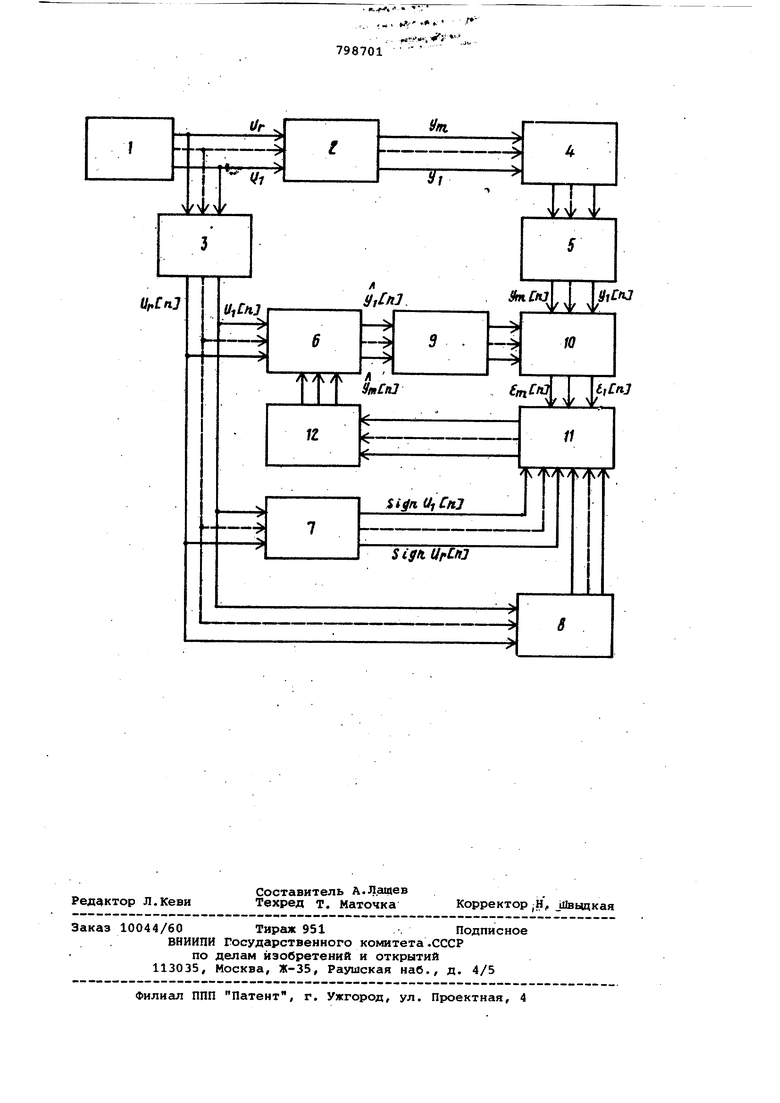
(54) АДАПТИВНОЕ УСТРОЙСТВО ДЛЯ ИДЕНТИФИКАЦИИ ОБЪЕКТА УПРАВЛЕНИЯ чувствительных элементов 9 подключены к первым входам сумматора 1О, выходы которого подключены к первым входам блока 11 умножения. Выходы блока 11 умножения через блок 12 настройки параметров модели объекта управления подключены к вторым входс1М модели объекта управления.Выходы блока 8 набора масштабных коэффициен :тов усиления управлений подключены к вторым входам релейного элемента 7 Устройство работ&ет следукмцим образом. С выходов блока 1 управления упра ляющие воздействия V , V,, . . . , V подаются на входы объекта 2 управления и входного амплитудно-импульсног модулятора 3. Выходные сигналы объек та управления у , у, , , . , у измеряют с помощью чувствительных элементов 4 и подают на входы выходного амплитудно-импульсного модулятора 5. Вход ной и выходной амплитудно-импульсные модуляторы осуществляют дискретное преобразование аналоговых входных и выходных сигналов объекта 2 управления, в результате чего на их выходах получают последовательности ам литуднй-моделированных импульсов .ViCn ,... у fnl 7 , ,.., в дискретные моменты времени п. С выходов, входного амплитудно-импульсного модулятора 3 последовательность импульсов V fnj Vifn , ,,. Vj, n поступает на первые входы модели объекта управления, входы релейного элемента 7 и блока 8 набора масштабных коэффициентов усиления управлений. Выходные сигналы модели 6 объекта управления у n УС. п . через модели чув ствительных элементов 9 подают на пе вые входы cy « aтopa 10, на вторые входы которого подается последовательность импульсов у п , yjChJ .... Г выходов амплитудно-импульс ного модулятора 5. Сумматор 10 вычис ляет рассогласование выходных коорди нат объекта 2 управления и модели 6 объекта управления f-i fn , f j Г . . подает их на первые входы блока 11 умножения. На вторые входы блока 11 умножения подается сигнал с выходов блока 8 набора масштабных 1 оэффициентов усиления управлений, а на третьи входы - с выходов релейifbro элемента 7, представляющего собой безынерционное усилительное звено с нелинейной характеристикой Г О при 5i(j« Vi yl при n cf (1) n -cf -1 при где i - 1,2,..., П .Ha выходе релейного элемента 7 формируется последовательность импульсов V n , Wj n , . . . , eiq-M Vf nl . Сигнал, пропорциональный ошибкам определения параметров объекта управления, с выходов блока 11 умножения подается на входы блока 12 настройки параметров модели объекта управления, который осуществляет подстройку коэффициентов модели 6 объекта управления по ее вторым входам.