(54) ПРИВОД ФРЕЗЕРНОГО СТАНКА
| название | год | авторы | номер документа |
|---|---|---|---|
| Токарный станок | 1983 |
|
SU1135557A1 |
| Копировально-фрезерный станок | 1977 |
|
SU680819A1 |
| ЭЛЕКТРОМЕХАНИЧЕСКАЯ ВИНТОВАЯ СИЛОВАЯ ГОЛОВКА | 1968 |
|
SU217890A1 |
| Зубофрезерный станок | 1977 |
|
SU659347A1 |
| Многошпиндельный токарный авто-MAT | 1979 |
|
SU852448A1 |
| Станок для фрезерования односторонних скосов на торцах зубьев шестерен | 1977 |
|
SU738791A1 |
| Способ зубозакругления колес и станок для его осуществления | 1987 |
|
SU1634404A1 |
| Привод станка | 1980 |
|
SU1096070A1 |
| СПОСОБ МЕХАНИЧЕСКОЙ ОБРАБОТКИ АСИММЕТРИЧНОЙ ЗАГОТОВКИ С ОДНОЙ УСТАНОВКИ, СТАНОК И УСТРОЙСТВО ДЛЯ ЗАКРЕПЛЕНИЯ ЗАГОТОВКИ | 2013 |
|
RU2600685C1 |
| Токарный станок | 1978 |
|
SU994118A2 |
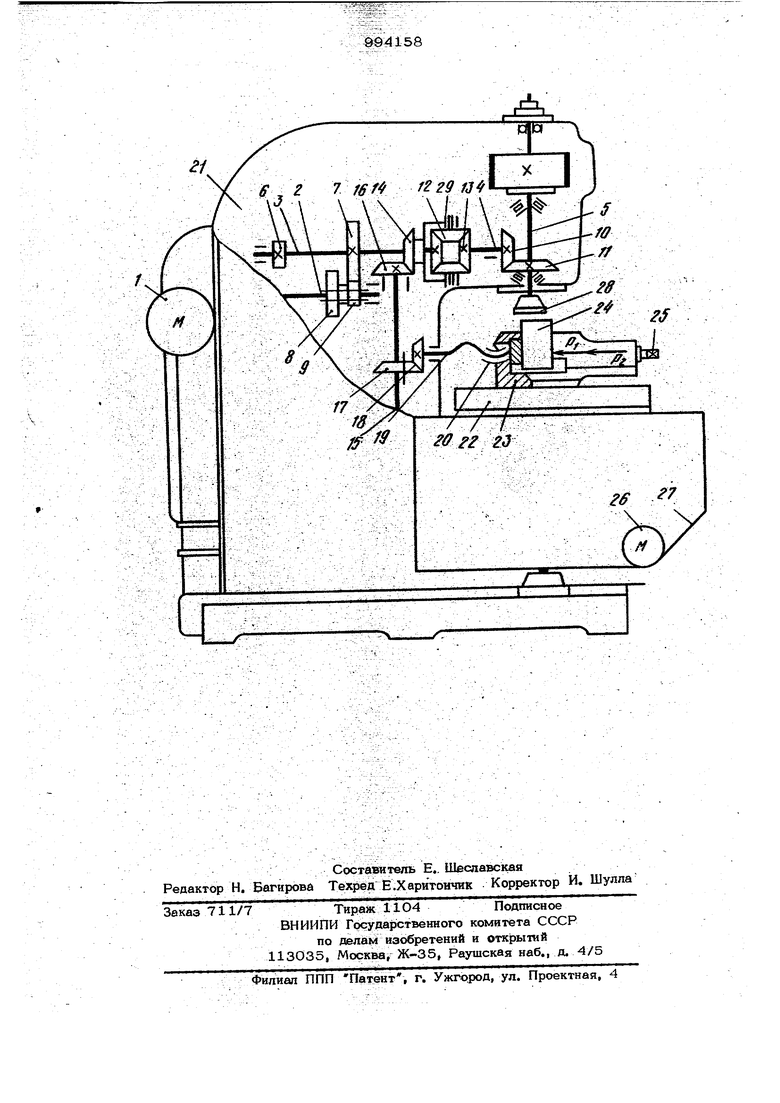
, . . Изобретение относится к области стан костроения. Известен привод фрезерного станка, содержащий кинематическую цепь главно го движения и подачи, с установленным в кинематической цепи главного движени дифференциалом, кинематически связанным с цепью подачи l . Известный привод не решает задач управления усилителем зажима детали в фу нкции технологической нагрузки, что веДет к снижению надёжности закрепления и точности обработки при использовании избыточной силы закрепления детали. Целью изобретенияявляется снижение деформаций детали и повышение точности обработки. Цель достигается тем, что в приводе фрезерного станка, содержащем кинемати ческие цепи движения формообразования с установленным в цепи главного движе ния дифференциалом и зажимное приспособпение, одно из звеньев дифференциале кинематически связано с механизме aa-f жима приспособления. Эта связь обеспечивает изменение усилия зажима в функции сил резания, что позволяет иметь оптимальное соотнсниениё силы резания и зажимного усилия. Поэтому, при выборе величины силы зажима можнообеспечить стабильный коэффициент запаса в любых условиях обработки и в том числе при максимальном возрастании сил резания, связанных с максимальным увеличением припуска и механических свойств обрабатываемого . материала. Схема привода станка изображена на чертеже. Привод станка содержит кинематическую цепь главного движения, включа1ошую двигатель 1, валы 2, 3 и 4, шпиндель 5, установленные на валах шестер.ни 6, 7, 8, 9, 10 и 11, конический дифференциал, включающий шестерни 12, 13 и 14, вад 15, шестерни 16, 17 и 18, вал 19, гайку 20. Кинематическая цепь главного движения расположена в корпусе 21 станка. На столе 22 станка закреплено зажимное приспособление 23 Обрабатываемая деталь 2 4 устанавливается на базовые элементы приспособле ния и закрепляется винтовым зажимом с помощью рукоятки, одеваемой на хвостовик 25„ Кинематическая