(54) МЕХАНИЗМ ДЛЯ ПЕРЕМЕЩЕНИЯ ГРУЗОВ
1
Изобретение относится к технологическому оборудованию для изготовления сборного железобетона на предприятиях строительной индустрии, в частности к механизмам для перемещения грузов.
По основному авт. св. N° 848436 известен механизм для перемещения грузов, . содержащий неподвижную раму, установленную на ней каретку с самоустанавливающимся упором и дополнительным упором с лыжей, склиз для контактирования с лыжей и привод возвратно-поступательного движения каретки, причем каретка выполнена с двусторонним упором, который, установлен с возможностью взаимодействия с самоустанавливающимся и дополнительным упорами, при этом склиз жестко закреплен на неподвижной раме и выполнен в виде прямолинейной направляющей, а дополнительный упор установлен с возможностью его отклонения при отсутствии контакта между лыжей и склизом 1.
Недостаток данного механизма заключается в том, что механизм имеет большую металлоемкость вследствие того, что склиз устанавливается почти по всей длине рамы, к тому же для крепления склиза нужно определенное количество кронштейнов, которые также изготавливаются из металла. Кроме того, при применении форм-вагонеток с двумя кронщтейнами каретке необходимо делать пробег, равный длине формы5 вагонетки, чтобы не захватить последнюю за передний кронщтейн. Все это ведет к повыщению металлоемкости.
Целью изобретения является снижение металлоемкости.
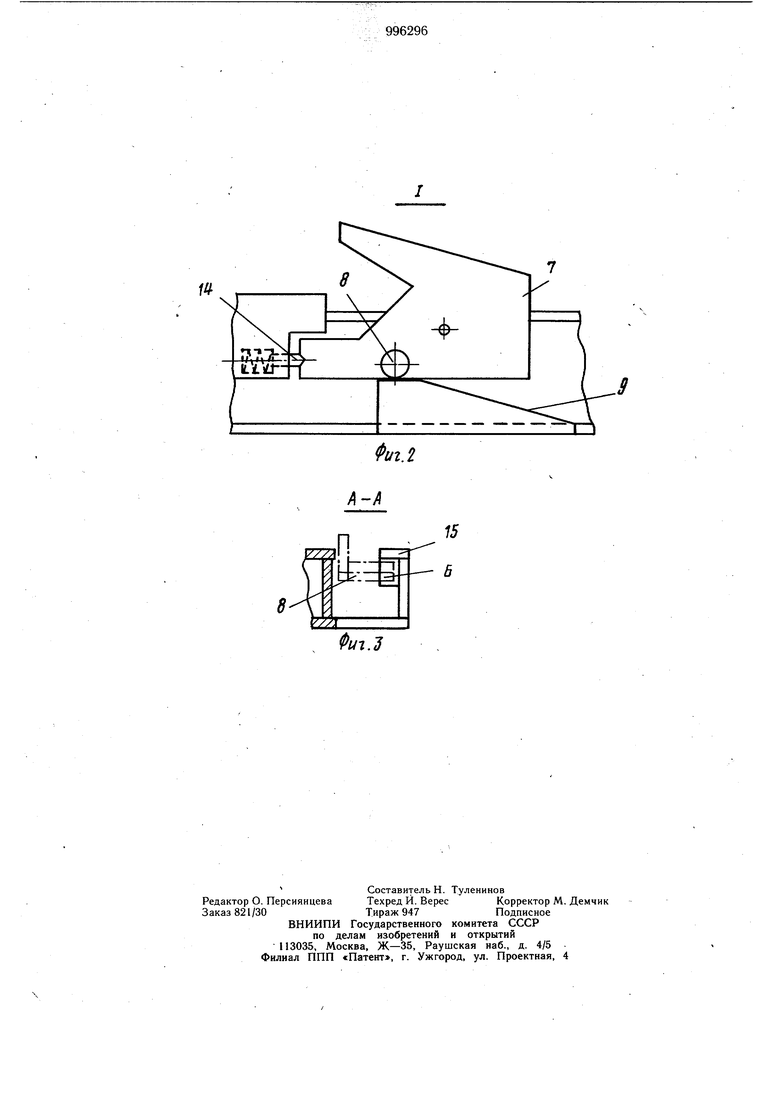
Эта цель достигается тем, что в меха10низме для перемещения грузов, содержащем неподвижную раму, установленную на ней каретку с самоустанавливающимся упором и дополнительным упором с лыжей, склиз для контактирования с лыжей и при,5 вод возвратно-поступательного движения каретки, выполненной с двусторонним упором, который установлен с возможностью взаимодействия -с самоустанавливающимся и дополнительным упорами, каретка снабжена фиксатором, установленным с возмож20 ностью взаимодействия с дополнительным .упором, а неподвижная рама имеет дополнительный склиз Г-образной формы, который расположен с возможностью взаимодействия с лыжей. На фиг. 1 показан механизм для иеремещения грузов, общий вид; на фиг. 2 - узел I на фиг. 1; на фиг. 3 - разрез А-А на фиг. 1. Механизм для перемещения грузов содержит ведущую 1 и оборотную 2 звездочки, соединенные тяговой цепью 3, концы которой закреплены на каретке 4, выполненной с самоустанавливающимся упором 5 с противовесом 6 и дополнительным упором 7, снабженным лыжей 8, взаимолействующей со склизом 9, который жестко закреплен на неподвижной раме 10. Форма-вагонетка 11 имеет кронщтейны 12. Так как упоры 5 и 7 находятся на оси, то они имеют возможность проворачивания вокруг нее. Чтобы этого не происходило, имеется двусторонний упор 13, который удерживает упоры 5 и 7 в рабочем положении, предотвращая их разворачивание. Каретка 4 снабжена фиксаторами 14 с возможностью взаимодействия с