(54)МЕХАНИЗМ ДЛЯ ПЕРЕМЕЩЕНИЯ ГРУЗОВ

| название | год | авторы | номер документа |
|---|---|---|---|
| Механизм для перемещения грузов | 1981 |
|
SU996296A2 |
| Привод перемещения преимущественно форм в конвейерной линии по производству железобетонных изделий | 1987 |
|
SU1535735A1 |
| Толкатель для перемещения вагонеток | 1981 |
|
SU977918A1 |
| Установка для многострунной резки и укладки кирпича на сушильные вагонетки | 1984 |
|
SU1186497A1 |
| Автоматическая линия для производства керамических изделий | 1986 |
|
SU1369898A1 |
| Толкатель для перемещения вагонеток | 1979 |
|
SU879232A1 |
| УСТАНОВКА ДЛЯ ИЗГОТОВЛЕНИЯИЗДЕЛИЙ | 1970 |
|
SU282996A1 |
| Устройство для приема и сталкивания вагонеток | 1982 |
|
SU1039831A1 |
| Цепной безкотлованный толкатель | 1976 |
|
SU596720A1 |
| Подвесной толкающий конвейер | 1981 |
|
SU1058840A1 |
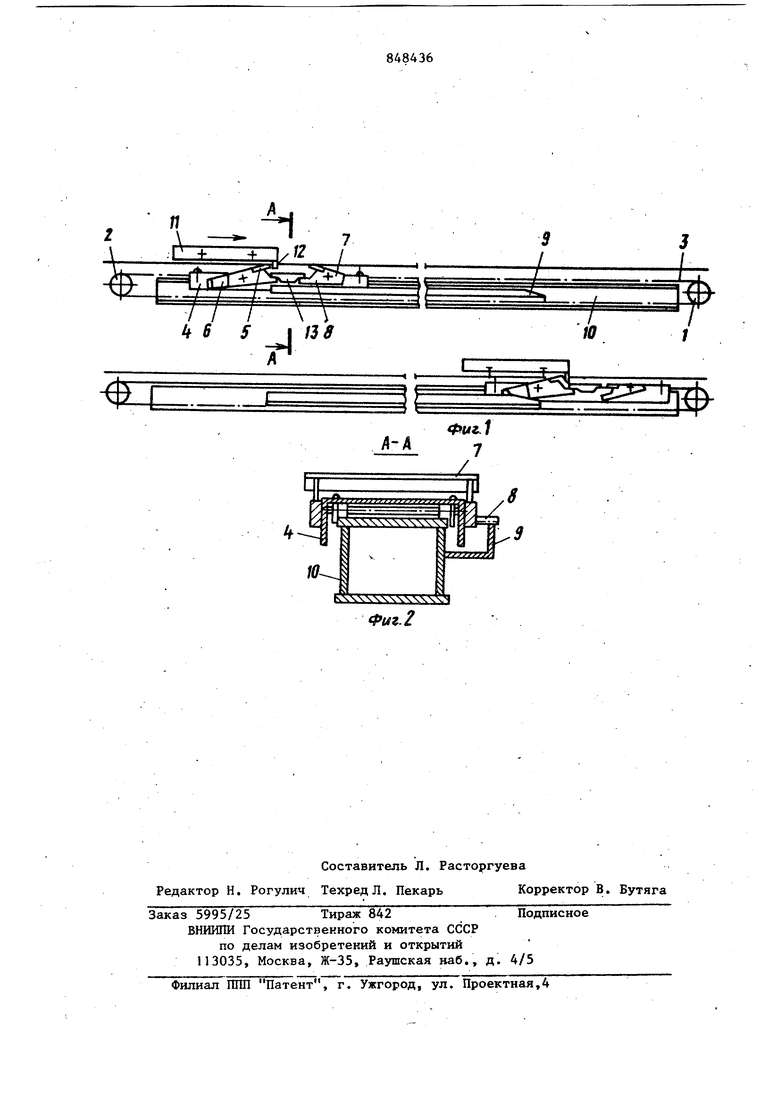
Изобретение относится к технологи ческому оборудовании для изготовления сборного железобетона на предприятиях строительной индустрии для конвейерного производства, в частнос ти толкателей формовочных. Известно устройство для перемещения грузов, включающее привод, тележку-толкатель , содержащую тягу, подпружиненный толкатель и упоры, тележка-толкатель снабжена консолью с расположенным на ней подпружиненны толкателем, а на трассе тележки толк теля установлены ограничители, взаим действуннцие с тягой и упорами толкателя рЗ. Наиболее близким к предлагаемому техническим решением является механизм для перемещения грузов, содержащий неподвижную раму, установленную на ней каретку с самоустанавливающимся упором и дополнительным упором с лыжей, склиз для контактирования с лыжей и привод возвратно-поступательного движения каретки . Недостаток указанных устройств состоит в сложности механизма переключения упоров при изменении направления перемещения грузов. Цель изобретения - упрощение конструкции толкателя. Указанная цель дбстигается тем, . что каретка выполнена с двусторонним упором, который установлен с возмож-. ностью взаимодействия с самоустанавливаю1цимся и дополнительным упорами,; при этом склиз жестко закреплен на неподвижной раме и выполнен в виде прямолинейной направляющей, а дополнительный упор установлен с возможностью его отклонения при отсутствии контакта между лыжей и склизом. На фиг. 1 показано устройство, общий вид; на фиг. 2 - разрез А-А на фиг. 1. Ведущая 1 и оборотная 2 звездочки соединены тяговой цепью 3, концы которой закреплены на каретке 4, выполненной с самоустанавливающим упором