цепь подачи имеет отдельный электродвигатель 26 и располагается в консоли 27 станка. Обработка детали ведется фрезой 28. Привод фрезерного станка работает следующим образом. Обрабатываемая деталь 24 устанавливается и закрепляется винтовым механизмом зажимного приспособления. При этом обеспемвается прижатие детали с силой Р:, которая должна обеспечить устойчивое положение детали в зажимном приспособлении. Затем включается привод стйнка, который в соответствии с настройкой станка обеспечиваем 28 и столу станка движения, рмообразования; фрезе вращательное движение столу - поступатещ ное движение нодачк Начинается процесс обработки. Вращение от электродвигателя 1 пере дается на вал 2, откуда через одну из передач 8-6 или 9-7 передаётся на вал 3. На валу 3 закреплена центральная шестерня дифференциала, которая через шестерни 13 водила 29 передает вращение валу 4. На валу 4 закреплена шестерня -10, которая предает вращение шестерне 11 , закрепленной на шпинде ле 5. Кинематическая цепь подачи имеет отдельный электродвигатель 26, от которого движение подачи получает стол 2 В процессе обработки увеличивается крутящий момент на фрезе и в кинемати ческой цени .главного движения. Одновременно увеличивается крутящий момент в кинематической связи дифференциального механизма с зажимным приспособлением Крутящий момент с водила 29 через шестерни 14-16, вал 15, шестерни 17-18 передается в несамотормозяшую винтовую пару 19-20, гайка 2О которой шпонкой соединена с корпусом зажимного приспособления 23. В результате образуется сИла Р, которая является функцией крутящего момента-нагрузки в цепи главного движения. Эта сила дополнительно зажимает установленную в приспособлении 23 деталь 24. Снижение нагрузки кинематической цепи главного движения вызывает уменьшение указанной силы. Таким образом, происходит автоматическое управление усилием зажима в . ункции сил резания, что позволяет ста- . билизировать соотношение силы резания и силы зажима. Это повьпиает надежность закрепления пря одновременном снижеиии усилия зажима. Такое управление усилием зажима ведет к повышению точности обработки. Привод станка может найти широкое применение в фрезерных станках, на которых обрабатываются детали невысокой жесткости. ФОрмула изобретения Привод фрезерного станка, содержащий кинематические цепи Движения формообразования, с установленным в цепи главн( движения дифференциалом и зажимное приспособление, отличающийся тем, что, с целью снижения деформации обрабатываемой детали и повышение точности обработки, одно.из звеньев дифференциала кинематически . связано с механизмом зажима приспособления. Источники информации, йринятые во внимание при экспертизе 1. Авторское свидетельство СССР Ms 674863, кл. В 23 С 9/ОО, 1979..
