Изобретение относится к машиностроению, а именно к транспортным системам поточных линий спутникового типа для транспортировки деталей и узлов при их рбработке, сборке или сварке.
Известна транспортная система поточной линии, содержащая раму с верхними и - нижними неподвижнымш направляющими, спутники, толкатель, установленные на входе и выходе линии подъемники с каретками и поворотные секции направляющих
Недостатком известной системы является ее сложность, и вследствие этого невысокая надёжность.
Целью изобретения является упрощение конструкции и повышение надежности.
Для достижения указанной цели поворотные секции верхних направляющих на выходе линии снабжены рычагами, повернутыми друг относительно друга на осях направляющих, каретка подъемника на выходе линии снабжена упорами, установленными на разных
уровнях с возможностью взаимодействия поочередно при подъеме и опускаНии с соответствующими рычагами направляющих.
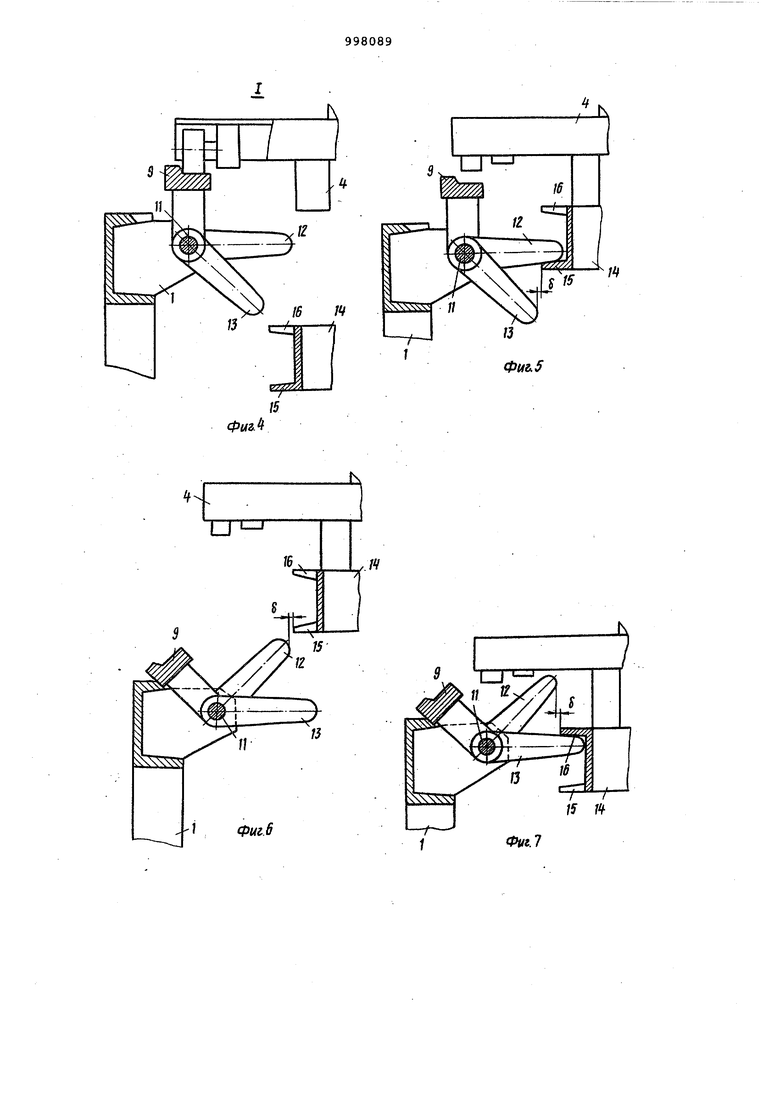
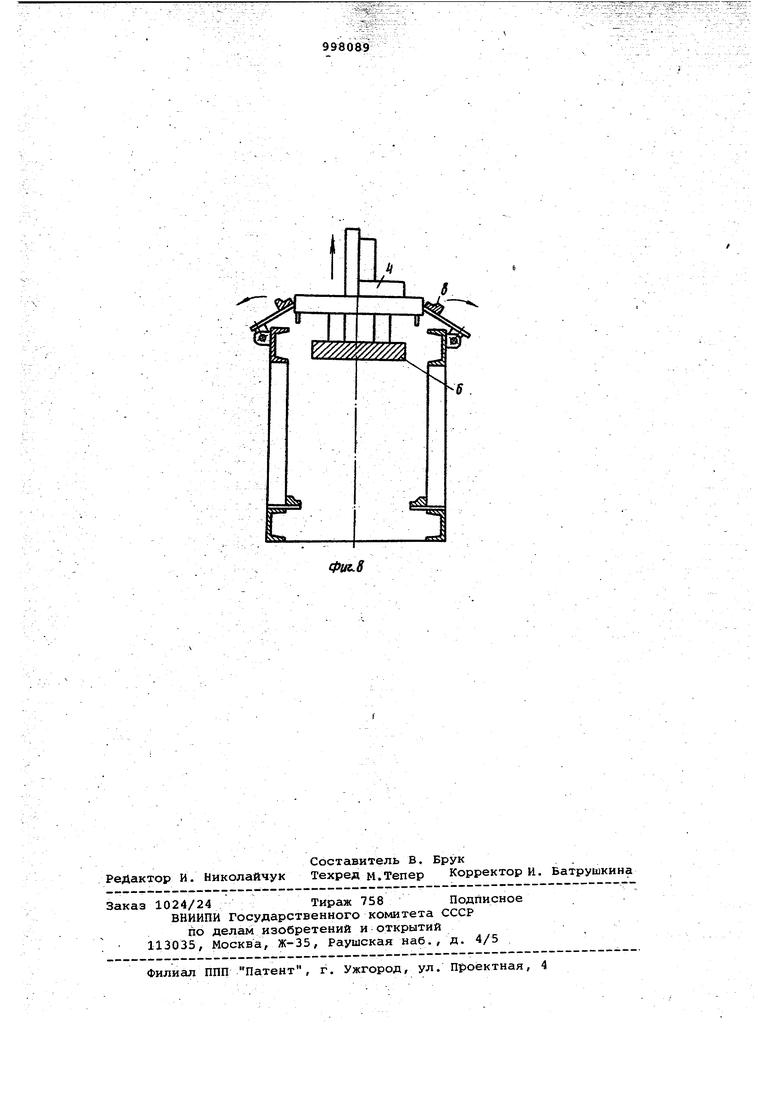
На фиг. 1 представлена транспортная система, общий вид/ на фиг. 2 разрез А-А на фиг. 1I на фиг. 3 вид Б на фиг. 2/на фиг., 4 - узел I на фиг. 2 (каретка подъемника в исходном- положении) , на фиг. 5 - спутник приподнят над направляющими; на фиг 6 - поворотные секции откинуты; на фиг. 7 - упор для возврата
10 в момент взаимодействия с рычагом возврата поворотных секций в исходное положение; на фиг. 8 - подъемник на входе линии.
Транспортная система состоит из
15 рамы 1, верхних 2 и нижних 3 наклонных неподвижных направляющих, приспособлений-спутников 4, толкателя 5, установленных на входе и выходе линии подъемников 6 и 7, поворотных
20 секций 8 верхних направлякжцих на входе линии и поворотных секций 9 на выходе и электромагнитного стопора 10. Поворотные секции 9 верхних направляющих на выходе линии снаб25жены (фиг. 2 и 3) повернутыми друг относительно друга на осях 11 секций 9 открывающим 12 и закрывающим 13 рычагами, а каретки 14 подъемника 7 - установленными на разных уров30нях упорами 15 и 16, взаимодействующими поочередно при подъеме и опускании каретки 14с рычагами 12 и 13 соответственно, Толкатель представляет собой упо выполненный в виде храповой собачки, шарнирно посаженной на цепь, совершающую возвратно-поступательное движение. Причем упор посажен таким образом, что при движении впе