Изобретение относится к управлению угловым движением космического аппарата (КА) с помощью гидросиловых стабилизаторов (СГ).
Известен способ определения параметров разворота, включающий измерение вектора накопленного кинетического момента в системе гиросиловых стабилизаторов на момент времени начала разворота, определение располагаемых значений вектора кинетического момента системы СГ и определение требуемой скорости разворота в направлении угла конечного поворота.
При определении скорости разворота не учитывается, что на продолжительность разворота влияет величина угла конечного поворота, который может иметь два значения: βки 2π-βк.
Целью изобретения является уменьшение времени разворота.
Цель достигается тем, что на момент времени начала разворота измеряют вектор абсолютной угловой скорости КА и определяют вектор кинетического момента корпуса КА Gо. Затем по величине Gо и области S располагаемых значений вектора кинетического момента системы СГ определяют длительность разворота Δ t1 в сторону угла конечного поворота βк и длительность разворота Δ t2 в противоположном направлении по зависимостям
Δt1= 
Δt2=  где Пр
где Пр проекция вектора
проекция вектора  определяемого по выражению
определяемого по выражению  =
=  -
- 
 вектор кинетического момента, начало которого находится в центре области S с обратным направлением единичного вектора кинетического момента корпуса КА при развороте на направление вектора кинетического момента корпуса КА при развороте в сторону угла βк;
вектор кинетического момента, начало которого находится в центре области S с обратным направлением единичного вектора кинетического момента корпуса КА при развороте на направление вектора кинетического момента корпуса КА при развороте в сторону угла βк;
Пр проекция вектора
проекция вектора  , определяемого по выражению
, определяемого по выражению  =
=  -
- 
 вектор кинетического момента, начало которого находится в центре области S, а конец в точке пересечения поверхности области S с направлением единичного вектора кинетического момента корпуса КА при развороте на направление вектора кинетического момента корпуса КА при развороте в сторону угла 2π-βк;
вектор кинетического момента, начало которого находится в центре области S, а конец в точке пересечения поверхности области S с направлением единичного вектора кинетического момента корпуса КА при развороте на направление вектора кинетического момента корпуса КА при развороте в сторону угла 2π-βк;
i тензор инерции КА; единичный вектор конечного поворота, а затем выбирают направление разворота, при котором время разворота вокруг вектора конечного поворота вокруг вектора конечного поворота минимально.
единичный вектор конечного поворота, а затем выбирают направление разворота, при котором время разворота вокруг вектора конечного поворота вокруг вектора конечного поворота минимально.
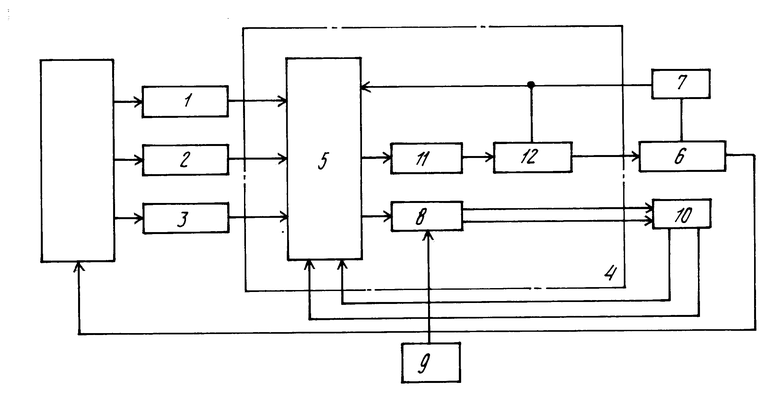
На чертеже представлена система для осуществления предлагаемого способа.
Система состоит из датчиков 1-3 угловой скорости по каналам управления, БЦВМ 4, блока 5 формирования управляющего сигнала, системы 6 СГ, датчика 7 углов поворота осей прецессии 2-степенных СГ, блока 8 расчета длительности разворота, блока 9 ввода информации в БЦВМ, блока 10 сравнения, цифрового фильтра 11, блока 12 управления скоростями прeцессии.
Положительный эффект способа достигается за счет учета суммарного вектора кинетического момента КА, значений вектора кинетического момента СГ и возможных значений углов конечного разворота.
Изобретение относится к управлению угловым движением космического аппарата (КА) с помощью силовых гидростабилизаторов (СГ). Целью изобретения является уменьшение времени разворота. Способ определения разворота включает измерение вектора кинетического момента системы СГ на момент времени начала разворота, определение располагаемых значений вектора кинетического момента системы СГ, измерение вектора абсолютной угловой скорости КА в момент времени начала разворота, определение вектора кинетического момента корпуса КА, определение длительности разворота КА в направлении угла конечного поворота, при котором время разворота КА вокруг вектора конечного поворота минимально, и определение величины требуемой скорости разворота в выбранном направлении. 1 ил.
СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ РАЗВОРОТА ВОКРУГ ВЕКТОРА КОНЕЧНОГО ПОВОРОТА КОСМИЧЕСКОГО АППАРАТА, СНАБЖЕННОГО СИСТЕМОЙ ГИРОСИЛОВЫХ СТАБИЛИЗАТОРОВ, включающий измерение вектора кинетического момента системы гиросиловых стабилизаторов на момент времени начала разворота, определение располагаемых значений вектора кинетического момента системы гиросиловых стабилизаторов и определение требуемой скорости разворота в направлении угла конечного поворота, отличающийся тем, что, с целью уменьшения времени разворота, измеряют вектор абсолютной угловой скорости космического аппарата в момент времени начала разворота, определяют длительности разворота космического аппарата в направлении угла конечного поворота и в направлении, противоположном направлению угла конечного поворота, выбирают направление разворота, при котором время разворота космического аппарата вокруг вектора конечного поворота минимально, и определяют величину требуемой скорости разворота в выбранном направлении.
| Krauton I | |||
| Minimum - time Attitude maneuvers with Control Moment Gyroscopes.-Aiaa, 1970, vol.8, N 8, рр.1523-1525. |
