус тройства будет громоздкой и массивной.
Наиболее близкюл по. технической сущности к предлагаемому является устройство горизонтирования, состоя-щее. из неподвижного основания, трех опор, подвижной платформы и уровня. В этом устройстве горизонтирование
осуществляется вращением пары приводов в противоположные стороны, пока ось,-проходящая через эти винты, не займет горизонтального положения 2. Недостатком зтого устройства является то, что нет ни одной точки подвижной платформы, которая в процессе горизонтирования сохранила бы неизменную высоту относительно неподвижного
10 основания.
Цель изобретения - сохранение в процессе горизонтирования неизменной высоты горизонтируемой платформы в ts заранее заданной неподвижной точке, расположенной вне опор.
Указанная цель достигается тем, что в устройстве горизонтирования, содержшцем неподвижное основание, под20вижную платформу, три регулируемые опоры, две из которых снабжены приводньми устройствами, и датчик горизонта, введен дифференциал, причем приводные устройства содер кат фиксаторы
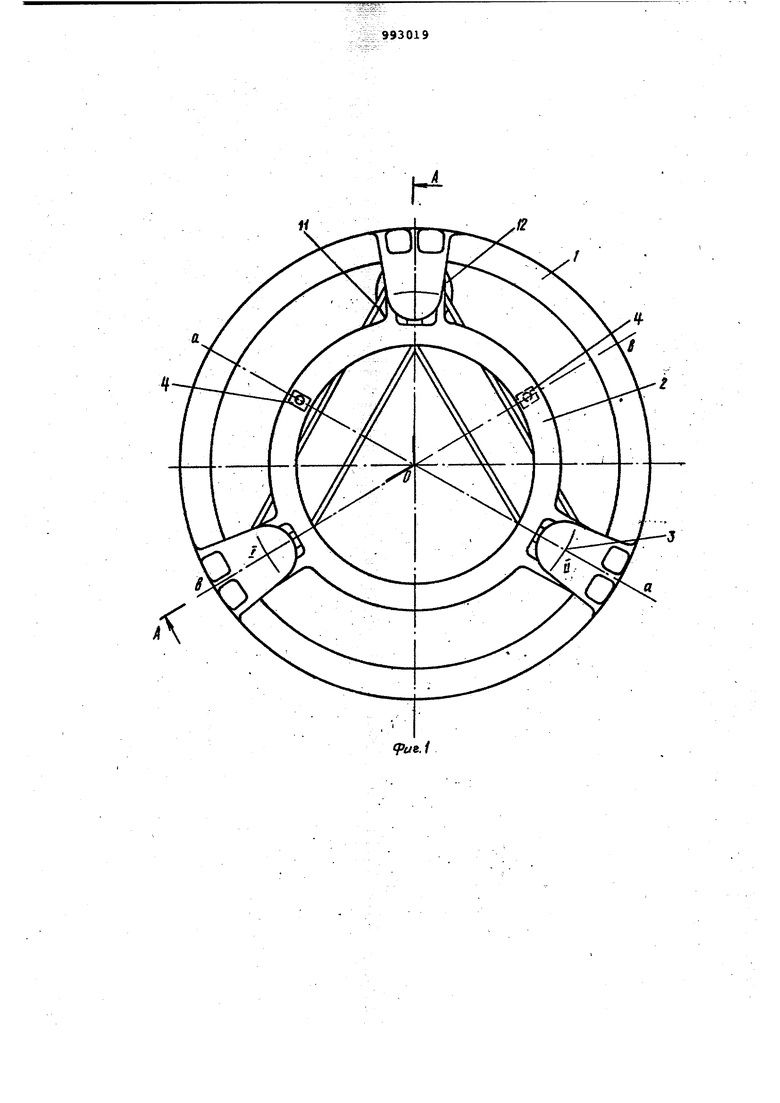
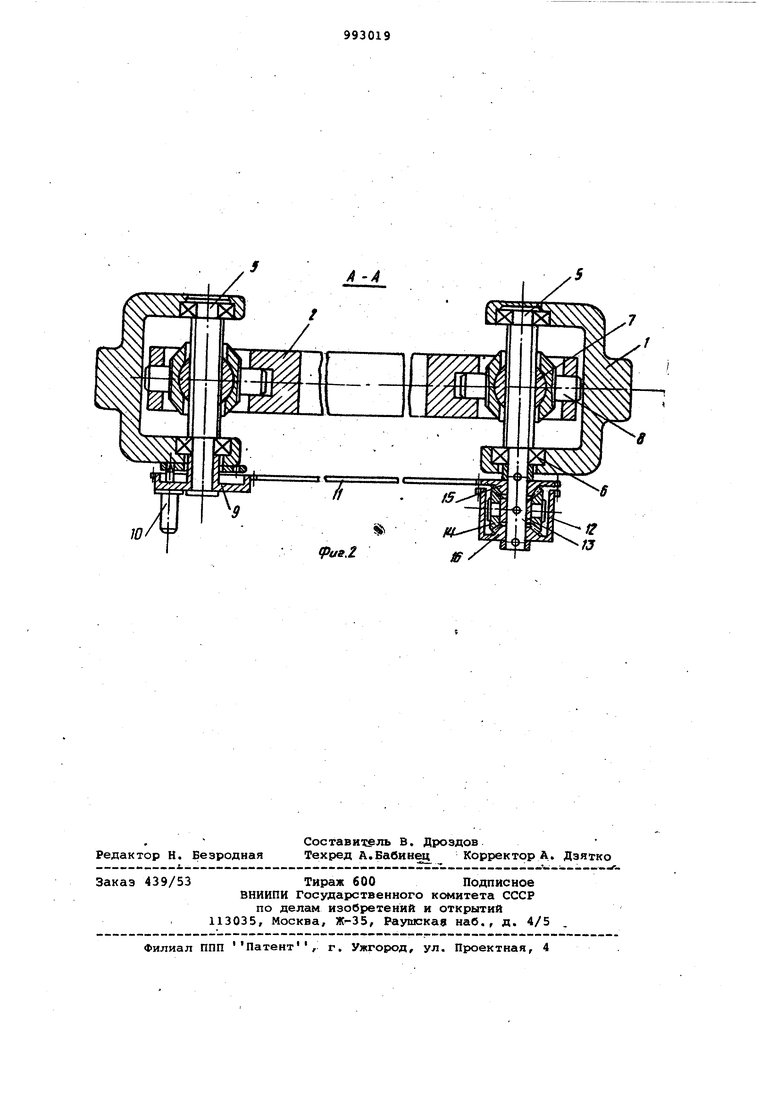
25 и кинематически соединены с солнечными колесами дифференциала, причем опоры выполнены винтовьми, резьба винта опоры, связанной кинематически с крестовиной дифференциала, противополож30 ,на резьбе винтов остальных опор. На фиг. 1 представлено горизонтирующее устройство, общий вид на фиг 2 - сечение А-А на фиг. 1. Горизонтирующее устройство имеет неподвижное основание 1, подвижную платформу 2, три винтовые опоры 3, Н подвижной платформе 2 расположен дат чик горизонта 4, имеющий два места установки в зависимости от того, какая ось (а-а или в-в) горизонтируетс в данный момент. Каждая винтовая опора 3 состоит из винта 5 (фиг. 2), свободно вращающегося в подшипниках 6, закрепленных в основании 1, гайки 7, свободно поворачивающейсяв крестовине 8, которая в свою очередь свободно поворачивается в платформе 2, Винты 5 первой