(54) АДАПТИВНАЯ СИСТЕМА ДЛЯ ИДЕНТИФИКАЦИИ ОБЪЕКТА Изобретение относится к автоматике и может найти широкое применение в системах автоматического управления различными объектами с переменными параметрами., Наиболее близкой по технической сущности к предлагаемой является сис:тема, содержащая последовательно соединенные блок управления, релейный элемент, объект управления, чувствительные элементы, первый амплитудно-импульсный модулятор, сумматор и блок умножения и последовательно соединенные второй амплитудно-импульсный Модулятор, модель объекта управлеНИН и модель чувствительных элементов, выходы которой соединены с соответствующими вторыми входами сумматора, вторые входы модели объекта управ ления соединены с соответствующими выходами блока настройки, а выходы ре лейного элемента соединены с соответствующими входами второго амплитудно-импульсного модулятора, выходы О торого соединены с соответствующими вторыми входами блока умножения 1. Недостатком известного адаптивного устройства для идентификации Объекта управления является невысокое быстродействие.
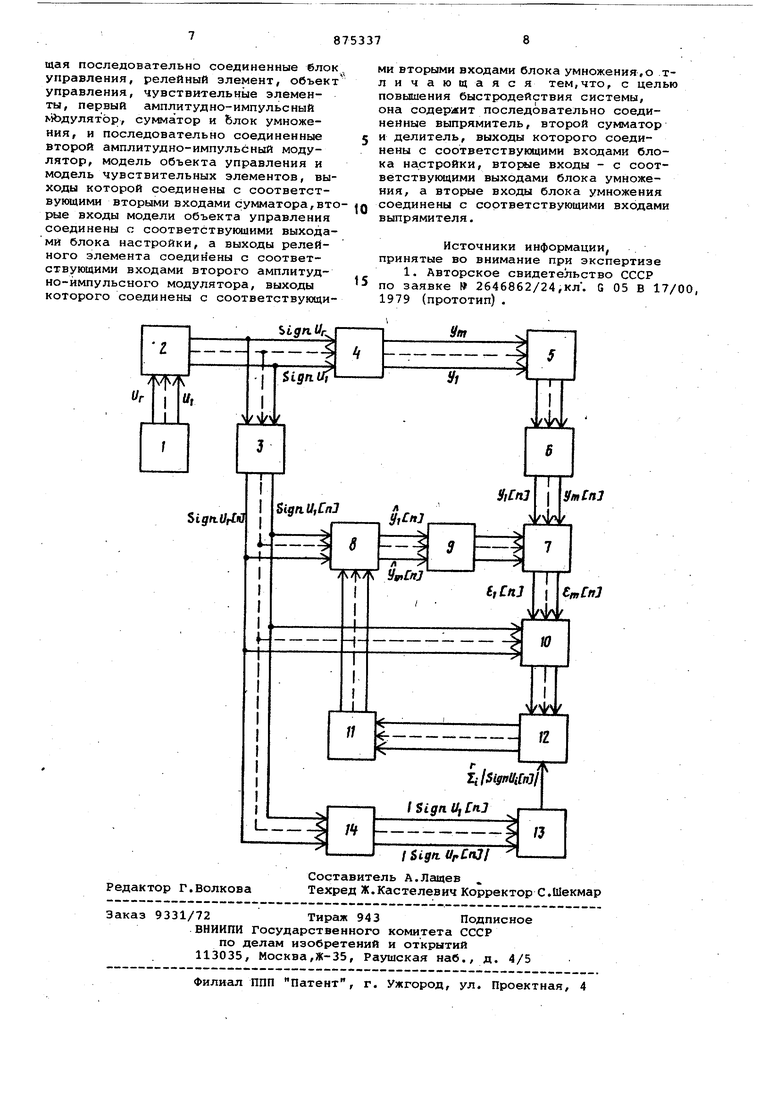
УПРАВЛЕНИЯ Цель изобретения - повышение быстродействия системы за счет ускорения процесса идентификации. Эта цель достигается тем, что адаптивная система для идентификации объекта управления содержит последовательно соединенные выпрямитель, второй сумматор и делитель, выходы которого соединены с соответ ствующими входами блока настройки,вторые входы- с соответствующими выходами блока умножения, а вторые входы блока умножения соединены с соответствующими входами выпрямителя. На чертеже изображена блок-схема предлагаемой системы для идентификации объекта управления для варианта нестационарного объекта с числом управляющих воздействий, равном г и с m измеряемыми выходными координатами. Предлагаемая система содержит блок 1 управления, к которому подключены через релейный элемент 2 входы входного второго еилплйтудНО-импульсного модулятора 3 и объекта 4 управления к выходам которого через чувствительные элементы 5 и выходнои первый амплитудно-импульсный модулятор 6 подключены первые входы первого сумматора 7 сравнения, выходы входного амплитудно-импульсного модулятора 3 подключены к первым входам модели объекта 8 управления, выхс ды которой- через модель чувствительных элементов 9 подключены ко вт рым входам первого сумматора 7 срав нения. Система содержит блок 10 умножения, блок 11 настройки параметров модели объекта управления,а так же делитель 12, второй сумматор 13 и выпрямитель (блок двухполупериодных выпрямителей) 14. Блок 10 умножения .первыми входами подключен к выходам первого сумматора 7 сравнения, а вторыми - к выходам входно го амплитудно-импульсного модулятора 3. Выходы блока 11 настройки параметров модели подключены ко вторым входам модели объекта управлени а в.ходы - к выходам делителя 12, входы делимого котррого подключены к выходам блока 10 умножения, а вхо делителя - к выходу сумматора 14, входы которого подключены к выходам блока 14 двухполупериодных выпрямителей. Входы последнего соединены со входами блока 10 умножения, входами модели объекта 8 управления и выходами входного амплитудноимпульсного модулятора 3. . Система работает следующим образом. С выходов блока 1 управления управляющие воздействия V , V g ..% подаются на входы релейного элемента 2. Релейный элемент 2 представля ет собой безынерционное усилитель вое звено с нелинейной характеристи кой . О при Mi or SiQfn V. -1 при 0 при 1- -0 г где i 1,2,...