Параметры модели 6 объекта управления на каждом iqare идентификах и координируются сигналом, пропорциональным ошибке рассогласования выходных координат объекта 2 управления и модели б объекта управления 2 . ы который вычисляется сумматором 10 сравнения. Структура адаптивного устройства для идентификации объекта управления такова, что на каждом шаге обеспечивается наибольшая скорость уменьшения ошибки рассогласования за счет оптимального выбора коэффициента пропорциональности, который вычисляется в блоке умножения на основании информации, поступающей с выходов релейного элемента 7 и блока 8 набора масштабныхкоэффициентов усиления управлений. Вычисленный в блоке 11 умножения сигнаЛ коррекции параметров модели объекта управления подается на блок 12 настройки параметров модели объекта управления, который реализует коррекцию параметров модели 6 объекта управления. В качестве примера рассмотрим нестационарный динамический объект с г входами и одним выходом. Чувствительный элемент принимают в виде пропорционального звена с коэффициентом передачи, равным единице. Широкий класс динамических объектов описывается дискретным управлением вида у п S a;/V. п (2) где а - неизвестные коэффициенты объекта управления, подлежащие определению. Уравнение модели объекта управления згщается в виде п . (3) где а 1 оценки параметров объекта управления,вычисленные на (п-1)-м. шаге идентификации. Меру качества идентификсщии можно охарактеризовать критерием близости координат модели объекта управления и объекта управленияI 2|ен| (4) представляющим собой сумму модулей сх1Шбок рассогласования выходных координат модели объекта и объекта управления. Достоинством критерия (4) является его некритичность к виду функции распределения помех. При минимизации по методу градиента критерия 1 | , получают законы измерения коэффициентов модели объекта управления в виде а Г ail -i -Vnl i(., где я, коэффициенты пропорциональности. Нетрудно показать, что максимальную скорость идентификации обеспечивает выбор q fnj в виде .t4--v -- j- .(61 f ш Тогда Оптимальный закон настройки коэффициентов модели имеет вид , ,аДи-1(.Су,1 a W-Qiln-iUV - : -siQMV;th. .. .о,1У,а,С«-11 л ДИаЧ| . :где л - коэффициент, обеспечивающий монотонный характер процесса идентификации. Коэффициент Л лежит в пределах О 2 2 Закон настройки коэффициентов модели объекта управления (7) позволяет получить несмещенные оценки коэффици ентов а, независимо от характера де ствующих помех. В процессе идентификации объекта управления, описываемого уравнением (2), релейный элемент (7) вычисляет последовательност 5i(jii «г 1«. Sign ViCn, ... ,Si9 Vf W В блоке 8 набора масштабных коэффициентов усиления управ|Лений вычисляется скалярный коэффициент пропорцио нальности - а в сумматоре 10 сравнения - ошибка рассогласования .2a Cn-1lV i il. (8) Вычисленные величины подаются на бло 11 умножения, который вычисляет корректирующий сигнал для подстройки коэффициентов модели б объекта упра ления. Настройка коэффициентов модел объекта управления осуществляется блоком 12 настройки параметров моде ли объекта управления. Таким образом, предлагаемое адап тивное устройство для идентификации объекта управления обеспечивает повышение точности оценок параметров объекта управления, ускоряет процес идентификации и позволяет сгладить нежелательные выбросы при настройке коэффициентов модели. Достоинством предлагаемого устройства является простота технической реализации, его можно реализовать в .