и второй опор 3 снабжены приводными устройствами в виде маховичков 9 с фиксаторами 10. Маховички 9 имеют зубья для передачи вращения цепной передачей 11 на дифференциал 12, который расположен на третьей винтовой опоре 3. Дифференциал 12 состоит из кресто вины 13, закрепленной на винте 5, на которой свободно вращаются солнечные колеса 14, связанные с солнечными ко лесами 15 и 16. Солнечные колеса 15 и 16 имеют зубья цепной передачи 11, В предлагаемом устройстве винтовые опоры 3 (фиг. 1) расположены в вершинах равностороннего треугольника, а передаточные отношения цепнЕЛх передач 11 и дифференциала 12 подобраны так, что при вращении винта 5 (фиг. 2) пер вой опоры 3 (при застопоренной фиксатором 10 второй винтовой опоре 3) вин 5 третьей опоры 3 поворачивается на такой же угол в том же направлении. Если шаг винтов 5 всех опор 3 одинаков, а винт 5 третьей опоры 3 имеет направление, противоположное направлению винтов 5 первой и второй опор 3 то гайка 7 третьей опоры 3 переместит ся на такое же расстояние, как гайка 7 первой опоры 3, но в противоположном направлении. Горизонтируемая плат форма 2.повернется вокруг оси а-а. Установив датчик горизонта 4 по оси S-B, добиваются горизонтального положения ОСИ в-в. Затем, расположив датчик горизонта 4 по оси а-а. и зафиксировав первую Otxjpy 3 фиксатором 10, вращая маховичок 9 второй опоры 3, выводят роризонт по оси а-а. Так как на плоскости осей а-а и в-в имеются две горизонтальные линии, то можно сказать, что вся плоскость расположена горизонтально. Точка пересечения осей а-а и в-в (точка 0) в процессе горизонтирования не мейяет своего положения, т.е. неподвижна. Устройство горизонтирования является универсальным, так как изменением передаточного отношения механических передач между опорами достигается выбор требуемой точки пересечения осей горизонтированкя, высота которой в процессе горизонтирования остается, неизменной. Таким образом, по сравнению с устройствой-прототипом