Изобретение относится к космической технике и может использоваться для эффективного управления угловым положением и движением космических аппаратов (КА), орбитальных станций и перспективных модулей.
Известен способ осуществления переориентации космического аппарата [1] При этом способе управления переориентацией КА в требуемое конечное угловое положение вращение КА осуществляется по назначенным кинематическим траекториям согласно принципу управления по ускорению. Кинематические уравнения желаемого движения космического аппарата при развороте записываются через компоненты кватерниона:
причем:
Λн= Λ(O) кватернион начального положения КА.
Λк= Λ(Tк) кватернион конечного положения КА.
Тк время разворота КА.
Символ "о" означает операцию умножения кватернионов, а символ ~ - взятие сопряженного кватерниона.
Закон управления разворотом КА по прикладываемому моменту оказывается достаточно простым и реализуется следящей системой.
Функциональная схема системы-аналога (фиг. 1) содержит блок 1 задания начального и конечного положений (БЗНКП), блок 2 задания моментов инерции (ВЗМИ), задатчик 3 времени разворота (ЗВР), блок 4 датчиков угловых скоростей (БДУС), бесплатформенную инерциальную навигационную систему 5 (БИНС), блок 6 определения параметров разворота (БОПР), блок 7 определения требуемой угловой скорости (БОТУС), блок 8 определения моментов управления (БОМУ).
В БИНС 5 по информации об угловой скорости  и начальному угловому положению Lн определяется в процессе интегрирования фактическое угловое положение Λ(t) которое при сравнении с требуемым конечным угловым положением Λк в БОПР 6 дает информацию L(t) о фазе процесса достижения требуемого углового положения. Вид назначенных траекторий движения КА содержит в качестве параметра время разворота Тк, информация о котором берется с ЗВР 3. По кватерниону разворота L относительно достижения цели управления Λк и по информации об угловой скорости
и начальному угловому положению Lн определяется в процессе интегрирования фактическое угловое положение Λ(t) которое при сравнении с требуемым конечным угловым положением Λк в БОПР 6 дает информацию L(t) о фазе процесса достижения требуемого углового положения. Вид назначенных траекторий движения КА содержит в качестве параметра время разворота Тк, информация о котором берется с ЗВР 3. По кватерниону разворота L относительно достижения цели управления Λк и по информации об угловой скорости  определяется желаемое изменение кватерниона L и, соответственно, определяется требуемая угловая скорость
определяется желаемое изменение кватерниона L и, соответственно, определяется требуемая угловая скорость  для того, чтобы вращение КА проходило по назначенной траектории. Управляющие моменты определяются БОМУ 8 путем отслеживания требуемой угловой скорости с высокой точностью.
для того, чтобы вращение КА проходило по назначенной траектории. Управляющие моменты определяются БОМУ 8 путем отслеживания требуемой угловой скорости с высокой точностью.
При многих достоинствах систем, построенных по принципу управления по ускорению, применительно к управлению пространственным разворотом КА, отмеченная система обладает существенным недостатком назначенные траектории должны задаваться аналитически, а следовательно, движение по ним не обеспечивает минимизацию расхода топлива на реализацию разворота. Более того, не любая назначенная траектория может быть реализована фактически в силу ограниченности управляющих моментов  возможностями системы исполнительных органов:
возможностями системы исполнительных органов: 
Ближайшим по технической сущности аналогом является способ управления разворотом динамически симметричного КА [2] включающий определение параметров разворота, формирование и с заданного момента приложение к космическому аппарату разгонного импульса, по окончании участка свободного движения формирование и приложение тормозного импульса.
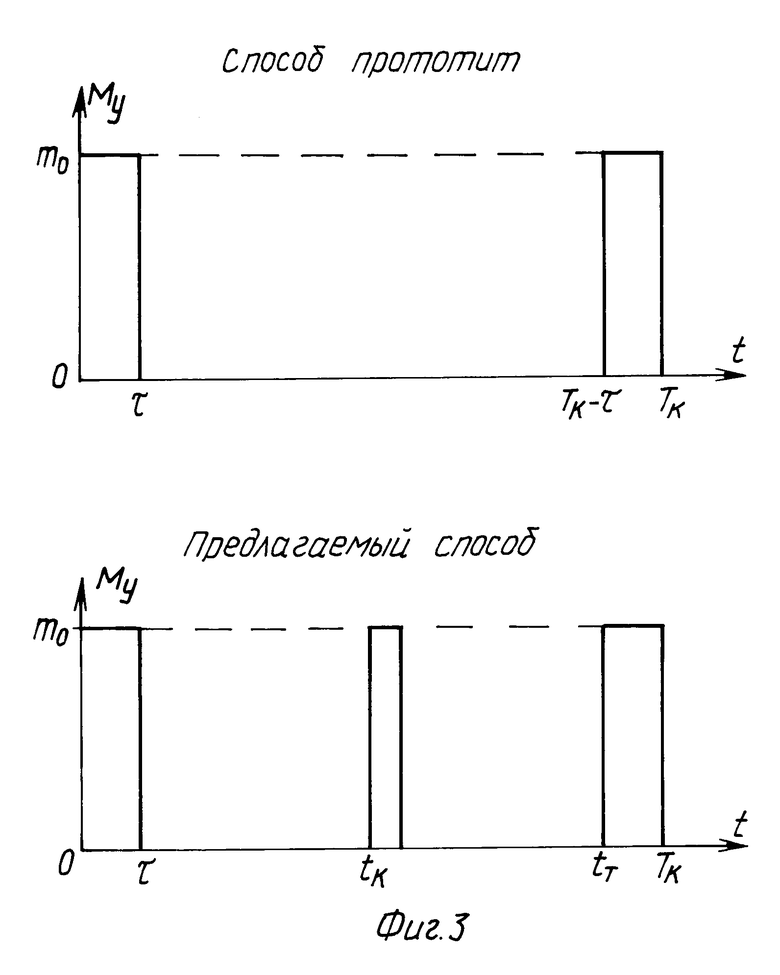
В этом способе разворота предполагается, что КА совершает регулярную процессию вокруг вектора кинетического момента. Моменты управления формируются таким образом, чтобы кинетический момент динамически симметричного КА сохранял в абсолютном пространстве свое направление неизменным во все время разворота. Движение состоит из участков, где действует максимальный момент mо (участки разгона и торможения КА) и участка свободного движения, на котором управляющий момент отсутствует. Определяющими характеристиками процесса разворота являются время разгона (торможения) и время начала торможения.
Управляющие моменты формируются на участках разгона и торможения по выражению
где вектор разворота (направление кинетического момента в инерциальном базисе).
вектор разворота (направление кинетического момента в инерциальном базисе).
Λн кватернион начального положения относительно инерциального базиса.
Λ кватернион текущего положения относительно инерциального базиса.
Знак "+" соответствует участку разгона, а знак "-" участку торможения. Направление разворота  однозначно определяется кватернионом разворота
однозначно определяется кватернионом разворота  .
.
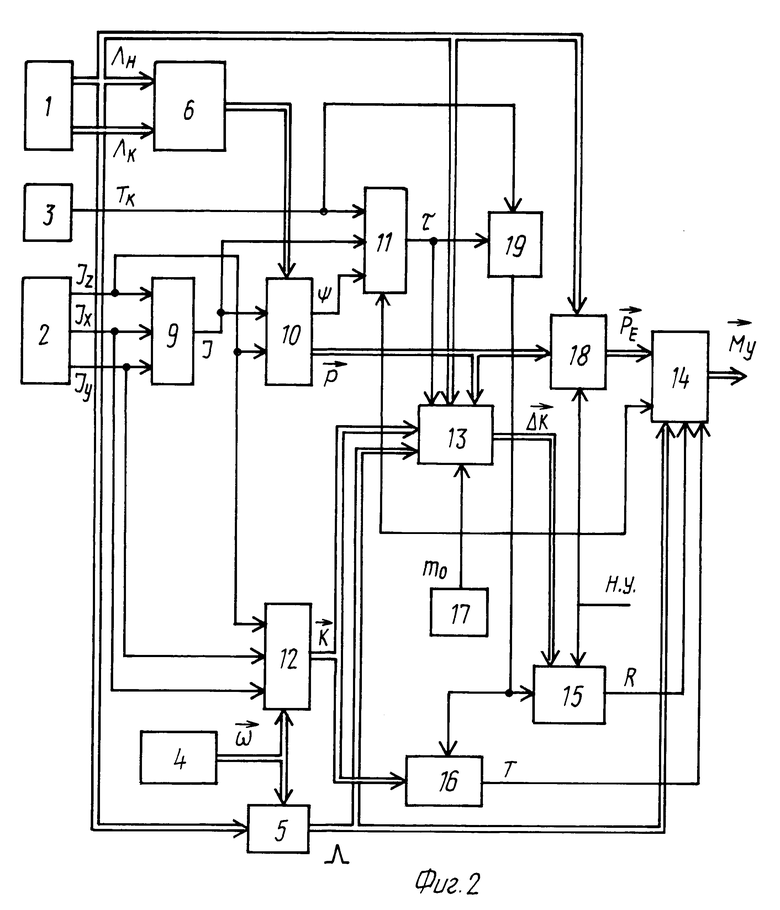
Функциональная структурная схема системы-прототипа, описанная в указанном выше источнике, содержит (фиг.2): блок 1 задатчиков начального и конечного положений аппарата (БЗНКП), блок 2 задатчиков моментов инерции аппарата (БЗМИ), задатчик 3 времени разворота (ЗВР), блок 4 датчика угловых скоростей (БДУС), бесплатформенную инерциальную навигационную систему 5 (БИНС), блок 6 определения параметров разворота (БОПР), блок 9 определения момента инерции аппарата вокруг поперечной оси (БОМИПО), блок 10 определения направления разворота (БОНР), блок 11 определения времени разгона (торможения) (БОВРТ), блок 12 определения кинетического момента аппарата (БОКМ), блок 13 определения отклонения кинетического момента от расчетного (БООКМ), блок 14 формирования управляющего момента (БФУМ), блок 15 формирования команды на разгон (БФКР), блок 16 формирования команды на торможение (БФКТ), задатчик 17 максимальной величины управляющего момента (ЗМВУМ), блок 18 определения вектора разворота (БОВР), блок 19 формирования сигнала об окончании участка свободного движения (БФСОСД), при этом выход задания параметров начального углового положения БЗНКП (1) связан с входом ввода параметров начального углового положения БОПР (6) и с входом ввода начальных условий БИНС (5), выход задания параметров конечного углового положения БЗНКП (1) связан с входом ввода параметров конечного углового положения БОПР (6), первый выход задания моментов инерции вокруг поперечной оси ВЗМИ (2) связан с первым входом БОМИПО (9) и с первым входом ввода моментов инерции БОКМ (12), второй выход задания моментов инерции вокруг поперечной оси БЗМИ (2) связан с вторым входом БОМИПО (9) и с вторым входом ввода моментов инерции БОКМ (12), выход задания момента инерции вокруг продольной оси БЗМИ (2) связан с третьим входом БОМИПО (9), с входом ввода момента инерции вокруг продольной оси БОНР (10) и с третьим входом ввода моментов инерции БОКМ (12), выход БДУС (4) связан с входом ввода вектора угловой скорости БИНС (5) и с входом ввода угловой скорости БОКМ (12), выход БИНС (5) связан с входом ввода текущего углового положения БООКМ (13) и с входом задания углового положения БФУМ (14), выход БОМИПО (9) связан с входом ввода момента инерции вокруг поперечной оси БОНР (10) и с входом ввода момента инерции БОВРТ (11), выход БОВРТ (11) связан с входом задания времени разгона БООКМ (13), выход БОКМ (12) связан с входом ввода кинетического момента БООКМ (13) и с информационным входом БФКТ (16), выход БООКМ (13) связан с информационным входом БФКР (15), выход БФКР (15) связан с первым логическим входом БФУМ (14), выход БФКТ (16) связан с вторым логическим входом БФУМ (14), выход ЗМВУМ (17) связан с входом ввода максимального момента управления БОВРТ (11), с входом ввода величины потребного момента управления БООКМ (13) и с входом задания величины момента управления БФУМ (14).
По начальному Λн и конечному Λк положениям БОПР 6 определяет кватернион разворота Λp по выражению  Одновременно БОМИПО (9) вычисляет, по известным моментам инерции КА: Jx, Jy, Jz в связанных осях, величину
Одновременно БОМИПО (9) вычисляет, по известным моментам инерции КА: Jx, Jy, Jz в связанных осях, величину
Далее в БОНР (10) определяется направление расчетного кинетического момента  в связанных осях (направление разворота) и угол разворота ψ По времени разворота Тк, углу разворота j и моменту инерции вокруг поперечной оси J БОВРТ (11) определяется время разгона (торможения) t по формуле:
в связанных осях (направление разворота) и угол разворота ψ По времени разворота Тк, углу разворота j и моменту инерции вокруг поперечной оси J БОВРТ (11) определяется время разгона (торможения) t по формуле:
В БОВРТ 18 вычисляется вектор разворота  согласно выражению:
согласно выражению:
Вектор  неподвижен в инерциальной системе координат. По информации БИНС (5) Λ определяется направление требуемого кинетического момента
неподвижен в инерциальной системе координат. По информации БИНС (5) Λ определяется направление требуемого кинетического момента  в связанной системе координат.