с. На выходе релейног элемента 2 формируется со;вокупность воздействий ,... котора подается на входы входного амплитуд но-импульсного модулятора 3 и объек та 4 управления. Выходные сигналы объекта управления у , У(... у измеряют с помощью чувствительных эле ментов 5 и подают на входы выходного амплитудно-импульсного модёлятора б. Входной и выходной амплитудно импульсные модуляторы осуществляют дискретное преобразование аналоговых входных и выходных сигналов объ та 4 управления, в результате чего на их выходах получают последовател ности импульсов Siejn V t iSi iаМг 54 C vii-,rn,VjM,,..yjm3 В дискретные моменты времени п. Сигналы с выхода входного амплитудно-импульсн го модулятора подаются на входы мо дели объекта 8 управления, блока 10 умножения и блока 14 двухполупериод ных выпрямителей. На выходах модели бъекта 8 управления появляются скгналы 5,tti, ,,... СпЗ . кото- ые через модели чувствительных элеентов 9 подаются на входы сумматора 7 сравнения. Сумматор сравнения осуествляет сравнение откликов объекта и модели, в результате чего на его выходах появляется совокупность сигналов о рассогласовании между моделью и объектом видаС И.аЕ,€тГпЗ. Ошибки рассогласования подаются на входы блока 10 умножения, на другие входы которого подается информация о входных воздействиях. Б результате операции умножения на выходе блока умножения мы получаем совокупность векторов вида «iMeiqfflVW,t Siqf« YCn,CmMsiCf Y, siojn MWK5icfnV,M,9i nVirhL....si4f Таким образом, на каждой итерации блок 10 умножения рассчитывает т.ч произведений. Рассчитанные произведения подаются на входы делимого делителя 12. Совокупность сигналов ЗЦп Mtn stsiflfn V,n , ,SAijttV r подается на входы блока 14 выпрямителей, образованного г двухполупериодными выпрямителями. В результате операции выпрямления импульсов на выходе блока выпрямителей появляется совокупность положительных сигналов вида , l5iQ;r V,j,,31, 4 Vdt I Эти импульсы подаются на входы сумматора 13, где складываются, в результате чего на выходе сумматора 13 получаем сигнал . 5iof 1 V,.rn3l 5lqfn V rnjetcfn VUn, а) Этот сигнал подается на вход делителя 12, который вырабатывает сигнал коррекции коэффициентов модели объекта 8 управления внда e i:n s yiVrn3f лМ яд;п УГп бЦп 9 OfnV tnl84 W gwtni s qg Vrro )nvtV1 с помощью блока настройки параметров модели 11 осуществляется подстройка коэффициентов модели объекта управления пропорционально .сигналам, поступающим с выхода делителя 12. Структура адаптивной системы для идентификации объекта управления такова, что на каждом шаге обеспечивается наибольшая скорость уменьшения ошибки рассогласования. В качестве примера рассматривгиот нестационарный.динамический объект с г входами и одним выходом.Чувствительный элемент принимают в виде пропорционального звена с коэффици-J ентом передачи, равным 1. Широкий класс динамических объектов может быть описан дискретным уравнением вида , О) где неизвестные коэффициенты объекта управления, подлежащие определению. Уравнение модели объекта управл ния может быть задано в виде .., (4J гдео( оценки параметров объек управления, вычисленные на (п-1)-м шаге идентификации . Меру качества индентификации мож но охарактеризовать критерием близо ти координат модели объекта управле ния и объекта управления , (5) представляющим собой сумму модулей ошибок рассогласования выходных коо динат модели объекта управления и объекта управления. Достоинством критерия (5)является его некритично к виду функции распределения помех При минимизации по методу градиента критерия I , получают законы
