Изобретение относится к землерой- ным машинам, а конкретнее к одноков|1ювым экскаваторам со сменными рабочими органами.
Известно устройство для соединенияв рукояти экскаватора с различными рабочими органами, включающее траверсу, соединенную с рукоятью, на конце которой выполнены захваты для соединения с рабочими органами, при этом один захват подпружинен и соединен с гидроцилиндром Cl.
Однако указанное устройство не обеспечивает надежного соединения рукояти с ковшом из-за вилочных захватов, силовое,замыкание которых осуществляется под действием пружины.
Наиболее близким техническим решением к изобретению является устройствр для соединения рабочего органа с рукоятью экскаватора, включающее траверсу с клиновидным выступом, шарнирно установленную на рукояти, направляющие, закрепленные на раоочем органе с возможностью их соединения р КЛИН9ВИДНЫМ выступом,и фиксатор C2l.
Однако фиксатор в этом устройстве не обеспечивает надежного соединения рабочего органа с рукоятью экскаватора.
Цель изобретения - повышение надежности соединения.
Указанная цель достигается тем, что в устройстве для соединения рабочего органа с рукоятью экскаватора,, включакяцем траверсу с клиновидным выступом, шарнирно установленную на рукояти, направлякицее, закрепленные на рабочем органе с возможностью их
to соединения с клиновидным выступом, и фиксатор,фиксатор выполнен в виде установленных на траверсе запорного гидроцилиндра с гидрозамком, подпружиненной поворотной защелки и упора., закреп15ленного на рабочем органе, при этом защелка установлена с возможностью взаимодействия с одной стороны со штоком запорного гидроцилиндра, а с другой - с упором.