в связанной системе координат.
С момента поступления команды на разворот tраз "I" БФКР (15) формирует сигнал набора требуемого кинетического момента R "I", и к КА прикладывается управляющий момент (разгонный импульс), сформированный в БФМУ (14). По угловой скорости  определяемой БДУС (4), и моментам инерции КА в БОКМ (12) вычисляется фактический кинетический момент:
определяемой БДУС (4), и моментам инерции КА в БОКМ (12) вычисляется фактический кинетический момент:  В БООКМ (13) вычисляется рассогласование
В БООКМ (13) вычисляется рассогласование  . Управляющий момент прикладывается до тех пор, пока
. Управляющий момент прикладывается до тех пор, пока  В момент времени, когда
В момент времени, когда  начинается участок свободного движения, на котором управляющий момент отсутствует. Через время tт= Tк- τ с начала разворота на выходе БФСОСД (19) появляется сигнал начала торможения, БФКТ (16) выдает команду: Т "I", по которой БФУМ (14) формирует и прикладывает к КА управляющий момент
начинается участок свободного движения, на котором управляющий момент отсутствует. Через время tт= Tк- τ с начала разворота на выходе БФСОСД (19) появляется сигнал начала торможения, БФКТ (16) выдает команду: Т "I", по которой БФУМ (14) формирует и прикладывает к КА управляющий момент  (тормозной импульс; Т "I"). В момент времени, когда
(тормозной импульс; Т "I"). В момент времени, когда  БФКТ (16) снимает команду на торможение: Т "0", разворот КА будет завершен, и управляющие моменты отсутствуют. Система готова к следующему развороту.
БФКТ (16) снимает команду на торможение: Т "0", разворот КА будет завершен, и управляющие моменты отсутствуют. Система готова к следующему развороту.
Недостатком способа и системы-прототипа является низкая точность разворота в случае несимметричного КА и при разворотах на большие углы, так как определение вектора разворота  не учитывает действия динамических эффектов и внешних возмущающих моментов, которые имеют место при реальных программных разворотах КА.
не учитывает действия динамических эффектов и внешних возмущающих моментов, которые имеют место при реальных программных разворотах КА.
Техническим результатом данного изобретения является существенное повышение точности приведения фактически несимметричного КА в требуемое угловое положение при относительно низких затратах топлива.
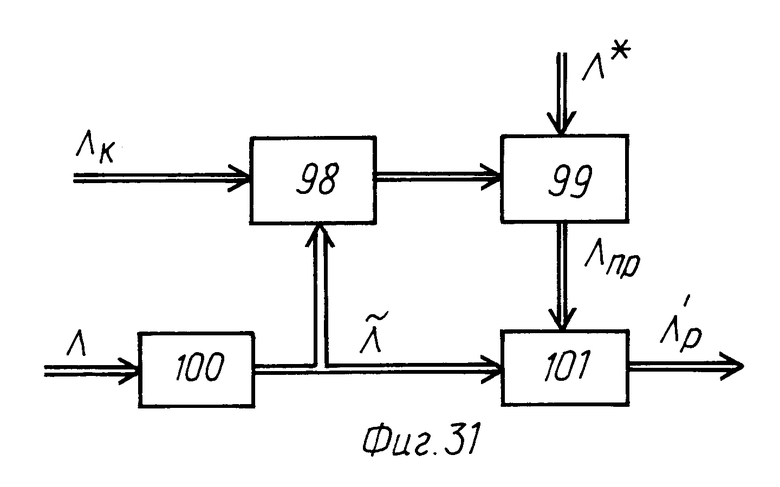
Указанный технический результат достигается тем, что в предлагаемом способе управления разворотом КА, включающем определение параметров разворота, формирование и с заданного момента приложение к космическому аппарату разгонного импульса, по окончании участка свободного движения формирование и приложение тормозного импульса, измеряют углы разворота вокруг оси эквивалентного вращения между теаущим и начальным (νн) угловыми положениями и между текущим и конечным (νк) угловыми положениями, сравнивают их, в момент выполнения равенства νн= νк фиксируют текущее угловое положение, сравнивают его с прогнозируемым угловым положением, соответствующим положению космического аппарата в момент равенства ν
где
Λк кватернион заданного конечного углового положения космического аппарата;
Λ* кватернион прогнозируемого углового положения космического аппарата;
L кватернион текущего углового положения космического аппарата;
Lпр кватернион прицелочного положения космического аппарата, затем определяют вектор кинетического момента  требуемого для приведения космического аппарата при свободном его вращении в прицелочное положение, и прикладывают к космическому аппарату управляющий момент, определяемый выражением
требуемого для приведения космического аппарата при свободном его вращении в прицелочное положение, и прикладывают к космическому аппарату управляющий момент, определяемый выражением
до тех пор, пока 
где фактический кинетический момент космического аппарата;
фактический кинетический момент космического аппарата; требуемый кинетический момент;
требуемый кинетический момент;
mo максимальная величина управляющего момента,
с момента равенства фактического кинетического момента  требуемому
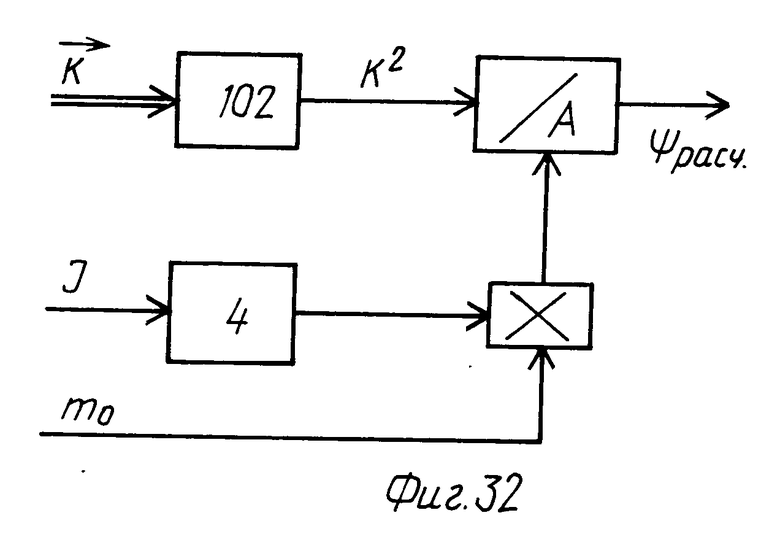
требуемому  измеряют угол разворота вокруг оси эквивалентного вращения от текущего к конечному угловому положению νк определяют значение угла доворота ψдов производимого при торможении космического аппарата, по выражению
измеряют угол разворота вокруг оси эквивалентного вращения от текущего к конечному угловому положению νк определяют значение угла доворота ψдов производимого при торможении космического аппарата, по выражению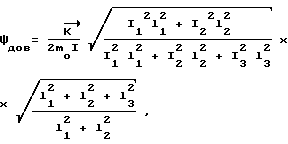
где
I1, I2, I3 моменты инерции КА относительно его связанных осей: x, y, z;
I моменты инерции КА вокруг поперечной оси;
l1, l2, l3 компоненты кватерниона доворота:
в момент равенства νк = ψдов определяют направление тормозного импульса и прикладывают к космическому аппарату управляющий момент в этом направлении.
При этом в способе предлагается с момента равенства фактического кинетического момента  требуемому
требуемому  непрерывно определять параметры доворота
непрерывно определять параметры доворота  определять кинетический момент доворота в проекциях на связанные оси аппарата:
определять кинетический момент доворота в проекциях на связанные оси аппарата:
определять угол доворота, производимого космическим аппаратом при торможении, по выражению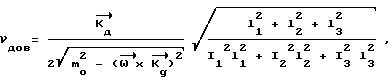
где вектор угловой скорости космического аппарата, измерять угол разворота вокруг оси эквивалентного вращения от текущего к конечному угловому положению nк в момент равенства
вектор угловой скорости космического аппарата, измерять угол разворота вокруг оси эквивалентного вращения от текущего к конечному угловому положению nк в момент равенства
к космическому аппарату прикладывать корректирующий момент до достижения равенства  с момента выполнения условия νк = νдов к космическому аппарату прикладывать управляющий момент
с момента выполнения условия νк = νдов к космическому аппарату прикладывать управляющий момент до полной остановки космического аппарата.
до полной остановки космического аппарата.
Указанный технический результат достигается также тем, что в систему управления разворотом КА, содержащую блок задатчиков начального и конечного положений аппарата, блок задатчиков моментов инерции аппарата, задатчик времени разворота, блок датчиков угловых скоростей, бесплатформенную инерциальную навигационную систему, блок определения параметров разворота, блок определения момента инерции аппарата вокруг поперечной оси, блок определения направления разворота, блок определения времени разгона-торможения, блок определения кинетического момента аппарата, блок определения отклонения кинетического момента от расчетного, блок формирования управляющего момента, блок формирования команды на разгон, блок формирования команды на торможение, задатчик максимальной величины управляющего момента, при этом выход задания параметров начального углового положения блока задатчиков начального и конечного положений аппарата связан с входом ввода параметров начального углового положения блока определения параметров разворота и с входом ввода начальных условий бесплатформенной инерциальной навигационной системы, выход задания параметров конечного углового положения блока задатчиков начального и конечного положений аппарата связан с входом ввода параметров конечного углового положения блока определения параметров разворота, первый выход задания моментов инерции вокруг поперечной оси блока задатчиков моментов инерции аппарата связан с первым входом блока определения момента инерции аппарата вокруг поперечной оси и с первым входом ввода моментов инерции блока определения кинетического момента аппарата, второй выход задания моментов инерции вокруг поперечной оси блока задатчиков моментов инерции аппарата связан с вторым входом блока определения момента инерции аппарата вокруг поперечной оси и со вторым входом ввода моментов инерции блока определения кинетического момента аппарата, выход задания момента инерции вокруг продольной оси блока задатчиков моментов инерции аппарата связан с третьим входом блока определения момента инерции аппарата вокруг поперечной оси, с входом ввода момента инерции вокруг продольной оси блока определения направления разворота и с третьим входом ввода моментов инерции блока определения кинетического момента аппарата, выход блока датчиков угловых скоростей связан с входом ввода вектора угловой скорости бесплатформенной инерциальной навигационной системы и с входом ввода угловой скорости блока определения кинетического момента аппарата, выход бесплатформенной