Изобретение относится к подъемно-транспортному машиностроению, в частности к погрузочно-разгрузочным устройствам, и может быть использовано для перемещения грузов и оборудования на складах и в производственных помещениях.
Известен механизм передвижения груза, содержащий установленный на раме силовой цилиндр с двусторонним полым щтокрм, через центральное отверстие которого пропущена тяговая цепь, смонтированная с возможностью взаимодействия с перемещаемым грузом и с храповой собачкой, которая закреплена на одном из свободных концов штока силового цилиндра 1.
Недостатком этого механизма является отсутствие возможности реверсивного движения тяговой цепи с грузом.
Цель изобретения - расширение функциональных возможностей механизма путем обеспечения его реверсирования.
Цель достигается тем, что механизм- передвижения груза, содержащий установленный на раме силовой цилиндр с двусторонним полым штоком, через центральное отверстие которого пропущена тяговая цепь, смонтированная с возможностью взаимодействия с перемещаемым грузом и с храповой собачкой, которая закреплена на одном из свободных концов штока силового цилиндра, снабжен дополнительной храповой собачкой, закрепленной на другом свободном конце штока, причем храповые собачки подпружинены и установлены с возможностью взаимодействия с подпружиненными толкателями, которые закреплены на концах штока и соединены между собой тягой, связанной с шарнирно закрепленным на одном из концов штока фиксатором крайних положений последней.
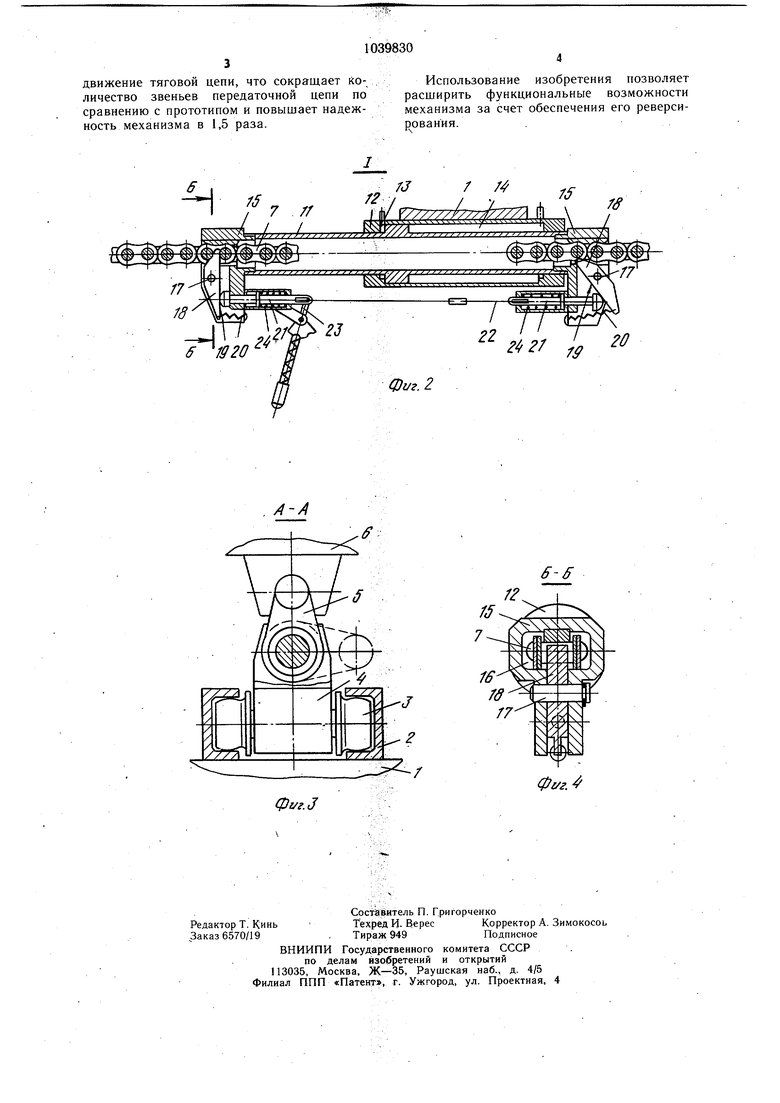
На фиг. 1 изображен механизм, общий вид; на фиг. 2 - узел I на фиг. 1 (продольный разрез силового цилиндра); на фиг. 3 - сечение А-А на фиг. 1; на фиг. 4 - сечение Б-Б на фиг. 2.