дополнительным упором 7, а рама 10 имеет дополнительный склиз 15 Г-образной формы, образующий полость Б с возможностью взаимодействия с лыжей 8 для отклонения дополнительного упора 7. Механизм работает следующим образом. Ведущая звездочка 1 приводит в движение тяговую цепь 3, находящуюся в зацеплении с оборотной звездочкой 2, а концы цепи 3 закреплены на каретке 4. Тяговая цепь 3, в свою очередь, приводит в движение каретку 4 с находящимися на ней упорами 5 и 7. Самоустанавливающийся упор 5 постоянно поднят в рабочем положении за счет противовеса 6 и двустороннего упора 13 и при движении каретки 4 захватывает за кронщтейн 12 форму-вагонетку 11, перемещая ее вперед. Дополнительный упор 7 с лыжей 8 поднят за счет ТОГО, что дополнительный упор 7 взаимодействует с фиксатором 14. При необходимости вернуть форму-вагонетку 11 обратно, включают ведущую звездочку 1 на обратный ход. Дополнительный упор 7 захватывает за кронштейн 12 форму-вагонетку 11 и перемещает ее назад. При ненадобности возвращать форму-вагонетку 11 упор перемещает ее до конечного положения, при этом лыжа 8 заходит в полость Б дополнительного склиза 15, установленного на раме 10, опуская дополнительный упор 7, выходя из зацепления с фиксатором 14. При возвращении каретки 4 за следующей формой-вагонеткой 11 лыжа 8 проходит под Г-образным склизом 15, заходит на склиз 9 и поднимает дополнительный упор 7, сцепляя его с фиксатором 14. Далее цикл повторяется. Таким образом, за счет устранения прямолинейной направляющей предлагаемое изобретение позволяет уменьщить металлоемкость механизма для перемещения грузов. Формула изобретения Механизм для перемещения грузов по авт. св. № 848436, отличающийся тем, что, с целью снижения металлоемкости, каретка снабжена фиксатором, установленным с возможностью взаимодействия с дополнительным упором, а неподвижная рама имеет дополнительный склиз Г-образной формы, который расположен с возможностью взаимодействия с лыжей. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 848436, кл. В 65 G 25/08, 1979 (прототип).
ФигЛ

| название | год | авторы | номер документа |
|---|---|---|---|
| Механизм для перемещения грузов | 1979 |
|
SU848436A1 |
| Привод перемещения преимущественно форм в конвейерной линии по производству железобетонных изделий | 1987 |
|
SU1535735A1 |
| Устройство для перемещения и фиксации вагонеток | 1980 |
|
SU939351A1 |
| Устройство для перемещения груза | 1981 |
|
SU1020318A2 |
| Устройство для передвижения обжиговых вагонеток | 1979 |
|
SU855369A1 |
| Автоматизированный склад | 1980 |
|
SU992344A1 |
| Устройство для шаговых перемещений груза | 1989 |
|
SU1698155A1 |
| Механизм передвижения груза | 1982 |
|
SU1039830A1 |
| СПОСОБ ПЕРЕМЕЩЕНИЯ ГРУЗОВ И ПОДЪЕМНО-ТРАНСПОРТНОЕ УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1995 |
|
RU2078934C1 |
| Установка для многострунной резки и укладки кирпича на сушильные вагонетки | 1984 |
|
SU1186497A1 |