инерциальной навигационной системы связан с входом ввода текущего углового положения блока определения отклонения кинетического момента от расчетного и с входом задания углового положения блока формирования управляющего момента, выход блока определения момента инерции аппарата вокруг поперечной оси связан с входом ввода момента инерции вокруг поперечной оси блока определения направления разворота и с входом ввода момента инерции блока определения времени разгона-торможения, выход блока определения времени разгона-торможения связан с входом задания времени разгона блока определения отклонения кинетического момента от расчетного, выход блока определения кинетического момента аппарата связан с входом ввода кинетического момента блока определения отклонения кинетического момента от расчетного и с информационным входом блока формирования команды на торможение, выход блока определения отклонения кинетического момента от расчетного связан с информационным входом блока формирования команды на разгон, выход блока формирования команды на разгон связан с первым логическим входом блока формирования управляющего момента, выход блока формирования команды на торможение связан с вторым логическим входом блока формирования управляющего момента, выход задатчика максимальной величины управляющего момента связан с входом ввода максимального момента управления блока определения времени разгона-торможения, с входом ввода величины потребного момента управления блока определения отклонения кинетического момента от расчетного и с входом задания величины момента управления блока формирования управляющего момента, введены блок коррекции времени разворота, блок коррекции параметров разворота, блок фиксации параметров разворота, блок определения прицелочных параметров, блок обновления параметров разворота, блок определения расчетного углового положения, блок определения угла доворота, производимого при торможении аппарата, блок определения наличия вектора разворота, блок фиксации углового положения аппарата на начало участка свободного движения, блок определения момента выдачи корректирующего импульса, блок определения начала торможения, блок определения направления разгонного и корректирующего импульсов, блок определения направления тормозного импульса, блок определения направления управляющего момента, при этом выход задания параметров начального углового положения блока задатчиков начального и конечного положений аппарата связан с входом ввода начальных условий блока фиксации углового положения аппарата на начало участка свободного движения и входом ввода начального положения блока определения момента выдачи корректирующего импульса, выход задания параметров конечного углового положения блока задатчиков начального и конечного положений аппарата связан с входом ввода требуемого положения блока коррекции параметров разворота и с входом ввода конечного положения блока определения момента выдачи корректирующего импульса, первый выход задания моментов инерции вокруг поперечной оси блока задатчиков моментов инерции аппарата связан с первым входом ввода моментов инерции блока определения расчетного углового положения, второй выход задания моментов инерции вокруг поперечной оси блока задатчиков моментов инерции аппарата связан с вторым входом ввода моментов инерции блока определения расчетного углового положения, выход задания момента инерции вокруг продольной оси блока задатчиков моментов инерции аппарата связан с третьим входом ввода моментов инерции блока определения расчетного углового положения, выход задатчика времени разворота связан с входом блока коррекции времени разворота, выход бесплатформенной инерциальной навигационной системы связан с входом ввода текущего положения блока коррекции параметров разворота, с входом ввода параметров движения блока фиксации углового положения аппарата на начало участка свободного движения, с входом ввода фактического углового положения блока определения момента выдачи корректирующего импульса, с входами ввода углового положения блока определения направления разгонного и корректирующего импульсов и блока определения направления тормозного импульса, выход блока определения параметров разворота связан с входом ввода начальных условий блока фиксации параметров разворота, выход блока определения момента инерции аппарата вокруг поперечной оси связан с входом задания усредненного момента инерции блока определения расчетного углового положения и с входом ввода момента инерции блока определения угла доворота, производимого при торможении аппарата, выход задания вектора разворота блока определения направления разворота связан с входом ввода вектора разворота блока определения расчетного углового положения, выход задания угла разворота блока определения направления разворота связан с входом ввода угла разворота блока определения расчетного углового положения, выход блока определения кинетического момента аппарата связан с входом ввода параметров движения блока определения угла доворота, производимого при торможении аппарата, и с входом ввода кинетического момента блока определения направления тормозного импульса, выходы блока определения отклонения кинетического момента от расчетного связан с входом ввода рассогласования блока определения направления разгонного и корректирующего импульсов, выход блока формирования команды на разгон связан с логическим входом блока определения направления разгонного и корректирующего импульсов и с первым стробирующим входом блока определения направления управляющего момента, выход блока формирования команды на торможение связан с логическим входом блока определения направления тормозного импульса и с вторым стробирующим входом блока определения направления управляющего момента, выход задатчика максимальной величины управляющего момента связан с входом ввода величины момента управления блока определения угла доворота, производимого при торможении аппарата, выход блока коррекции времени разворота связан с входами ввода времени разворота блока определения времени разгона-торможения и блока определения расчетного углового положения, выход блока коррекции параметров разворота связан с входом ввода новых параметров блока фиксации параметров разворота, выход блока фиксации параметров разворота связан с первым входом блока определения прицелочных параметров и с входом ввода начальных условий блока обновления параметров разворота, выход блока определения прицелочных параметров связан с входами ввода требуемого углового положения блока обновления параметров разворота и блока определения расчетного углового положения, выход блока обновления параметров разворота связан с информационным входом блока определения направления разворота, выход задания угла разворота блока определения расчетного углового положения связан с входом ввода угла разворота блока определения времени разгона-торможения, выход задания вектора разворота блока определения расчетного углового положения связан с входом ввода вектора разворота блока определения отклонения кинетического момента от расчетного и с входом блока определения наличия вектора разворота, выход задания расчетного положения блока определения расчетного углового положения связан с входом ввода расчетных параметров блока коррекции параметров разворота, логический выход блока определения расчетного углового положения связан со стробирующим входом блока обновления параметров разворота, выход задания углового положения по прогнозу блока определения расчетного углового положения связан с входом ввода прогнозируемого положения блока обновления параметров разворота, выход блока определения угла доворота, производимого при торможении аппарата, связан с первым входом блока определения начала торможения, выход блока определения наличия вектора разворота связан с входом разрешения блока формирования команды на разгон, выход блока фиксации углового положения аппарата на начало участка свободного движения связан с входом ввода начальных условий блока определения отклонения кинетического момента от расчетного, с вторым входом блока определения прицелочных параметров и с входом ввода начального положения блока определения расчетного углового положения, логический выход блока определения момента выдачи корректирующего импульса связан со стробирующим входом блока формирования команды на разгон, с управляющими входами блока фиксации параметров разворота и блока фиксации углового положения аппарата на начало участка свободного движения, информационный выход блока определения момента выдачи корректирующего импульса связан с вторым входом блока определения начала торможения, выход блока определения начала торможения связан с логическим входом блока формирования команды на разгон и с логическим входом блока формирования команды на торможение, выход блока определения направления разгонного и корректирующего импульсов связан с первым информационным входом блока определения направления управляющего момента, выход блока определения направления тормозного импульса связан с вторым информационным входом блока определения направления управляющего момента, выход блока определения направления управляющего момента связан с входом ввода направления разворота блока формирования управляющего момента.