20
Как вариант, фиксатор может быть выполнен в виде установленных на траверсе опорной гильзы с резьбой и запорного винта с контргайкой, подпружиненной защелки и упора, закреплен25ного на рабочем органе, при этом защелка установлен с возможностью взаимодействия с одной стороны с запорным винтом, а с другой - с упором.
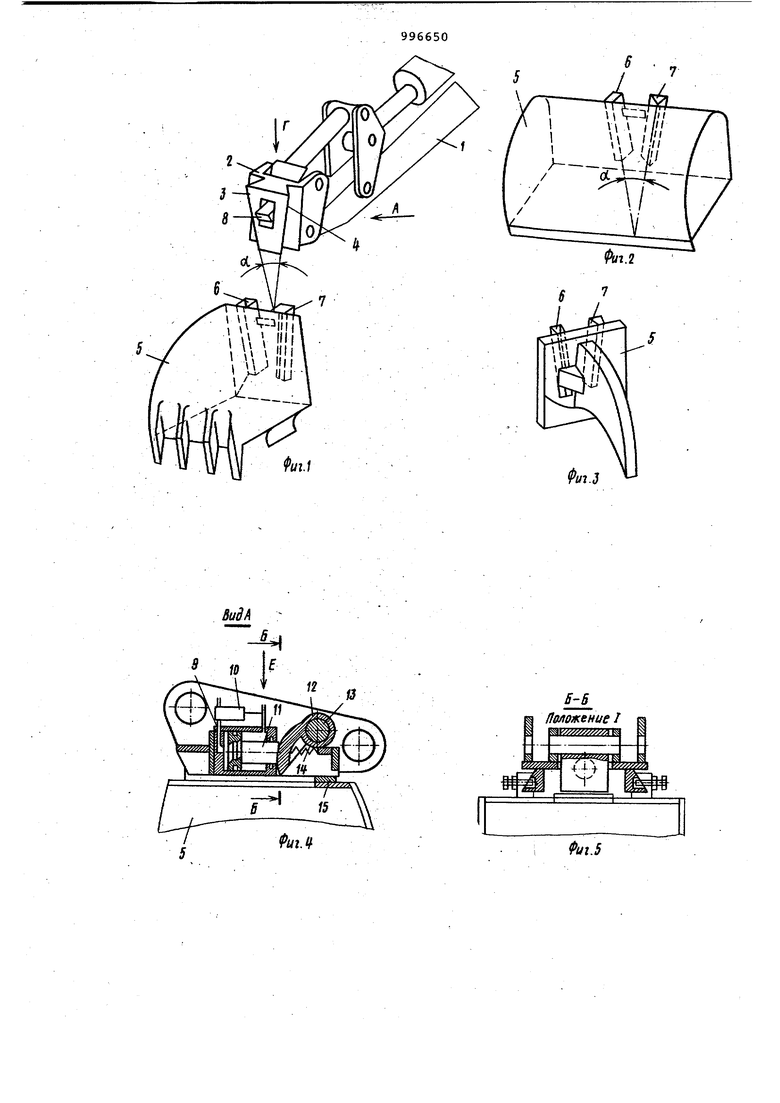
На фиг.1 изображено устройство для
30 соединения рабочего органа с рукоятьк
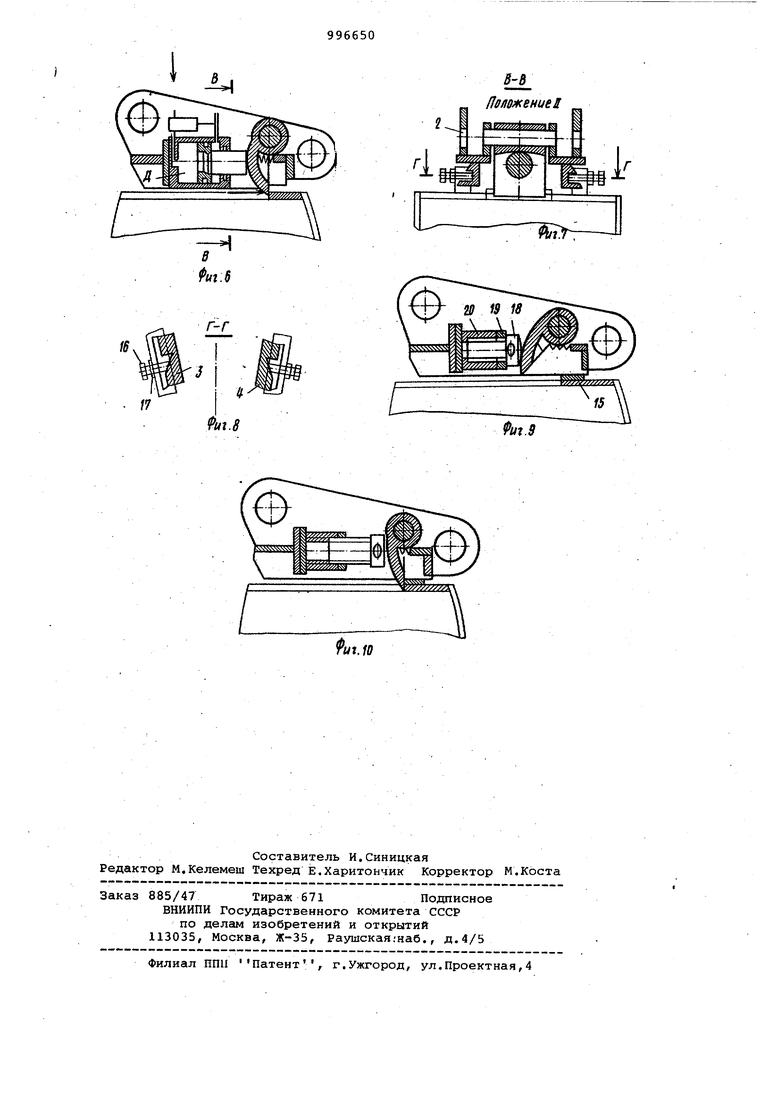
экскаватора; на фиг.2,3 - смежное оборудование .4 - вид А на фиг.1; на фиг.5 - разрез Б-В на фиг. на фиг.б - схема взаимодействия шток запорного гидроцилиндра с защелкой и упором.; на фиг.7 разрез В-В на фиг.6; на фиг.8 - разрез Г-Г на фиг.7; на фиг.9 и 10 - варианты устройства.
Устройство для соединения рабочего органа с рукоятью 1 содержит траверсу 2 на которой выполнен клиновидный шип с боковьлми направляющими 3 и 4. Нарабочем органе 5 закреплены направляющие б и 7, образующие клиновой паз с наклонными поверхностями для соединения с клиновидным шипо На траверсе установлен фиксатор 8, состоящий из запорного гидроцилиндра 9 с управляемым гидрозамком 10 и поршнем со штоком И, поворотной защелки 12 на оси 13 и пружиной 10 с упором 15, закрепленным на рабочем органе 5. При длительной работе фиксация рабочего органа может дополнительно обеспечиваться затяжкой болто 16 и контрг айкой 17.