ред он толкает на шаг взаимодейству щий с ним спутник, который в свою очередь переталкивает весь ряд. Спу ник, прошедший поворотные секции на входе линии, по наклонным направляю щим перемещается за взаимодействующим с толкателем спутником. Транспортная система работает следующим образом. Во время выполнения технологических операций на позициях линии элект ромагнитный стопор io утапливается, приспособление-спутник 4 по наклонным нижним направляющим 3 поступает на вход линии, откуда подъемником 6 поднимается выше уровня поворотных секций направляющих на входе. При этом секции 8 отклоняются спутником 4, пропуская его в крайнее верхнее положение, после чего под действием собственного веса возвращаются в исходное положение и образуют колею с направляющими 2.. После окончания технологических операций на позициях линии готовое изделие снимается со спутника 4, находящегося на выходе линии, аподъ емник 7 на выходе поднимается вверх 8начале подъема каретки 14 подъемника 7 закрывающий упор 16 (находящийся выше открывающего упора 15) свободно проходит мимо открывающего рычага 12, так как он смещен относительно последнего в плане. При дальнейшем движении каретки 14 она снимает спутник 4 с секций 9 ив конце хода, взаимодействуя открывающим упором 15 с открывающим рычагом 12, отклоняет поворотные секции 9 направляющих. Под действием собственного веса поворотные секции 9отклоняются до упора в раму 1. При этом открывающий рычаг 12 поворачива ется на оси 11 и выходит из зоны дей ствия открывающего упора 15 на расстояние S I а закрывающий рычаг 13, закрепленный на той же оси 11, поворачивается и выводится в зону действия закрывающего упора 16. Каретка 14 соспутником 4 спускаемся вниз. Одновременно с прохождением спутника 4 секций 9 их закрывающие рычаги 13 вступают во взаимодействие с закрывающими упорами 16 и вслед за опускающимся спутником 4 поворачивают секции 9 в исходное положение. Каретка 14 опускается ниже уровня направляющих 3, а свободный спутник 4 удерживается стопором 10. Включаются приводы (не показаны) толкателя 5 и подъемника 6. Одновременно каретка подъемника 6 опускается между секциями направляющих, оставляя на них спутник 4, толкатель 5 перемещает ряд спутников вперед на шаг. При этом спутник 4 по наклонным секциям направляющих перемещается на освободившееся на верхних направляющих 2 