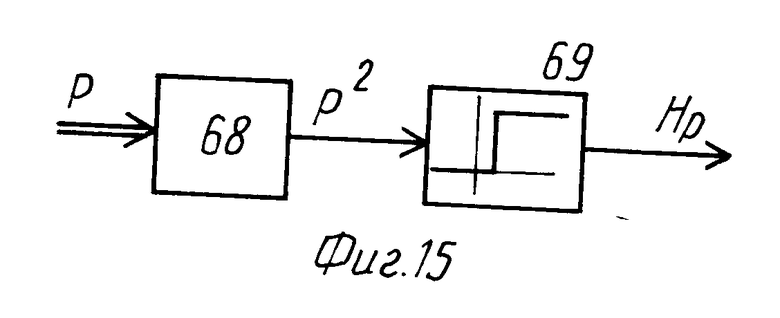
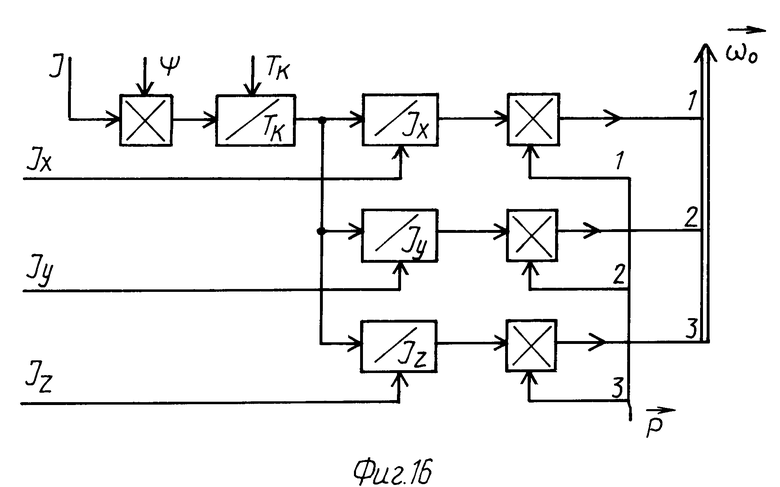
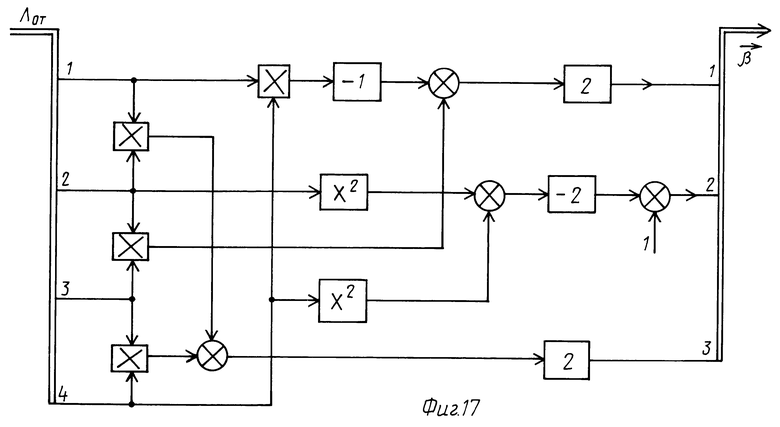
На фиг. 1 изображена функциональная схема системы-аналога; на фиг. 2 - функциональная схема системы-прототипа; на фиг. 3 временные диаграммы для системы-прототипа и предлагаемой системы; на фиг. 4 функциональная схема предлагаемой системы; на фиг. 5 схема реализации БОПР 6; на фиг. 6 схема определения обратного кватерниона; на фиг. 7 схема умножения кватернионов; на фиг. 8 схема реализации БОМИПО 9; на фиг. 9 схема реализации БОНР 10; на фиг. 10 схема определения Φ, Ω, α33 (реализация блока 42); на фиг. 11 схема реализации блоков 45, 46; на фиг. 12 схема реализации блока 44; на фиг. 13 - схема реализации БОРУП 25; на фиг. 14 схема возведения вектора в квадрат; на фиг. 15 схема реализации БОНВР 27 и блока 48; на фиг. 16 схема формирования начальной угловой скорости  на фиг. 17 схема определения направления на землю в связанных осях
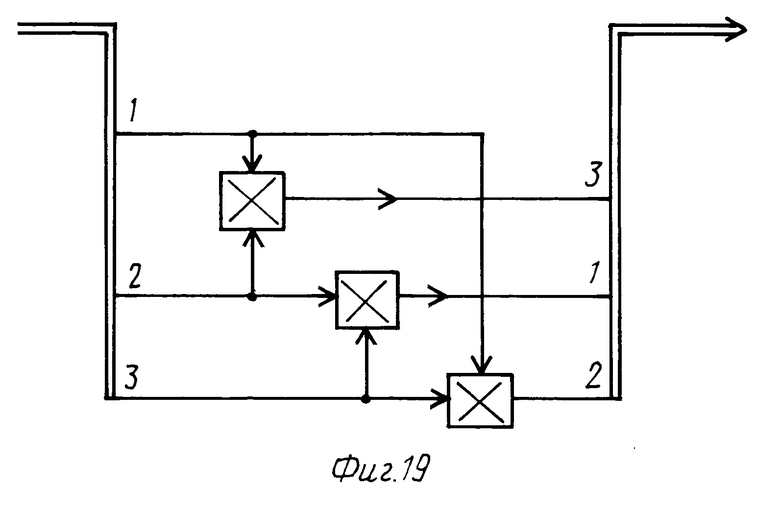
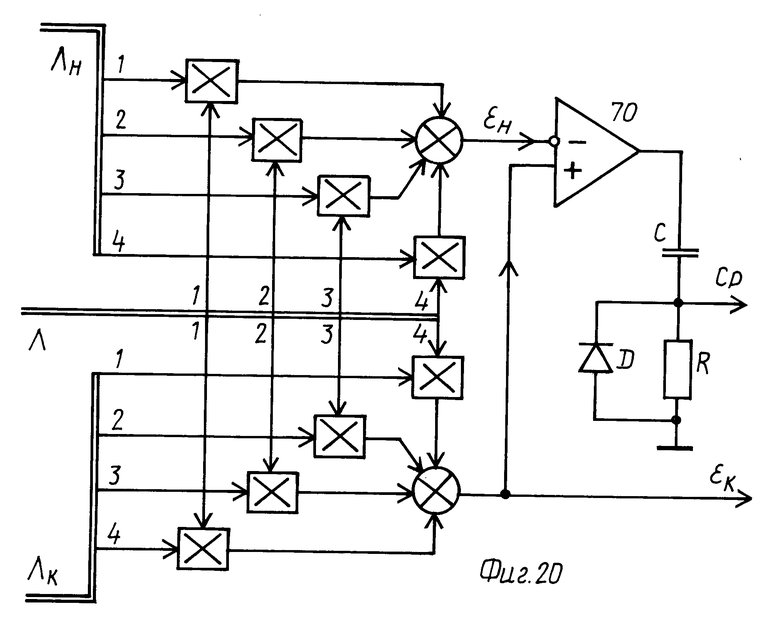
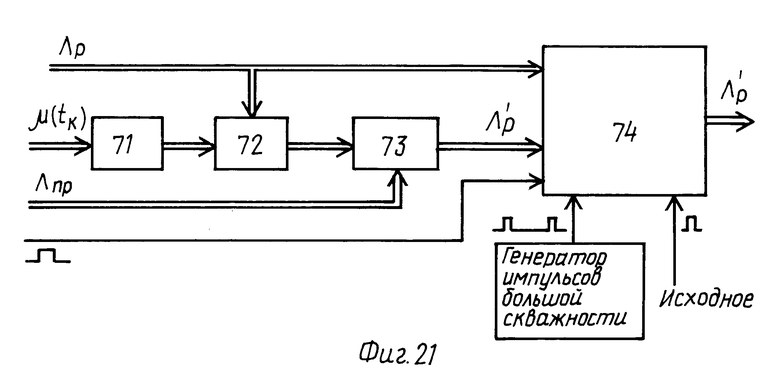
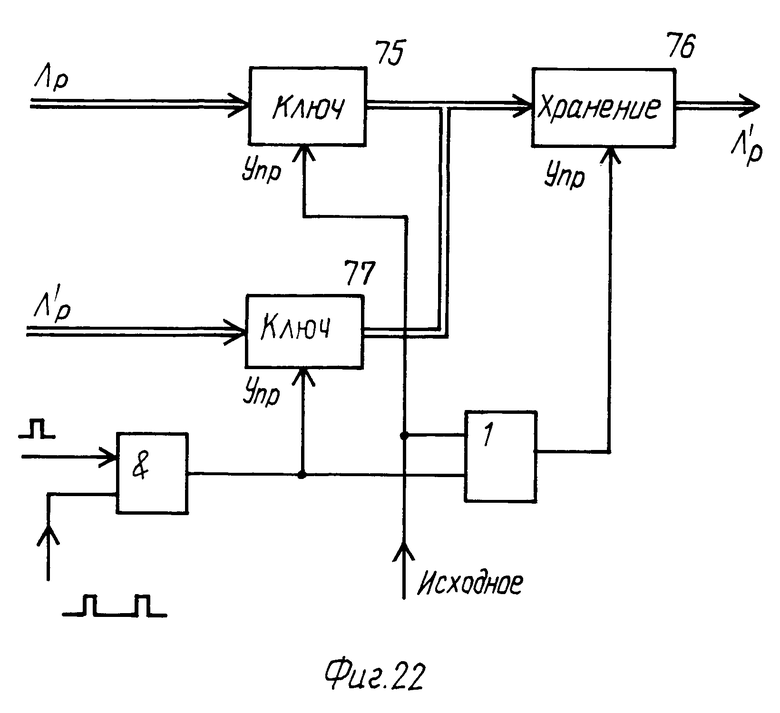
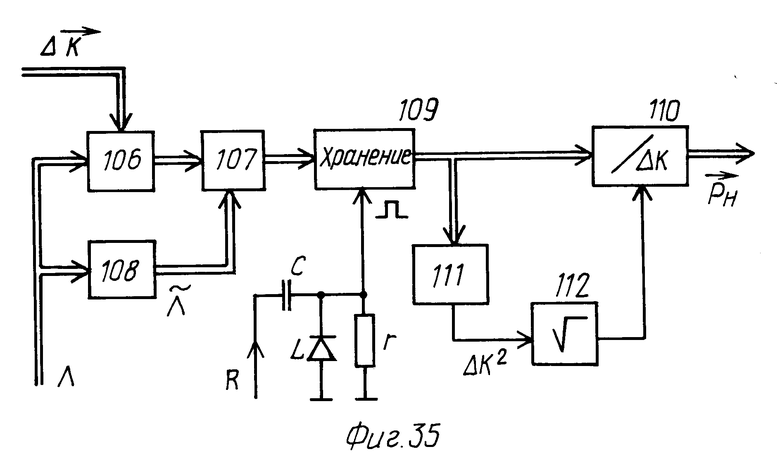
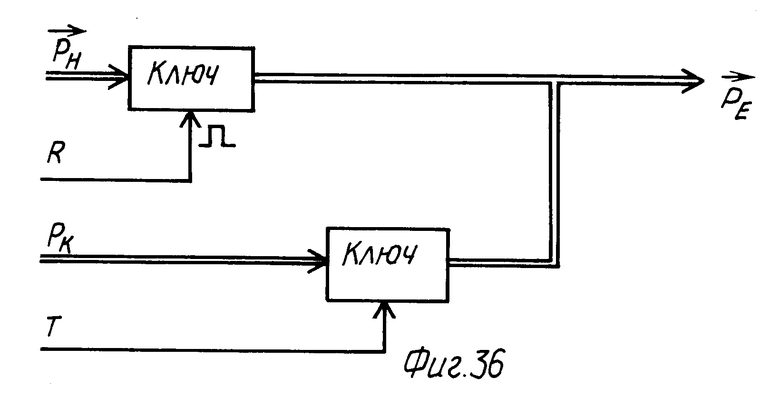
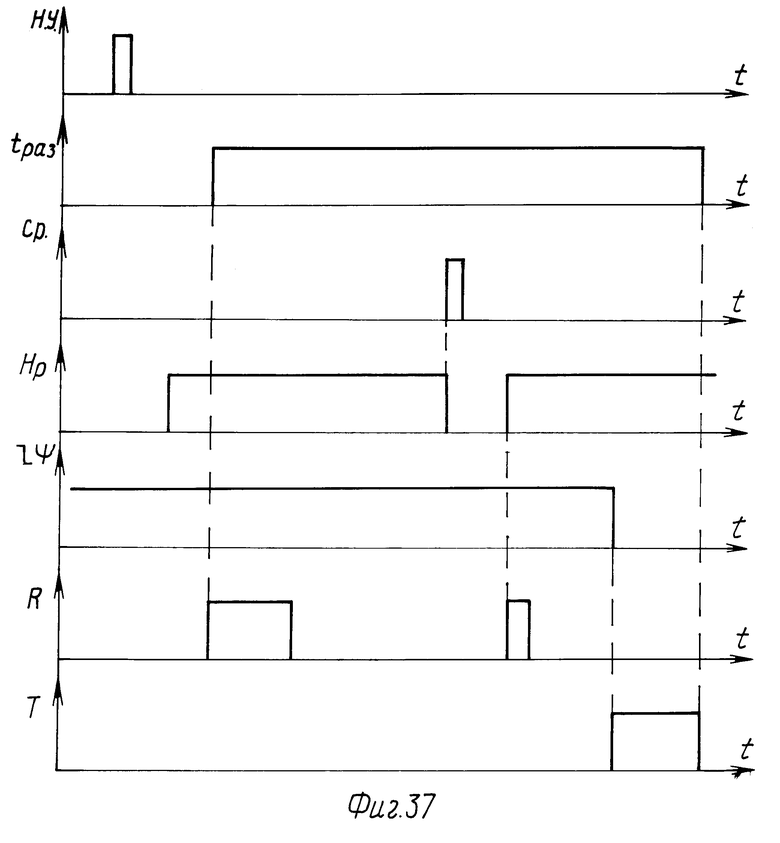
на фиг. 17 схема определения направления на землю в связанных осях  на фиг. 19 схема реализации блоков 52, 55; на фиг. 20 схема реализации БОМВКИ 29 и блока 56; на фиг. 21 схема реализации БО6ПР 26; на фиг. 22 схема реализации блока 74; на фиг. 23 схема реализации БОВРТ 11; на фиг. 24 схема реализации БОКМ 12; на фиг. 25 схема реализации БООКМ 13; на фиг. 26 схема умножения вектора на скаляр; на фиг. 27 схема реализации блока 81; на фиг. 28 схема реализации БФУМ 14; на фиг. 29 схема реализации БФКР 15; на фиг. 30 схема реализации БФКТ 16; на фиг. 31 схема реализации БКПР 21; на фиг. 32 схема реализации БОУД 26; на фиг. 33 схема реализации БФПР 22 и БФУПН 28; на фиг. 34 схема реализации БОНТ 30; на фиг. 35 схема реализации БОНРКИ 31 и ВОНТИ 32; на фиг. 36 схема реализации БОНУМ 33; на фиг. 37 циклограмма процесса разворота КА.
на фиг. 19 схема реализации блоков 52, 55; на фиг. 20 схема реализации БОМВКИ 29 и блока 56; на фиг. 21 схема реализации БО6ПР 26; на фиг. 22 схема реализации блока 74; на фиг. 23 схема реализации БОВРТ 11; на фиг. 24 схема реализации БОКМ 12; на фиг. 25 схема реализации БООКМ 13; на фиг. 26 схема умножения вектора на скаляр; на фиг. 27 схема реализации блока 81; на фиг. 28 схема реализации БФУМ 14; на фиг. 29 схема реализации БФКР 15; на фиг. 30 схема реализации БФКТ 16; на фиг. 31 схема реализации БКПР 21; на фиг. 32 схема реализации БОУД 26; на фиг. 33 схема реализации БФПР 22 и БФУПН 28; на фиг. 34 схема реализации БОНТ 30; на фиг. 35 схема реализации БОНРКИ 31 и ВОНТИ 32; на фиг. 36 схема реализации БОНУМ 33; на фиг. 37 циклограмма процесса разворота КА.
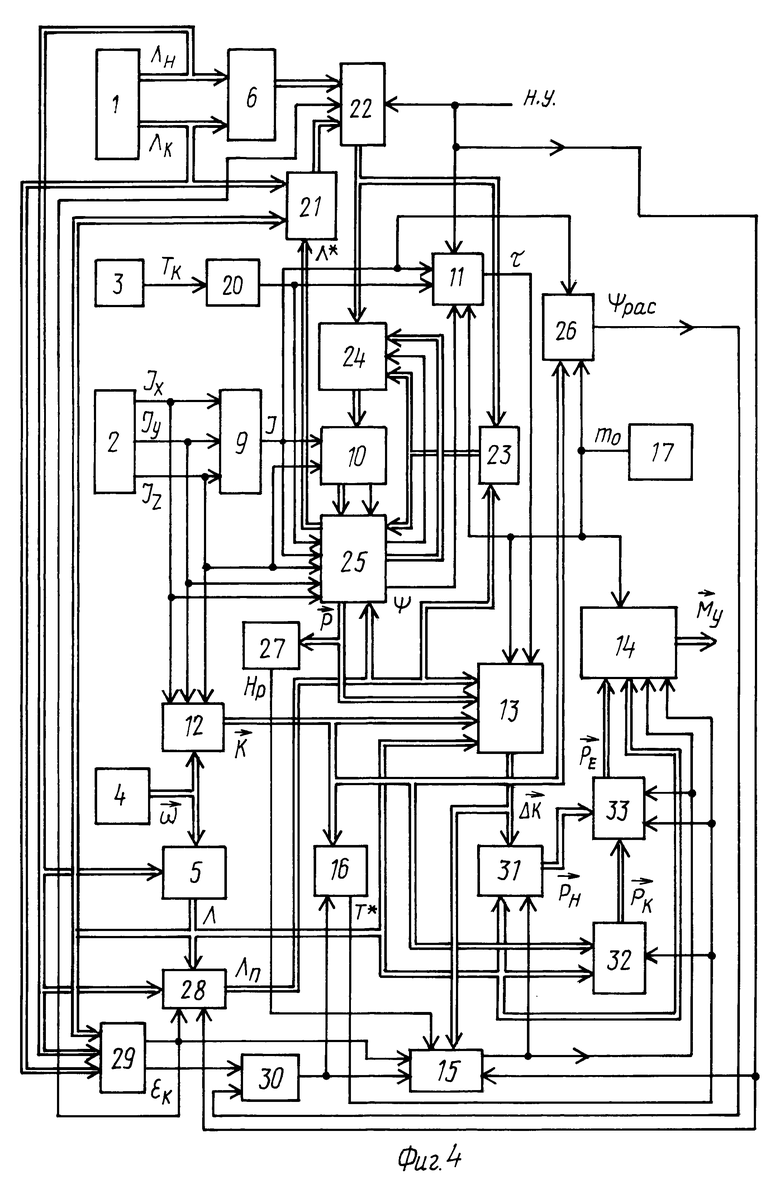
Пример реализации предлагаемых способа и системы представлен на фиг.4, где обозначено: 1 блок задатчиков начального и конечного положений аппарата (БЗНКП), 2 блок задатчиков моментов инерции аппарата (БЗМИ), 3 задатчик времени разворота (ЗВР), 4 блок датчиков угловых скоростей (БДУС), 5 - бесплатформенная инерциальная навигационная система (БИНС), 6 блок определения параметров разворота (БОПР), 9 блок определения момента инерции аппарата вокруг поперечной оси (БОМИПО), 10 блок определения направления разворота (БОНР), 11 блок определения времени разгона (торможения) (БОВРТ), 12 блок определения кинетического момента аппарата (БОКМ), 13 блок определения отклонения кинетического момента от расчетного (БООКМ), 14 блок формирования управляющего момента (БФУМ), 15 блок формирования команды на разгон (БФКР), 16 блок формирования команды на торможение (БФКТ), 17 - задатчик максимальной величины управляющего момента (ЗМВУМ), 20 блок коррекции времени разворота (БКВР), 21 блок коррекции параметров разворота (БКПР), 22 блок фиксации параметров разворота (БФПР), 23 блок определения прицелочных параметров (ВОПП), 24 блок обновления параметров разворота (БО6ПР), 25 блок определения расчетного углового положения (БОРУП), 26 - блок определения угла доворота, производимого при торможении аппарата (БОУД), 27 блок определения наличия вектора разворота (БОНВР), 28 блок фиксации углового положения аппарата на начало участка свободного движения (БФУПН), 29 блок определения момента выдачи корректирующего импульсов (БОМВКИ), 30 - блок определения начала торможения (БОНТ), 31 блок определения направления разгонного и корректирующего импульсов (БОНРКИ), 32 блок определения направления тормозного импульса (БОНТИ), 33 блок определения направления управляющего момента (БОНУМ), при этом выход задания параметров начального углового положения ВЗНКП 1 связан с входом ввода начальных условий БФУПН 28 и с входом ввода начального положения БОМВКИ 29, выход задания параметров конечного углового положения БЗНКП 1 связан с входом ввода требуемого положения БКПР 21 и с входом ввода конечного положения БОМВКИ 29, первый выход задания моментов инерции вокруг поперечной оси БЗМИ 2 связан с первым входом ввода моментов инерции БОРУП 25, второй выход задания моментов инерций вокруг поперечной оси БЗМИ 2 связан со вторым входом ввода моментов инерции БОРУП 25, выход задания момента инерции вокруг продольной оси БЗМИ 2 связан с третьим входом ввода моментов инерции БОРУП 25, выход ЗВР 3 связан с входом БКВР 20, выход БИНС 5 связан с входом ввода текущего положения БКПР 21, с входом ввода параметров движения БФУПН 28, с входом ввода фактического углового положения БОМВКИ 29, с входами ввода углового положения БОНР 10 КИ и БОНТ 30 И, выход БОПР 6 связан с входом ввода начальных условий БФПР 22, выход БОМИПО 9 связан с входом задания усредненного момента инерции БОРУП 25 и с входом ввода момента инерции БОУД 26, выход задания вектора разворота БОНР 10 связан с входом ввода вектора разворота БОРУП 25, выход задания угла разворота ВОНР 10 связан с входом вввода угла разворота БОРУП 25, выход БОКМ 12 связан с входом ввода параметров движения БОУД 26 и с водом ввода кинетического момента БОНТ 30 И, выход БООКМ 13 связан с входом ввода рассогласования БОНР 10 КИ, выход БФКР 15 связан с логическим входом БОНР 10 КИ и с первым стробирующим входом БОНУМ 33, выход БФКТ 16 связан с логическим входом БОНТ 30 И и со вторым стробирующим входом БОНУМ 33, выход ЗВР 3 связан с входом ввода величины момента управления БОУД 26, выход БКБР 20 связан с входами ввода времени разворота БОВРТ 11 и БОРУП 25, выход БКПР 21 связан с входом ввода новых параметров БФПР 22, выход БФПР 22 связан с первым входом БОПП 23 и с входом ввода начальных условий БО6ПР 24, выход БОПП 23 связан с входами ввода требуемого углового положения БО6ПР 24 и БОРУП 25, выход БО6ПР 24 связан с информационным входом БОНР 10, выход задания угла разворота БОРУП 25 связан с входом ввода угла разворота БОВРТ 11, выход задания вектора разворота БОВРТ 11, выход задания вектора разворота БОРУП 25 связан с входом вектора разворота БООКМ 13 и с входом БОНВР 27, выход задания расчетного положения БОРУП 25 связан с входом ввода расчетных параметров БКПР 21, логический выход БОРУП 25 связан со стробирующим входом БО6ПР 24, выход задания углового положения по прогнозу БОРУП 25 связан с входом ввода прогнозируемого положения БО6ПР 24, выход БОУД 26 связан с первым входом БОНТ 30, выход БОНВР 27 связан с входом разрешения БФКР 15, выход БФУПН 28 связан с входом ввода начальных условий БООКМ 13, со вторым входом ВОПП 23 и с входом ввода начального положения БОРУП 25, логический выход БОМВКИ 29 связан со стробирующим входом БФКР 15, с управляющими входами БФПР 22 и БФУПН 28, информационный выход БОМВКИ 29 связан с вторым входом БОНТ 30, выход БОНТ 30 связан с логическим входом БФКР 15 и с логическим входом БФКТ 16, выход БОНР 10 КИ связан с первым информационным входом БОНУМ 33, выход БОНТ 30 И связан с вторым информационным входом БОНУМ 33, выход БОНУМ 33 связан с входом ввода направления разворота БФУМ 14.