.ц,.. nvV a cgnVM)()-iV - VMs4iiV()3 (sic5M- rn StqfnVW)(V nlsit3fnVW) т.е. скорость процесс идентификации, реализуемого предлагаемой системой, всегда выше скорости процесс идентификации, реализуемого известн Таким образом, предлагаемая адаптивная система для идентификации объ екта управления обеспечивает noBbJ(ue ние скорости процесса идентификации, т.е. повышается быстродействие системы в целом. Достоинством предлагаемой системы для идентификации объекта управления является простота технической реализации, т.е. ее можно реализовать в виде набора аналогичных блоков. Вы полненных на современных унифицированных цифровых элементах. Систеи а может найти широкое применение в сис темах управления технологическими процессами с идентификатором в конту ре управления. Особенно эффективно использование предлагаел|ого устройства в системахоптимального управления, когда управляющие воздействия носят релейный характер..В этом случае нет необходимости в разделении |во времени процессов управления и .идентификации, идентификация будет изменения коэффициентов модели объекта управления в виде a..,cri(,-M)5ic5nViW (6) Выбор коэффициента пропорциональности и типа входного воздействия определяют скорость сходимости процесса идентификации. Нетрудно, видеть, что предлагаемая адаптивная система для идентификации объекта управления реализует алгоритм настройки коэффициентов модели объекта.управления вида «M li |l - « 4являющийся модификацией алгоритма(б). Если для характеристики скорости сходимости процесса идентификации, реализуемого предлагаемой адаптивной системой, использовать монотонную функцию,.не сложно получить, что сходимость процесса индентификации характеризуется величиной УМ. 70 Cs-tqfo VTn3Si(tnVrn) обеспечивается монотонное убывание ошибки определения параметров объекта. Для сравнения процессов идентификации, реализуемых с помощью известной и предлагаемой систем, определим величину a ГttЗ fnЗ-vГ (9) Эта величина составляет осуществляться одновременно с процесСОМ управления. Некритичность к закону распределения помех, высокая помехоустойчивость и повышенное быстродействие расширяют функциональные возможности предлагаемой системы и позволяют ее использовать при управлении быстропротекающими стохастическими технологическими процессами. Применение предлагаемой системы позволяет оперативно получать достоверную информацию об Объекте управления, что ведет к повышению качества процесса управления объектом, а ;это, в свою очередь, обеспечивает Iпоявление положительного экономического эффекта. Использование предлагаемой адаптивной системы только в производстве кальцинированной соды позволяет за счет уменьшения расхода очищенного рассола, расхода извести, расхода пара и ряда других реагентов снизить себестоимость кальцинированной соды. Формула изобретения Адаптивная система для идентификации объекта управления,, содержа
| название | год | авторы | номер документа |
|---|---|---|---|
| Адаптивная система управления | 1980 |
|
SU980070A1 |
| Адаптивный идентификатор | 1984 |
|
SU1136115A1 |
| Адаптивное устройство для идентификацииОб'ЕКТА упРАВлЕНия | 1978 |
|
SU798701A1 |
| Адаптивная система управления | 1982 |
|
SU1071996A1 |
| Адаптивная система управления | 1983 |
|
SU1136110A1 |
| Идентификатор параметров двумерного объекта | 1981 |
|
SU995065A1 |
| СИСТЕМА УПРАВЛЕНИЯ С ПЕРЕМЕННОЙ СТРУКТУРОЙ | 1992 |
|
RU2034695C1 |
| Устройство для адаптивной идентификации объекта | 1983 |
|
SU1177794A1 |
| Устройство для адаптивной идентификации объекта | 1985 |
|
SU1305633A2 |
| Адаптивный экстраполятор | 1982 |
|
SU1042031A1 |