использование двух винтовых опор с приводными устройствами, соединенных с дифференциалом на третьей винтовой опоре,в предлагаемом устройстве обеспечивается сохранение неизменной высоты заданной точки платформы при горизонтировании. Через эту точку проходят связующие элементы постоянной длины (трубы, кабели и т.п.), необходимые для функционирования- изделия. Формула изобретения Устройство горизонтирования трехопорной платформы, содержащее неподвижное основание, подвижную платформу, три регулируемые опоры, две из которых снабжены приводными устройствами, датчик горизонта, отличающееся тем, что, с целью сохранения неизменной высоты заданной точки платформы в процессе горизонтирования, в него введен дифференциал, а приводные устройства содержат фик- саторы и кинематически соединены с солнечными колесами дифференциала, причем опоры выполнены винтовыми, резьба винта опоры, связанной кинематически с крестовиной дифференциала, противоположна резьбе винтов остальных опор. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР № 315865, кл. F 16 М 11/14, 02.11.70. 2.Авторское свидетельство СССР . по заявке 3240638/18-10, кл. G 01 С 9/12, 28.01.81 (прототип).
e
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ горизонтирования трехопорной платформы | 1980 |
|
SU911158A1 |
| ПОДЪЕМНО-МАЧТОВОЕ УСТРОЙСТВО МОБИЛЬНОЙ АНТЕННОЙ УСТАНОВКИ | 2008 |
|
RU2373618C1 |
| УСТРОЙСТВО ГОРИЗОНТИРОВАНИЯ | 2023 |
|
RU2806130C1 |
| МОБИЛЬНАЯ АНТЕННАЯ УСТАНОВКА | 2001 |
|
RU2200359C1 |
| МОСТ С ЦИЛИНДРИЧЕСКОЙ ГЛАВНОЙ ПЕРЕДАЧЕЙ В ХОДОВОЙ ЧАСТИ | 2023 |
|
RU2811589C1 |
| МОБИЛЬНОЕ ТОКАРНОЕ УСТРОЙСТВО ДЛЯ ОБРАБОТКИ ТОРЦОВ КРУПНОГАБАРИТНЫХ ОБЕЧАЕК | 2001 |
|
RU2200075C2 |
| УЗЕЛ ОРИЕНТИРОВАНИЯ И ГОРИЗОНТИРОВАНИЯ | 2021 |
|
RU2755574C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УКЛОНОВ ПРОФИЛЯ ПОВЕРХНОСТИ АЭРОДРОМНЫХ ПОКРЫТИЙ | 2015 |
|
RU2592930C1 |
| КОНУСНАЯ ДРОБИЛКА | 1999 |
|
RU2181626C2 |
| ВНУТРИРЕЗЬБОШЛИФОВАЛЬНЫЙ СТАНОК | 1992 |
|
RU2014974C1 |