Реализация отдельных блоков и элементов предлагаемой системы выполнена на интегральных схемах и стандартных аналоговых модулях и представлена на фиг.5-36.
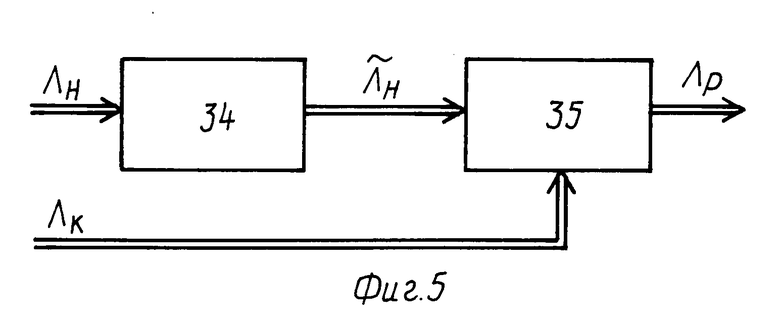
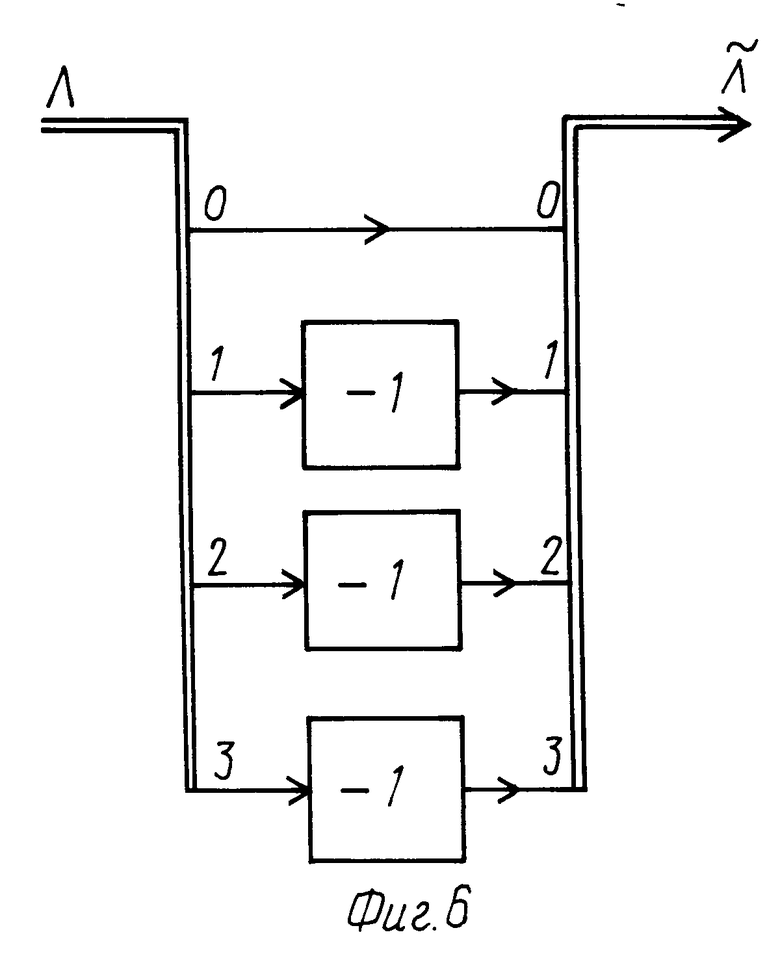
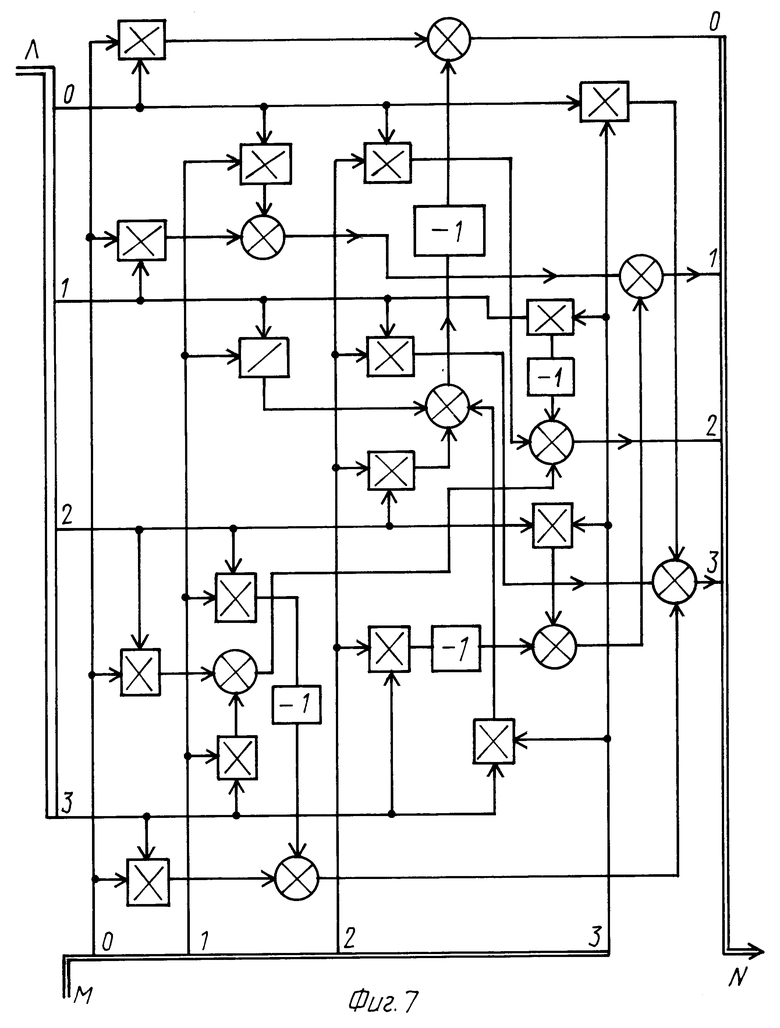
БОПР 6 (фиг.5) вычисляет кватернион разворота по формуле и содержит два субблока: 34 блок определения сопряженного кватерниона (фиг. 6) и 35 блок перемножения кватернионов (фиг.7). Блок определения сопряженного кватерниона состоит из трех инверторов, связывающих соответствующие входы и выходы с 1-го по 3-ий. Нулевой вход напрямую связан с нулевым выходом. Блок перемножения кватернионов имеет два входа и один выход. Если Λ первый вход, М второй вход, N выход, то N = Λ°M.
и содержит два субблока: 34 блок определения сопряженного кватерниона (фиг. 6) и 35 блок перемножения кватернионов (фиг.7). Блок определения сопряженного кватерниона состоит из трех инверторов, связывающих соответствующие входы и выходы с 1-го по 3-ий. Нулевой вход напрямую связан с нулевым выходом. Блок перемножения кватернионов имеет два входа и один выход. Если Λ первый вход, М второй вход, N выход, то N = Λ°M.
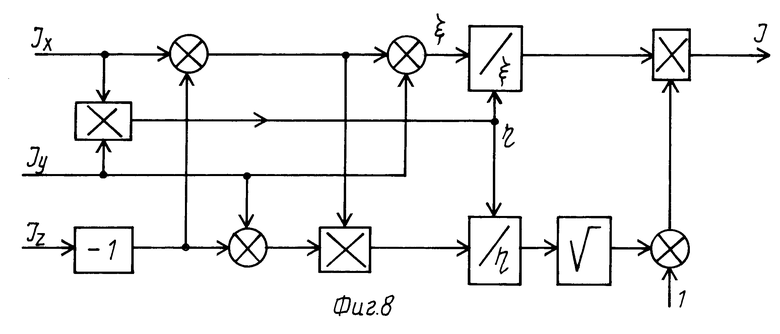
БОМИПО 9 усредняет моменты инерции вокруг поперечных осей, согласно вышеприведенному выражению для момента инерции I (фиг.8).