место. При движении толкателя назад, с одновременным подъемом на входе, упор наклоняется, проходит под подошедшим в исходное положение для взаимодействия с ним спутником и силою тяжести устанавливается в положение для перемещения вперед. Следующим движением вперед толкатель захватывает скатившийся с наклонных направляющих спутник и толкает его вместе с рядом спутников вперед на шаг. Упрощение конструкции и повышение надежности транспортной системы позволяет снизить стоимость ее изготовления и повысить производительность за счет уменьшения просто- ев вследствие отказов в работе. Формула изобретения Транспортная система поточной лиии , содержащая раму с верхними и ижними неподвижными направляющими, путники, толкатель, установленные а входе и выходе линии подъемники каретками и поворотные секции напавляющих, отличающаяся ем, что, с целью упрощения констукции и повышения надежности, по-, оротные секции верхних направляюих на выходе линии снабжены рычаами, повернутыми друг относительо друга на осях направляющих, а каетка подъемника на выходе линии набжена упорами, установленными на азных уровнях с возможностью взаимоействия поочередно при подъеме и пускании с соответствующими рычаами направляющих. Источники информации, ринятые во внимание при экспертизе 1. Линия сборки и сварки роликопор. Разработчик Донецкий ПКТИ. Череж И 3896.00.00, 1978,
| название | год | авторы | номер документа |
|---|---|---|---|
| ЛИНИЯ ДЛЯ ИЗГОТОВЛЕНИЯ КЕРАМЗИТОБЕТОННЫХ БЛОКОВ | 1995 |
|
RU2078690C1 |
| КОМПЛЕКС ПОДЪЕМНО-ТРАНСПОРТНОГО ОБОРУДОВАНИЯ ДЛЯ УТИЛИЗАЦИИ ЖИДКИХ РАДИОАКТИВНЫХ ОТХОДОВ НА АТОМНОЙ ЭЛЕКТРОСТАНЦИИ И ЕГО СОСТАВНЫЕ ЧАСТИ | 2007 |
|
RU2350545C1 |
| Устройство для опрокидывания контейнеров | 1985 |
|
SU1283201A1 |
| Поточная линия для изготовления железобетонных изделий | 1976 |
|
SU701806A1 |
| Поточная линия формирования колесных пар подвижного состава | 1972 |
|
SU490701A1 |
| Устройство для шагового перемещения спутников | 1985 |
|
SU1305085A1 |
| АВТОМАТИЗИРОВАННАЯ ТРАНСПОРТНО-СКЛАДСКАЯ СИСТЕМА ДЛЯ КОЛЕСНЫХ ШИН | 1990 |
|
RU2013327C1 |
| ПРИВОД УПРАВЛЕНИЯ ПРИСЛОННО-СДВИЖНОЙ ДВЕРИ ТРАНСПОРТНОГО СРЕДСТВА | 2020 |
|
RU2765326C1 |
| Поточная линия для изготовления сварных конструкций | 1978 |
|
SU770715A1 |
| Периодический вертикально-замкнутый конвейер | 1975 |
|
SU749758A1 |

u
и
m
МБ
/«
fpui.i
Фиг.З
