(54) МЕХАНИЗМ СВОБОДНОГО ХОДА

| название | год | авторы | номер документа |
|---|---|---|---|
| Муфта свободного хода | 1987 |
|
SU1474353A1 |
| СЕКТОРНАЯ МУФТА СВОБОДНОГО ХОДА | 1996 |
|
RU2113642C1 |
| Клиновой механизм свободного хода | 1980 |
|
SU1087714A1 |
| Клиновой механизм свободного хода | 1981 |
|
SU1049701A1 |
| Клиновой механизм свободного хода | 1986 |
|
SU1399541A1 |
| Клиновой механизм свободного хода | 1980 |
|
SU962690A1 |
| Клиновая муфта свободного хода | 1986 |
|
SU1402734A1 |
| МУФТА СВОБОДНОГО ХОДА | 2006 |
|
RU2299363C1 |
| Клиновая муфта свободного хода | 1976 |
|
SU657194A1 |
| КЛИНОВОЙ МЕХАНИЗМ СВОБОДНОГО ХОДА | 2004 |
|
RU2279001C1 |
1 - ;
Изобретение отйосится к машиностроению и может быть использовано в импульсных бесступенчатых передачах и трансмиссиях.
Известен механизм свободного хода, содержащий обойму, эксцентрик, установленное на йем промежуточное кольцо, кинематически связанное с обоймой, и - контактирующий с обоймой и подпружиненным кольцом заклинивающий элемент, рабочие участки которого выполнены разными радиусами с эксцентриситетом .
i Однако в такой муфте заклинивающий элемент испытывает усилия сжатия, что при включении муфты создает динамические нагрузки, уменьшаемые Надежность муфты.
Целью изобретения является повышение надежности путем уменьшения динамических нагрузок.
Поставленная цель достигается тем, что в механизме свободного хода, содержащем обойму, эксцентрик, установленное на нем промежуточное кольцо, кинематически связанное с обоймой, и контактирующий с обоймой и промежуточным кольцом заклинивающий элемент, рабочие участки которого
образованы двумя цилиндрическими поверхностями, оси которых смещены относительно оси обоймы, заклинивающий элемент выполнен в виде кольца, охватывающего промежуточное кольцо и обойму и
5 контактирующего одним рабочим участком с поверхностью промежуточного кольца, а другим - с Наружной поверхностью обоймы.
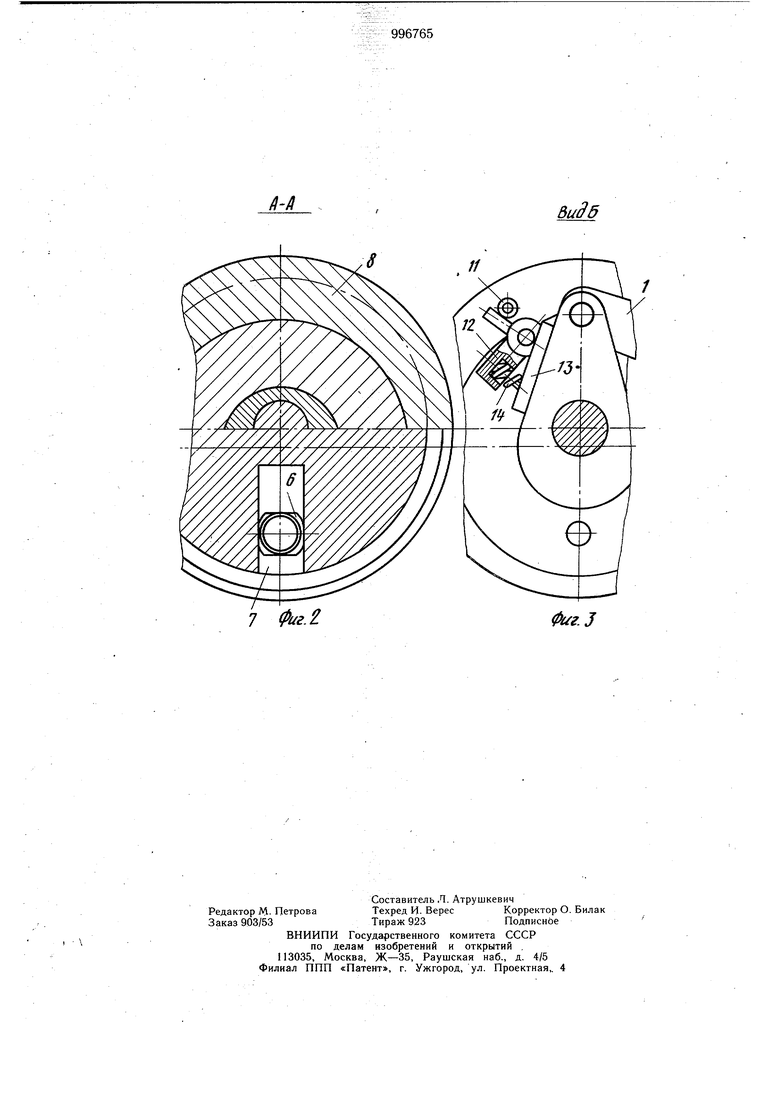
На фиг. 1 показан механизм, осевой разрез; на фиг. 2 - разрез А-А на фиг. 1;
110 на фиг. 3 - вид Б на фиг. 1.
Механизм содержит шатун 1, обойму 2, выполненную в виде диска, эксцентрик 3 и свободно надетое на него промежуточное кольцо 4 кинематически связанное с