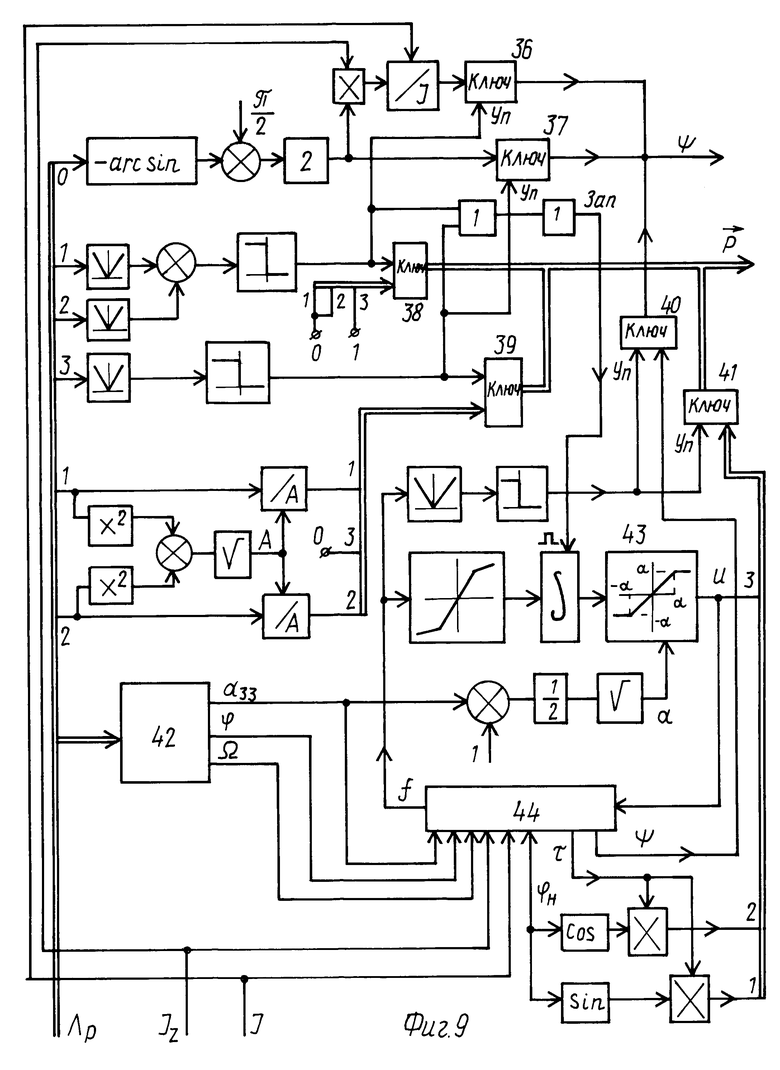
БОНР 10 в зависимости от условий разворота: Λp≡ {Λ
1) разворот вокруг продольной оси: λ
2) разворот вокруг поперечной оси: λ
3) косовой разворот (фиг.9).
Работа БОНР сводится к следующему. Если |λ и угол ψ соответствующие варианту 1.
и угол ψ соответствующие варианту 1.
Соответственно для варианта 2 (ключи 37 и 39). Если оба варианта отсутствуют, то схема логического отрицания формирует сигнал запуска на интегратор для алгоритмического вычисления вектора разворота  и угла ψ.
и угла ψ.
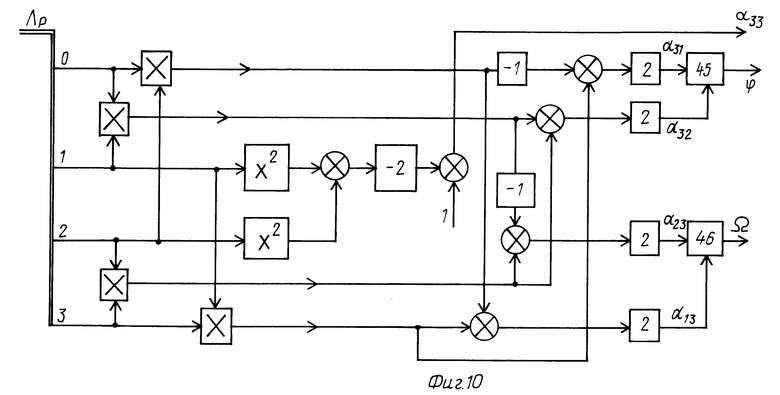
Субблоки 43, 44 и интегратор образуют контур, решающий алгоритмически уравнение f(u) 0, а субблок 42 определяет необходимые константы a33, Φ, Ω - согласно вычислительной схеме фиг.10, причем:
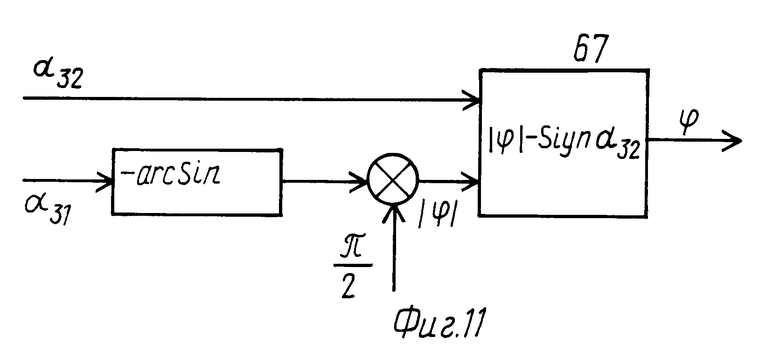
Для определения углов Φ и W может быть применена известная схема умножения переменной на знаковую функцию. Величина угла v определяется вторым входом блока 45 и равна |Φ| = π/2 - arcsinα31 вычисления производятся блоком нелинейной функции и сумматором (фиг.11). Знак угла Φ совпадает со знаком a32 и определяется первым входом блока 45. Подключив выход сумматора к непрерывному входу схемы умножения 67, а первый вход блока 45 к знаковому входу той же схемы, на выходе ее получим требуемое значение интересующего угла.
Субблок 46 работает аналогично, но на его выходе будет значение угла Ω.
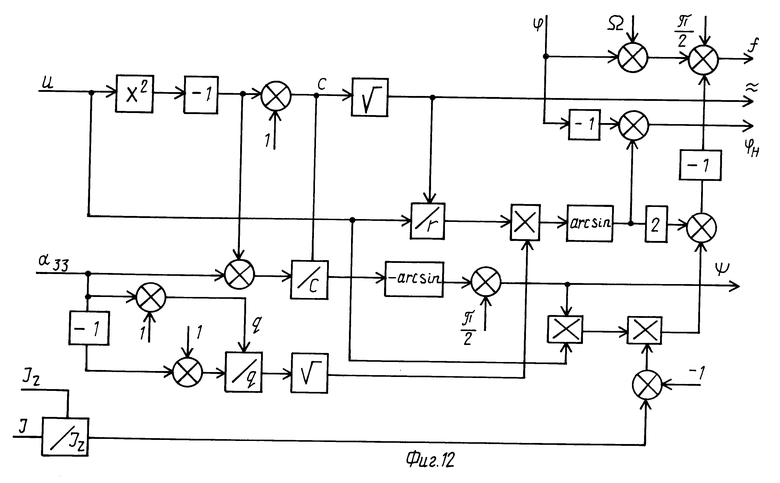
Блок 44 вычисляет собственно функцию f в зависимости от изменяющегося сигнала U ≡ cosθ (фиг.12).
В момент времени, когда f(u) 0; u const (больше не меняется), т.е. решение найдено, компаратор выдает разрешение ключам 40 и 41 на коммутацию выходов  с найденным решением, построенным согласно схеме фиг.12.
с найденным решением, построенным согласно схеме фиг.12.
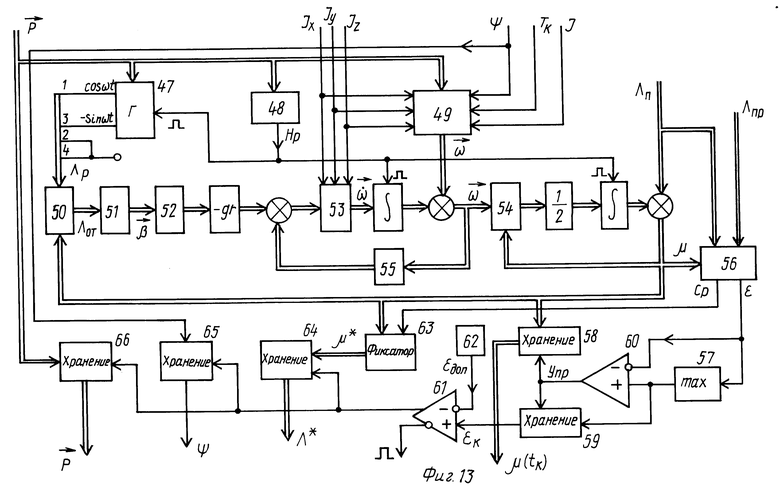
БОРУП 25 реализует математическую модель вращательного движения твердого тела в гравитационном поле Земля (фиг.12). Он содержит определитель наличия ненулевого вектора разворота (блок 48; представлен на фиг. 15), который выдает импульс запуска интеграторов, и генератор гармонических сигналов 47. Начальные условия  определяются начальным положением Λп вектором разворота и инерционными характеристиками, а также углом разворота ψ и временем разворота Тк. Требуемую на начало участка свободного движения угловую скорость определяет блок 49, согласно вычислительной схеме фиг.16.
определяются начальным положением Λп вектором разворота и инерционными характеристиками, а также углом разворота ψ и временем разворота Тк. Требуемую на начало участка свободного движения угловую скорость определяет блок 49, согласно вычислительной схеме фиг.16.
Направление на Землю  определяется блоком 51 по вычислительной схеме фиг. 17, при этом ориентацию связанных с КА осей относительно орбитальной системы координат Lот вычисляет блок 50 по выражению Λот= Λор° μ(t) где μ(t) степень отдаленности моделируемого положения КА (см. ниже).
определяется блоком 51 по вычислительной схеме фиг. 17, при этом ориентацию связанных с КА осей относительно орбитальной системы координат Lот вычисляет блок 50 по выражению Λот= Λор° μ(t) где μ(t) степень отдаленности моделируемого положения КА (см. ниже).
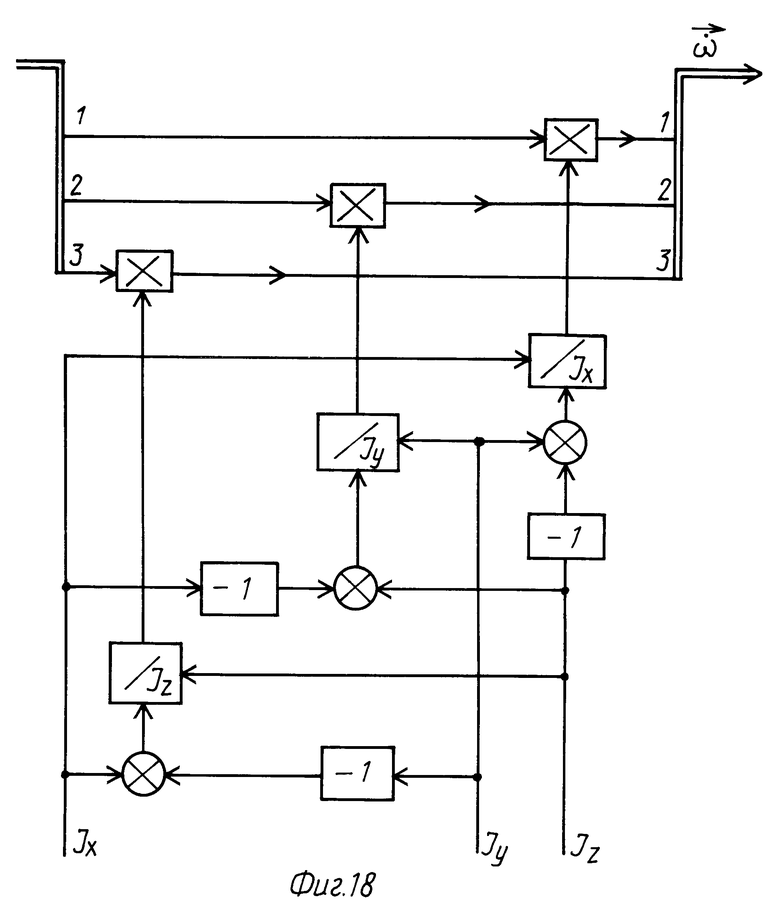
Блоки 53, 55 совместно с интегратором образуют динамический контур математической модели. Блок 54 и второй интегратор моделируют кинематические уравнения. Блоки 52 и 55 необходимы для формирования попарных произведений βjβк, ωjωк(k ≢ j) которые входят в левые части динамических уравнений математической модели (фиг.19). Блок 53 (фиг.18) формирует угловое ускорение  .
.
После интегрирования блоком, с учетом начальных условий  Λo, получим угловую скорость
Λo, получим угловую скорость  .
.
Степень отдаленности моделируемого положения m(t) от конечного Λпр определяется блоком 56 по выражению  (фиг.20). В момент, когда
(фиг.20). В момент, когда  переключается компаратор 70, и на выходе "Cр." появляется импульс, по которому фиксируется промежуточное положение КА по прогнозу μ* Блок 57 есть схема отслеживания максимальной величины e Блоки 57 и 60 совместно формируют управляющий сигнал (логическую единицу) в момент начала спада e В этот момент схемы хранения аналоговых сигналов 58 и 59 фиксируют лучшие значения εк и μ*, μ(Tк). Если точность разворота удовлетворительная: εк ≥ εдоп то компаратор 61 формирует управляющий сигнал на схемы хранения 64, 65, 66 и на аналоговых выходах БОРУП 25 будут расчетные значения
переключается компаратор 70, и на выходе "Cр." появляется импульс, по которому фиксируется промежуточное положение КА по прогнозу μ* Блок 57 есть схема отслеживания максимальной величины e Блоки 57 и 60 совместно формируют управляющий сигнал (логическую единицу) в момент начала спада e В этот момент схемы хранения аналоговых сигналов 58 и 59 фиксируют лучшие значения εк и μ*, μ(Tк). Если точность разворота удовлетворительная: εк ≥ εдоп то компаратор 61 формирует управляющий сигнал на схемы хранения 64, 65, 66 и на аналоговых выходах БОРУП 25 будут расчетные значения  При этом на логическом выходе БОРУП 25 сигнал будет отсутствовать. В противном случае: eк < εдоп указанные значения будут отсутствовать, а сигнал с логического выхода БОРУП разрешает БО6ПРу 24 продолжение цикла интеграций, реализованного блоками 22, 23, 24.