Механизм передвижения груза содержит раму 1 с направляющими 2, в которых на катках 3 установлена каретка 4 с откидным толкателем 5 груза 6. Каретка вмонтирована в замкнутую тяговую цепь 7, установленную вдоль направляющих 2 на звездочках 8 и 9. Звездочка 8 соединена с механизмом натяжения 10 тяговой цепи и размещена у одного конца направляющих 2, а звездочка 9 - на неподвижной оси у другого конца направляющих. Нижняя ветвь тяговой цепи 7 пропущена через полый двусторонний щток 11 силового цилиндра 12, имеющего полости 13 и 14 и закрепленного на раме 1. На концах штока смонтированы головки 15 с профилированными отверстиями 16, ограничивающими поперечные перемещения тяговой цепи. В профилированных отверстиях на осях 17 установлены храповые собачки 18, причем их
рабочие поверхности 19 обращены другк другу, подпружинены пружинами 20, поджаты к толкателям 21 и имеют возможность взaимoдeйcтв я с цепью 7. Толкатели 21 соединены между собой тягой 22, связанной -с фиксатором 23 для фиксации тяги в
крайних положениях. Толкатели 21 могут перемещаться в головках 15 параллельно тяговой цепи 7 под действием пружин 24 или тяги 22. Для поддержания цепи на раме 1 установлены опорные ролики 25.
При передвижении груза механизм работает следующим образом.
Перед началом передвижения откидной толкатель 5 каретки 4 откидывается в рабочее положение, а фиксатор 23 переводит0 ся в положение, обеспечивающее фиксацию тяги 22 в заднем крайнем положении. Рабочая жидкость под давлением из гидросистемы подается в полость 13 силового.цилиндра 12 и перемещает поршень со штоком 11
5 вправо. При этом храповая собачка 18 левой головки 15 поджимается пружиной 20 к толкателю 21 и входит в зацепление с тяговой цепью 7, а храповая собачка правой головки отжимается от цепи толкателем 21 под действием пружины 24. Движение штока 11 через храповую собачку 18 левой головки 15 передается тяговой цепи 7, которая передвигается вместе с кареткой 4 на величину хода штока. При достижении штоком 11 конечного положения, рабочая жидкость подается в полость 14, что вызывает движение щтока в противоположном направлении. При этом собачка 18, левой головки 15 под действием втулок тяговой цепи 7 поворачивается на оси 17, отжимается от толкателя 21 и скользит по цепи.
0 о
Затем работа механизма повторяется до
окончательного передвижения груза или подхода каретки 4 с толкателем 5 к концу направляющих 2. Для возврата каретки в исходное положение, а также для изменения направления перемещения груза, фиксатор 23 переводится в противоположное положение. Вместе с ним перемещается тяга 22 и толкатель 21. Дальнейщая работа аналогична.
Для сокращения времени перегрузки механизм предусматривает наличие на нижней ветви цепи второго гидроцилиндра, который совершает рабочее движение щтока при холостом ходе штока первого гидроци5 линдра.В предложенном механизме передвижения грузов щток силового гидроцилиндра при помощи храповых собачек передает
движение тяговой цепи, что сокращает количество звеньев передаточной цепи по сравнению с прототипом и повышает надежность механизма в 1,5 раза.
Использование изобретения позволяет расширить функциональные возможности механизма за счет обеспечения его реверсирования.
| название | год | авторы | номер документа |
|---|---|---|---|
| Привод шаговых перемещений | 1990 |
|
SU1778048A1 |
| Устройство для ориентирования изделий на конвейере | 1985 |
|
SU1281488A1 |
| Устройство для перегрузок подвесок подвесного конвейера с одного пути на другой | 1974 |
|
SU682431A1 |
| Устройство для подачи электроднойпРОВОлОКи | 1979 |
|
SU821094A1 |
| Струговая установка | 1981 |
|
SU1076577A1 |
| Линия для изготовления маканых изделий | 1985 |
|
SU1291428A1 |
| ВЕЛОСИПЕД И РЫЧАЖНО-ХРАПОВОЙ МЕХАНИЗМ | 1999 |
|
RU2155141C1 |
| ПРИВОД ЦЕПНОГО ПУЛЬСИРУЮЩЕГО КОНВЕЙЕРА | 1972 |
|
SU326114A1 |
| Гидравлический толкатель вагонеток | 1977 |
|
SU1033775A1 |
| Устройство для ориентации длинномерных заготовок | 1978 |
|
SU700248A1 |
МЕХАНИЗМ ПЕРЕДВИЖЕНИЯ ГРУЗА, содержащий установленный на раме силовой цилиндр с двусторонним полым штоком, через центральное отверстие которого пропущена тяговая цепь, смонтированная с возможностью взаимодействия с перемещаемым грузом и с храповой собачкой, которая закреплена на одном из свободных концов штока силового цилиндра, отличающийся тем, что, с целью расщирения функциональных возможностей механизма путем обеспечения его реверсирования, он снабжен дополнительной храповой собачкой, закрепленной на другом свободном конце щтока, причем храповые собачки подпружинены и установлены с возможностью взаимодействия с подпружиненными толкателями, которые закреплены на концах щтока и соединены между собой тягой, связанной с щарнирно закрепленным на одном из концов щтока фиксатором крайних положений последней. i (Л 00 со 00 ОО
6-5
Г5
Фг/г.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| УСТРОЙСТВО для ПЕРЕДВИЖКИ ШТРЕКОВОГО ОБОРУДОВАНИЯ | 0 |
|
SU205773A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