В качестве варианта устройства вместо запорного гидроцилиндра 9 на его место может быть установлен за.порный винт 18 с контргайкой 19 и опорной гильзой с резьбой. 20.
Работа устройства состоит в следующем .
При соединении рукояти экскаватор вводят шип рукояти узким концом в клиновой паз на рабочем органе до упора так, что направляющие 3 и 4 взаимодействуют с направляющими 6 и 7. После этого из гидросистемы .экскаватором рабочая жидкость подается в бесштоковую полость д запорного гидроцилиндра 9, шток которого выдвигается, поворачивая защелку 12 из положения I (фиг.5) в положение П (фиг.7),прижимает ее к упору 15 рабочего органа 5 так что натягивае ся на траверсу 2.
Для отсоединения рабочего органа от РУКОЯТИ экскаватора рабочая жидкость подается в штоковую полость и освобождает защелку 12, которая пружиной 14 переводится в положение Т , подъемом рукояти клиновидный шип с направляющими 3 и 4 выводит из направляющих 7 и 8 рабочий орган 5,
При длительной работе одним рабочим органом его фиксация может осуществляться затяжкой болтов 16 и контргайками 17, при этом запорный гидроцилиндр не нагружается, так как фиксируются направляющие 3 и 4 относительно рабочего органа 5.
Использование предложенного изобретения обеспечивает надежное соединение различных рабочих органов с рукЬятью экскаватора и их надежную фиксацию во время работы.
Формула изобретения
1.Устройство для соединения рабочего органа с рукоятью экскаватора включающее траверсу с клиновидным выступом, шарнирно установленную на рукояти, направляющие, закрепленные на рабочем органе с возможностью их соединения с клиновидным выступом, фиксатор, отличающееся тем, что, с целью повышения надежности соединения, фиксатор- выполнен в виде установленных на траверсе запорного гидроцилиндра с гидрозамксм, подпружиненной поворотной защелки
и упора, закрепленного на рабочем органе, при этом защелка установлена с возможностью взаимодействия с одной стороны со ШТОКОМ запорного гидроцилиндра, а с другой - с упором
2.Устройство для соединения рабочего органа с рукоятью экскаватора, включающее траверсу с клиновидным . выступом, шарнирно установленную на рукояти, направляющие, закрепленные на рабочем органе с возможностью их соединения с клиновидным выступом,
и фиксатор, от.лич ающееся тем, что фиксатор выполнен, в виде установленных на траверсе опорной гильзы с резьбой и запорного винта с контргайкой, подпружиненной защелки и упора, закрепленного на рабочем органе, при этом защелка установлена с возможностью взаимодействия с одной стороны с запорным винтом, а с другой - с упором.
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР 616375, кл. Б 02 F 3/96, 1977.
2,Авторское свидетельство СССР по заявке № 2833010/29-03,
кл. Е 02 F 3/81, 1979 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для соединения рабочегоОРгАНА C РуКОТью эКСКАВАТОРА | 1979 |
|
SU853018A1 |
| Устройство для соединения сменного рабочего органа с рукоятью манипулятора | 1984 |
|
SU1247470A1 |
| Подвеска рабочего органа одноковшового экскаватора | 1985 |
|
SU1377337A1 |
| Устройство для крепления съемного ковша гидравлического экскаватора | 1982 |
|
SU1021722A1 |
| Рабочее оборудование гидравлического экскаватора | 1984 |
|
SU1242587A1 |
| ПОВОРОТНАЯ ЗАСЛОНКА | 2014 |
|
RU2560135C1 |
| Система гидропривода регулирующей арматуры эксплуатационной линии | 2022 |
|
RU2788273C1 |
| Устройство для соединения рабочего органа с рукояткой экскаватора | 1985 |
|
SU1283302A1 |
| ПЕРЕДВИЖНАЯ УСТАНОВКА ДЛЯ ВОЗБУЖДЕНИЯ СЕЙСМИЧЕСКИХ ВОЛН | 2005 |
|
RU2289150C1 |
| ОПОРНО-ПОВОРОТНОЕ УСТРОЙСТВО КРАНОМАНИПУЛЯТОРНОЙ УСТАНОВКИ | 2001 |
|
RU2230699C2 |
Г-Г
Ul.B
В-В
JoaoiKeHueS