При этом на логическом выходе БОРУП 25 сигнал будет отсутствовать. В противном случае: eк < εдоп указанные значения будут отсутствовать, а сигнал с логического выхода БОРУП разрешает БО6ПРу 24 продолжение цикла интеграций, реализованного блоками 22, 23, 24.
БО6ПР 24 представлен на фиг. 21 и организует интеграционный процесс  причем левую часть вычисляют блоки 71, 72 и 73. Схема 74 обновляет информацию на выходе (фиг.22). В исходном состоянии выход Λ
причем левую часть вычисляют блоки 71, 72 и 73. Схема 74 обновляет информацию на выходе (фиг.22). В исходном состоянии выход Λ
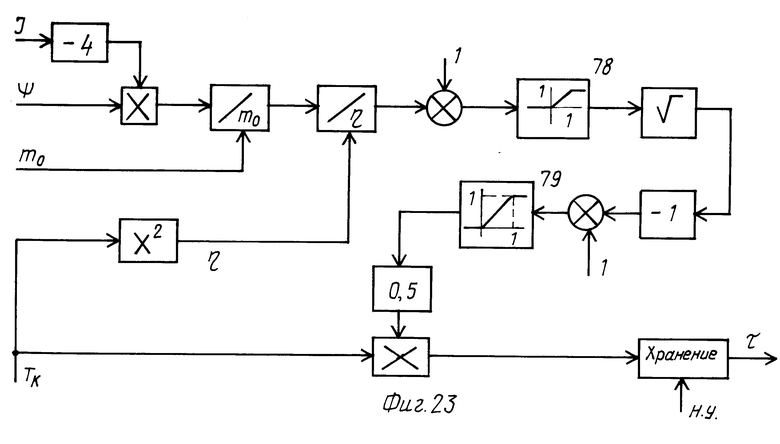
БОВРТ 11 вычисляет время разгона (торможения) τ по вышеуказанному выражению, согласно схеме фиг.23.
Блоки ограничения 78 и 79 необходимы для возможности взятия корня квадратного и для обеспечения условия положительности. По сигналу "н.у." t фиксируется.
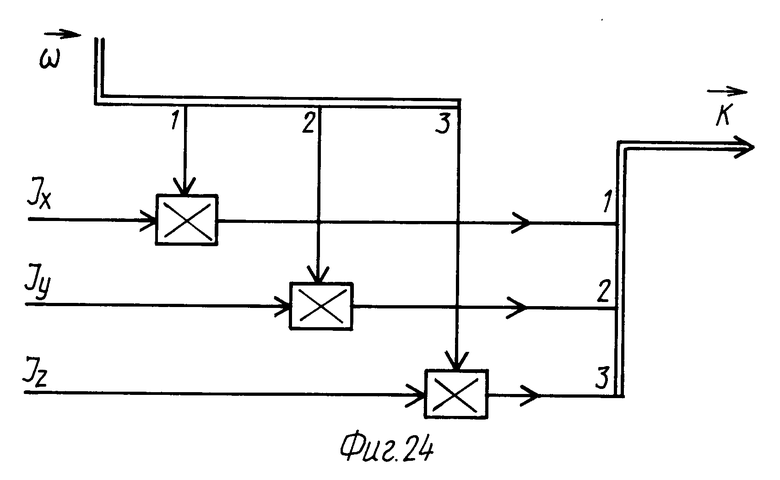
БОКМ 12 представлен на фиг.24 и состоит из трех перемножителей и осуществляет умножение вектора угловой скорости на диагональную матрицу моментов инерции.
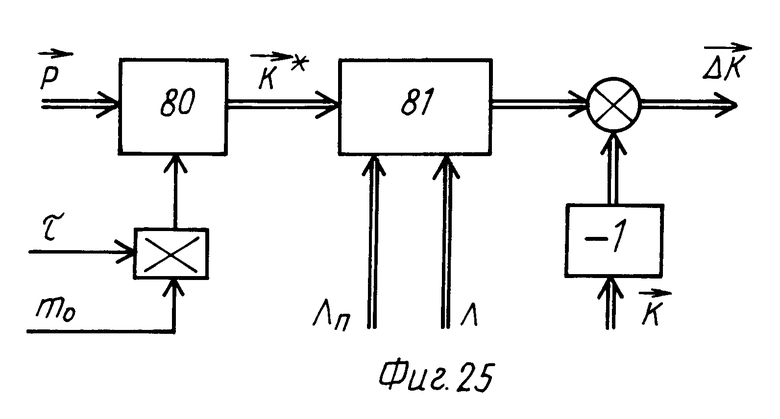
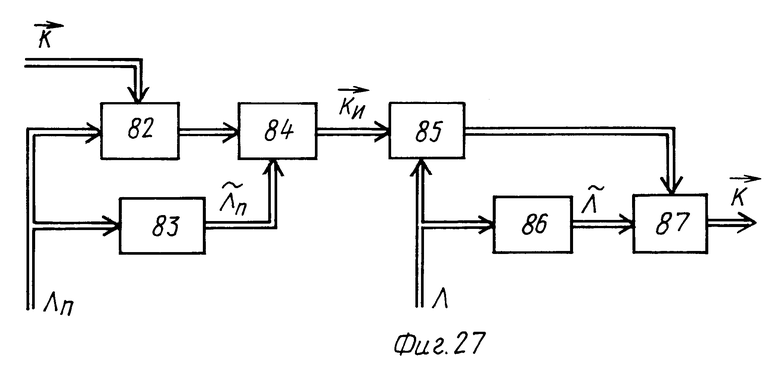
БООКМ 13 представлен на фиг.25 и производит три основные операции - определение требуемого кинетического момента  на момент выдачи управляющего импульса (блок 80), вычисление расчетного кинетического момента
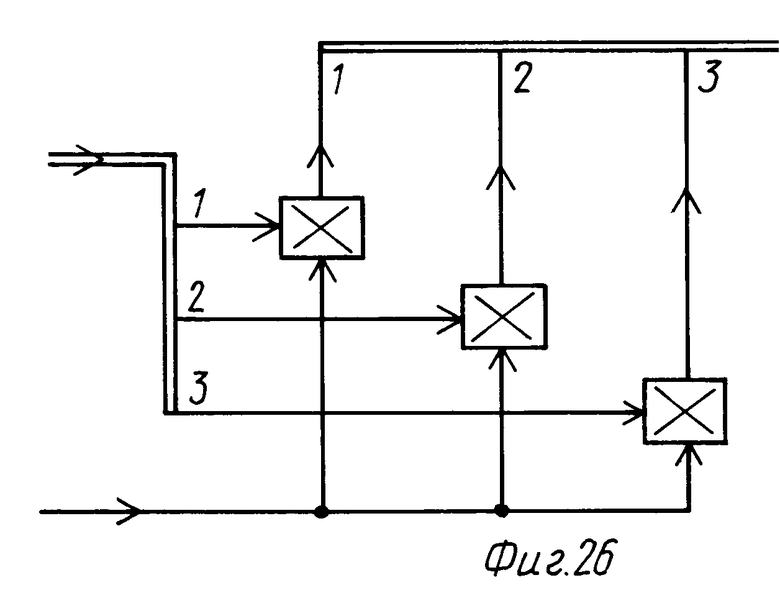
на момент выдачи управляющего импульса (блок 80), вычисление расчетного кинетического момента  в связанных осях (блок 81) и вычитание фактического кинетического момента из расчетного. Реализация блоков 80 и 81 приведена на фиг. 26 и 27 соответственно. Блоки 82, 83 и 84 вычисляют расчетный кинетический момент в инерциальном базисе по формуле:
в связанных осях (блок 81) и вычитание фактического кинетического момента из расчетного. Реализация блоков 80 и 81 приведена на фиг. 26 и 27 соответственно. Блоки 82, 83 и 84 вычисляют расчетный кинетический момент в инерциальном базисе по формуле:  Относительно связанных с КА осей вектор
Относительно связанных с КА осей вектор  является подвижным и определяется блоками 85, 86 и 87 по выражению
является подвижным и определяется блоками 85, 86 и 87 по выражению 
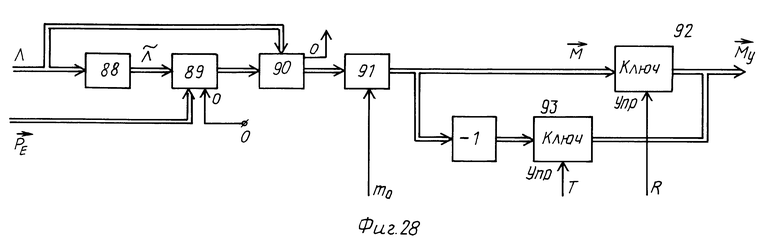
БФУМ 14 вычисляет потребный момент управления  исходя из фактического углового положения Λ и вектора разворота
исходя из фактического углового положения Λ и вектора разворота  (фиг.28). Он содержит блок 91 умножения вектора на скаляр, блок 88 обращения кватерниона, блоки 89, 90 умножения кватернионов, векторный инвертор и два ключа 92 и 93, коммутирующих с выходом
(фиг.28). Он содержит блок 91 умножения вектора на скаляр, блок 88 обращения кватерниона, блоки 89, 90 умножения кватернионов, векторный инвертор и два ключа 92 и 93, коммутирующих с выходом  либо
либо  (если R "1"), либо
(если R "1"), либо  (если R "1") и реализует функцию
(если R "1") и реализует функцию  При отсутствии сигналов на выходе БФУМ будет нулевой вектор момента.
При отсутствии сигналов на выходе БФУМ будет нулевой вектор момента.
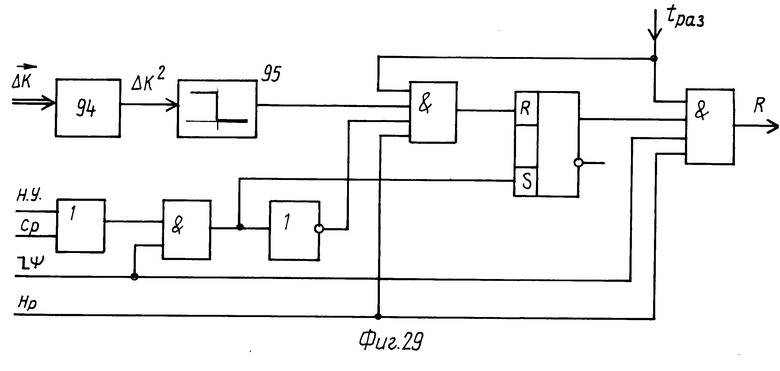
БФКР 15 представлен на фиг.29. Разрешающий сигнал на первом выходе (R "1") возможен только во время разворота КА (tразв "1"). Основу блока составляет триггер, управляемый схемами логического умножения. В исходном состоянии на выходе триггера установлена лог. "1", для чего и необходим вход "н.у.". Импульс на S входе возникает при наличии импульса на любом из входов "н. у. " или "ср.", при одновременном условии zψ = "1" Схема возведения вектора в квадрат 94 совместно с реле 95 определяют момент достижения фактическим кинетическим моментом требуемого значения и обнуляют триггер, тем самым устанавливая на выходе R "0". Сбор триггера возможен только в процессе разворота КА (tразв "1") при наличии ненулевого вектора разворота (Hp "1") и отсутствия сигнала на его S- входе. Выход БФКР так же защищен маскирующей схемой "И", гарантирующей отсутствие сигнала "1" на выходе в недопустимые моменты времени (tразв "0" или Hp "0", или zψ = "0".
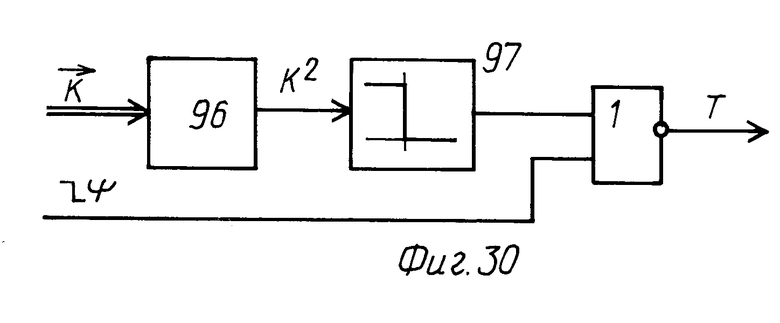
БФКТ 16 состоит из схемы 96 воздействия вектора в квадрат, реле 97 и логической схемы "ИЛИ-НЕ" (фиг.30). Если на логическом входе БФКТ установлен "0", то анализируется кинетический момент  и на выходе Т "1" до тех пор, пока
и на выходе Т "1" до тех пор, пока  В момент отсутствия кинетического момента логическая схема переключается и на выходе устанавливает Т "0".