15 обоймой посредством пальца 5 с надетым на него камНем 6,- находящимся в пазу 7 обоймы 2. На наружную цилиндрическую поверхность обоймы 2 свободно надет заклинивающий элемент в виде эксцентрикового кольца 8. Рабочие поверхности 9 и 10 заклини20вающего элемента контактируют с обоймой 2 и промежуточным кольцом 4, выполнены различными радиусами с эксцентриситетом и расположены на кольце со стороны оси муфты. Эксцентриковое кольцо несет
на себе упор 11 поворотного рычага 12, который шарнирно установлен на опоре 13, закрепленной на эксцентрике 3 и подпружинен пружиной 14.
Предлагаемый механизм работает следующим образом.
При перемещении щатуна 1 поворачивается, например, эксцентрик 3 против часовой стрелки. При этом поворот эксцентрика приводит к перемещению промежуточного кольца 4 в радиальном направлении. Промежуточное кольцо, воздействуя на э ксцентриковое кольцо 8, осуществляет заклинивание механизма, так как повороту эксцентрикового кольца против часовой стрелки препятствует подпружиненный рычаг.
При перемещении эксцентрика 3 в направлении по часовой стрелке заклинивание не происходит, так как эксцентриковое кольцо 8 под действием пружины 14 проворачивается вслед за эксцентриком.
Предлагаемый механизм свободного хода надежнее в работе, так как его эксцентриковое кольцо обладает больщей упругостью по сравнению с клином в механизме прототипа, что обуславливает существенное
снижение динамических нагрузок при заклинивании.
Формула изобретения
Механизм свободного хода, содержащий обойму, эксцентрик, установленное на нем промежуточное кольцо, кинематически связанное с обоймой, и контактирующий с обоймой и промежутчным кольцом заклиниваюQ щий элемент, рабочие участки которого образованы двумя цилиндрическими поверхностями, оси которых смещень относительно оси обоймы, отличающийся тем, что, с целью повыщения надежности путем уменьщения динамических нагрузок, заклинивающий элемент выполнен в виде кольца, охватывающего промежуточное кольцо и обойму и контактирующего одним рабочим участком с поверхностью промежуточного кольца, а другим - с наружной поверхностью обоймы.
Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 497431, кл. F 16 D 41/06, 1974 (прототип) .
fi-fi
8идб
7 фиг. 2
Фиг.З