5с противсвесом 6 и дополнительным упором 7, снабженным лыжей 8, взаимодействующей со склизом 9, который жестко закреплен на неподвижной раме и вьтолнен в виде прямолинейной направляющей 10. Форма-вагонетка II имеет кронштейн 12.
Так как упоры 5 и 7 находятся на
оси, то они имеют возможность ПрОВО- 1Q
рачивания вокруг нее. Предотвращая их разворачивание имеется двусторонний упор 13, который удерживает упоры 5 и 7 в рабочем положении. При этом, дополнительный упор 7 уста- j5 новлен с возможностью его отклонения при отсутствии контакта междулыжей 8 и склизом 9.
Механизм работает следующим образом.20
Ведущая звездочка 1 приводит в.движение тяговую цепь 3, находящуюся в зацеплении с оборотной звездочкой 2, а концы цепи 3 закреплены на каретке 4, Тяговая цепь 3 в свою очередь 25 приводит в движение каретку 4 с находящимися на ней упорами 5 и 7.
Самоустанавливающийся упор 5 Постоянно поднят за счет противовеса
6и при дрижении каретки 4 захваты- зо вает за кронштейн 2 форму-вагонетку 11, перемещая ее вперёд. Упор 7 с лыжей 8 поднят за счет того, что лыжа
8 лежит на склизе 9, установленным на направляющей 10, при необходимости верзз нуть форму-вагонетку 11 обратно включают ведущую звездочку 1 на обратный ход. Упор 7 захватывает за кронштейн 12 форму-вагонетку 11 и перемещает ее назад. При ненадобности возвращать 40 форму-вагонетку, упор 5 перемещает
ее до конечного положения, при этом лыжа,8 сходит со склиза 9 опуская упор 7. При возвращении каретки 4 за следующей формой-вагонеткой лыжа проходит под кронштейном 12, заходит на склиз, поднимая- упор 7. Далее цикл повторяется.
Предлагаемое устройство имеет простую конструк1,ию, обеспечивающую форме-вагонетке обратный ход.
Формула изобретения
Механизм для перемещения грузов, содержащий неподвижную раму,установленую на ней каретку с самоустанавливающимся упором и дополнительным упором с лыжей, склиз для контактирования с лыжей, и привод возвратнопоступательного движения каретки, отличающийся тем, что, с целью упрощения конструкции, каретка выполнена с двусторонним упором, котрый установлен с возможностью взаимодействия с самоустанавливающимся и дополнительным упорами, при этом склиз жестко закреплен на неподвижно раме и выполнен в виде прямолинейной направляющей а дополнительный упор установлен с возможностью его отклонения при/отсутствии контакта между лыжей и склизом.
Источники информации, принятые во внимание пр.и экспертизе
2,Авторское свидетельство СССР № 537007,-кл. В 65 Q 25/08, 1973 (прототип). А ч.- Ь12
Фиг. 2 1