виде набора аналогичных блоков, выполненных на современных унифицированных цифровых элементах. Устройство может найти шивдкое применение в системах управления технологическшми процессс1ми с идентификатором в контуре управления. Некритичность к закону распределения помех, высокая помехоустойчивость и повышенное быстродействие расширяют функциональ:ные возможности предлагаемого устройства и позволяют его использовать при управлении быстропротекающими технологическими процессами. Применение предлагаемого устройства позволяет оперативно получить достоверную информацию об объекте управления, что ведет к повышению качества процесса управления объектом, а это, в свою очередь, обеспечивает появление положительного экономического эффекта. Форкула изобретения Адаптивное устройство для идентификации объекта управления, содержащее блок управления, выходы которого через объект управления соединены с входами чувствительного элемента и последовательно соединенные модель объекта управления, модель чувствительного элемента, сумматор и блок настройки, выхода которого соединены с первыми входами модели объекта управления, вторые входы которой через блок набора масштабных коэффициентов соединен со вторыми входами блока умножения, отличающееся тем, что, с целью повышения точности устройства, оно содержит релейный элемент и первый и второй амплитудно и 4пз л| сные модулятори причем ВЫХОДЫчувствительного элемент т.а через первый амплитудно-импульсный модулятор соединены со вторыми входаош сумматора, выхода блока управления через второй амплитудно-импульсный модулятор соединены со вторыми входами модели объекта управления, которые через релейный элемент подключены к третьим входам блока умножения. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР 429415, кл. G 05 В 17/02, 1975 (прот.отип) .
798701
. « .
, ., tff
... «.«-,
| название | год | авторы | номер документа |
|---|---|---|---|
| Адаптивная система для идентификации объекта управления | 1980 |
|
SU875337A1 |
| Адантивное устройство для идентификации объекта управления | 1987 |
|
SU1478190A1 |
| Идентификатор параметров двумерного объекта | 1981 |
|
SU995065A1 |
| Адаптивная система управления | 1980 |
|
SU980070A1 |
| Адаптивная система управления | 1982 |
|
SU1071996A1 |
| Адаптивный идентификатор | 1984 |
|
SU1136115A1 |
| СИСТЕМА УПРАВЛЕНИЯ С ПЕРЕМЕННОЙ СТРУКТУРОЙ | 1992 |
|
RU2034695C1 |
| Самонастраивающаяся система автоматического управления для объектов с запаздыванием | 1981 |
|
SU1173390A1 |
| Устройство для идентификациилиНЕйНОгО Об'ЕКТА | 1979 |
|
SU847276A1 |
| УСТРОЙСТВО ДЛЯ ИДЕНТИФИКАЦИИ ОБЪЕКТАУПРАВЛЕНИЯ | 1972 |
|
SU429415A1 |
«/Г
h+-r
V;
(/rfrtJ
tftf/tj
/r/r/v
и
--I-
У/У1
У;
M
,/л7
5
W
itCnJ
УлГл/ 1 Nl.
//
V wOs7v7V
SignllrM