В момент отсутствия кинетического момента логическая схема переключается и на выходе устанавливает Т "0".
БПВР 20 представляет собой усилитель с коэффициентом усиления примерно 0,98 и служит для обеспечения некоторого запаса по времени разворота.
БКПР 21 определяет параметры разворота для второго неуправляемого участка (Λ
БОПП 23 является схемой умножения кватернионов.
БОУД 26 имеет три входа и один выход, где реализуется функция: (фиг.32).
(фиг.32).
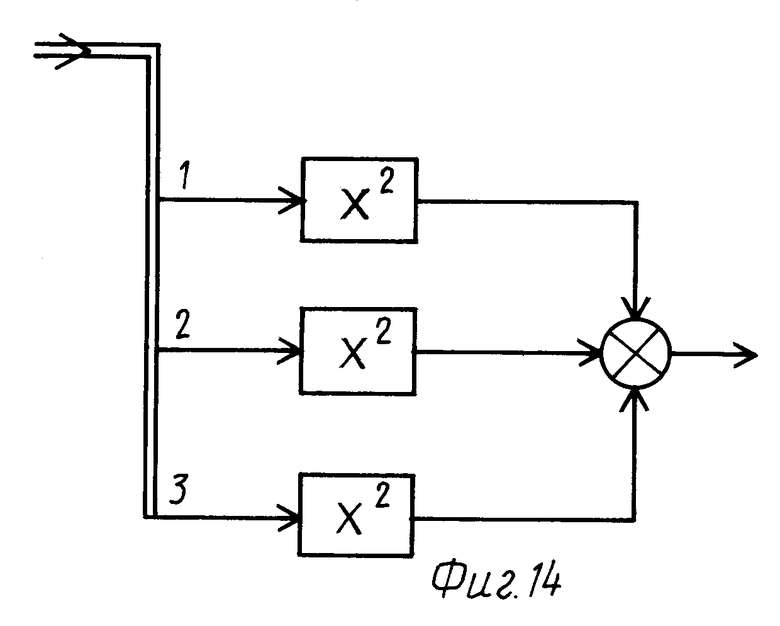
БОНВР 27 представлен на фиг.15 и состоит из схемы 68 возведения вектора в квадрат (фиг.14) и реле. Если на входе нулевой вектор, то на выходе устанавливается логический "0", в противном случае "1".
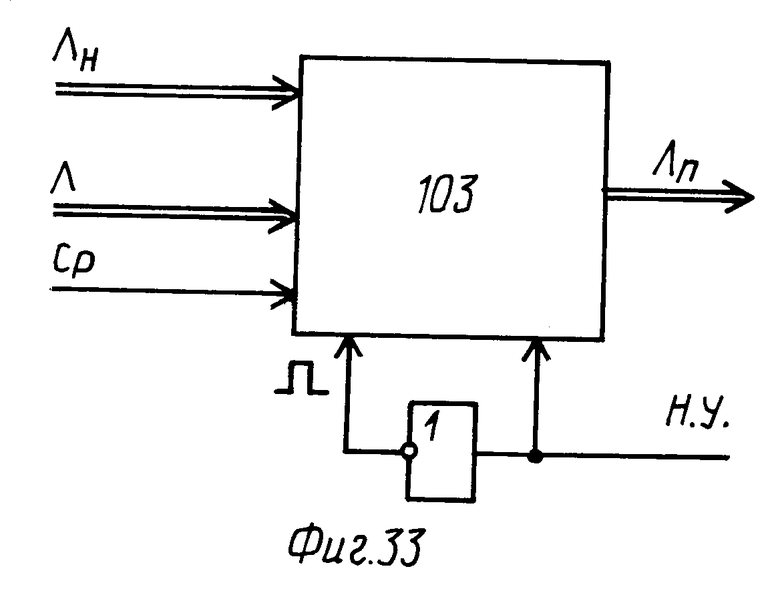
БФПР 22 и БФУПН 28 идентичны (фиг.33). Их основу составляет схема обновления 103, раскрытая на фиг.22. По импульсу "н.у." на выходе запоминается информация, снятая с первого информационного входа. По импульсу "ср." со второго информационного входа.
БОМВКИ 29 представлен на фиг.20.
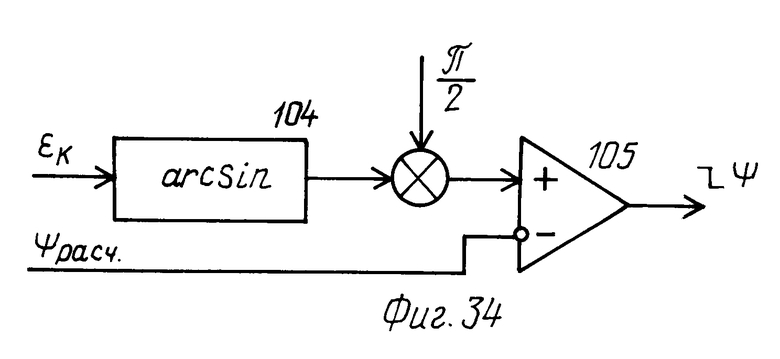
БОНТ 30 содержит блок нелинейной функции 104, сумматор и компаратор 105, который сравнивает величины: (фиг.24).
(фиг.24).
В момент, когда ν < ψрасч на выходе БОНТ формируется логический "0".
БОНРКИ 31 представлен на фиг.35 и состоит из блока 108 определения обратного кватерниона, двух блоков 106, 107 умножения кватернионов, схемы формирования прямоугольного импульса по переднему фронту входного сигнала (Т-С цепочка с шунтирующим диодом Д), фиксатора 109 векторного аналогового сигнала, схемы 111 определения квадрата вектора, схемы 112 извлечения корня квадратного и схемы 110 деления вектора на число. По отклонению кинетического момента от расчетного значения и угловому положению КА блоками 106,107, 108 определяется вектор  относительно инерциальной системы отчета. В момент единичного скачка на входе R найденное отклонение фиксируется схемой 109, после чего схемами 110, 111, 112 определяется направление разгонного импульса в инерциальном базисе
относительно инерциальной системы отчета. В момент единичного скачка на входе R найденное отклонение фиксируется схемой 109, после чего схемами 110, 111, 112 определяется направление разгонного импульса в инерциальном базисе
БОНТИ 32 полностью повторяет БОНРКИ и реализует требуемое соотношение для вектора  Значение этого вектора фиксируется по переднему фронту сигнала, поступающего с входа Т.
Значение этого вектора фиксируется по переднему фронту сигнала, поступающего с входа Т.
БОНУМ 33 представлен на фиг.36 и состоит из двух ключей, подающих на выход БОНУМ либо направление разгонного импульса (если R "1"), либо направление тормозного импульса (если Т "1"). Если оба сигнала отсутствуют, то на выходе БОНУМ установится нулевой вектор:  .
.
Описанная система работает следующим образом.
Прежде всего в БОМИПО 9 определяется момент инерции вокруг поперечной оси I. По начальному Λн и конечному Λк положениям в ВОПР определяется, как указано выше, кватернион разворота Λр и фиксируется в БФПР. Одновременно исходное положение КА фиксируется в БОМВКИ: Λп = Λн а БОПП определяет прицелочные параметры: Λпр= Λп° Λр Согласно полученному кватерниону разворота и инерционным характеристикам КА, БОНР выдает угол разворота ψ и направление кинетического момента  в связанной системе координат. Далее БОРУП модулирует движение объекта в ускоренном масштабе времени и в предположении, что ему сообщен кинетический момент в направлении
в связанной системе координат. Далее БОРУП модулирует движение объекта в ускоренном масштабе времени и в предположении, что ему сообщен кинетический момент в направлении  ; при этом определяются угловое положение на момент удовлетворения равенства νн = νк промах ε и кватернион m(Tк). Пока ε < εдоп фактическое угловое положение μ(Tк) полученное моделированием в БОРУП, сравнивается с требуемым Λпр и рассчитывается БОБПР новый кватернион разворота:
; при этом определяются угловое положение на момент удовлетворения равенства νн = νк промах ε и кватернион m(Tк). Пока ε < εдоп фактическое угловое положение μ(Tк) полученное моделированием в БОРУП, сравнивается с требуемым Λпр и рассчитывается БОБПР новый кватернион разворота:  который поступает в качестве исходных данных в БОНР, рассчитывается новое направление и т.д. процесс повторяется. Как только ε ≥ εдоп БОРУП фиксирует расчетное угловое положение КА в середине разворота и полученные в БОНР угол разворота и направление кинетического момента. По углу разворота в БОВРТ определяется время действия разгонного импульса τ которое фиксируется и остается постоянным на все время разворота. По информации об угловой скорости
который поступает в качестве исходных данных в БОНР, рассчитывается новое направление и т.д. процесс повторяется. Как только ε ≥ εдоп БОРУП фиксирует расчетное угловое положение КА в середине разворота и полученные в БОНР угол разворота и направление кинетического момента. По углу разворота в БОВРТ определяется время действия разгонного импульса τ которое фиксируется и остается постоянным на все время разворота. По информации об угловой скорости  выдаваемой БДУС в БОКМ, определяется фактический кинематический момент
выдаваемой БДУС в БОКМ, определяется фактический кинематический момент  В БООКМ вычисляется требуемый кинетический момент
В БООКМ вычисляется требуемый кинетический момент  и путем сравнения его с фактическим определяется отклонение
и путем сравнения его с фактическим определяется отклонение  которое является исходной информацией для формирования направления разгонного импульса. По ней в БОНРКИ определяется направление
которое является исходной информацией для формирования направления разгонного импульса. По ней в БОНРКИ определяется направление  разгонного импульса в инерциальном базисе. Найденный вектор поступает в БОНУМ. По фактическому угловому положению, определенному БИНС, определяется вектор момента управления
разгонного импульса в инерциальном базисе. Найденный вектор поступает в БОНУМ. По фактическому угловому положению, определенному БИНС, определяется вектор момента управления
Разрешение на выдачу разгонного импульса (или импульса коррекции) определяется сигналом R.
Временные диаграммы процесса разворота представлены на фиг.37. В начальный момент времени:
Сигнал начальной установки "н.у." в виде двух прямоугольных импульсов вводит систему в исходное состояние. В момент поступления команды на разворот tразв "1" появляется сигнал разгона R "1", и БФУМ формирует управляющий момент  в направлении расчетного кинетического момента
в направлении расчетного кинетического момента  БДУС измеряет абсолютную угловую скорость
БДУС измеряет абсолютную угловую скорость  в БОКМ определяется фактический кинетический момент, и разгон продолжается до тех пор, пока этот момент не совпадает с расчетным. При достижении КА требуемого кинетического момента:
в БОКМ определяется фактический кинетический момент, и разгон продолжается до тех пор, пока этот момент не совпадает с расчетным. При достижении КА требуемого кинетического момента:  управление прекращается: R "0".
управление прекращается: R "0".  0, и аппарат совершает свободное движение.
0, и аппарат совершает свободное движение.
По достижении половины угла разворота БОМВКИ выдает импульс ср. "1", по которому БФУПН фиксирует текущее угловое положение связанных осей: Λп= Λ ВКПР рассчитывает кватернион разворота второй половины пути Λ требуемого кинетического момента, в БООКМ сравнивается фактический кинетический момент с расчетным; найденное отклонение
требуемого кинетического момента, в БООКМ сравнивается фактический кинетический момент с расчетным; найденное отклонение  определяет направление корректирующего импульса, появляется разрешение на коррекцию движения; Hp "1", R "1" и БФУМ выдает импульс
определяет направление корректирующего импульса, появляется разрешение на коррекцию движения; Hp "1", R "1" и БФУМ выдает импульс  направленный на совмещение кинетического момента КА с требуемым значением. В момент
направленный на совмещение кинетического момента КА с требуемым значением. В момент  действие импульса прекращается, и КА совершает неуправляемый разворот.
действие импульса прекращается, и КА совершает неуправляемый разворот.
Во все время движения определяется остаточный угол νк доворота до конечного углового положения, который в БОНТ сравнивается с предельно допустимой величиной ψрасч определенной БОУД, и когда νк≅ ψрасч на выходе БОНТ формируется логический сигнал "zψ" = "0" запрещающий дальнейший контроль движения КА. По нему БФКТ формирует сигнал на торможение: Т "1", по которому БОНУМ фиксирует направление  вычисляемое в БОНТИ с учетом фактического углового положения КА на момент начала торможения. Это направление сохраняется постоянным в инерциальном пространстве.
вычисляемое в БОНТИ с учетом фактического углового положения КА на момент начала торможения. Это направление сохраняется постоянным в инерциальном пространстве.
БФУМ определяет тормозной импульс
который направлен против фактического кинетического момента  и действует до полной остановки объекта:
и действует до полной остановки объекта:  При
При  сигнал Т "0" говорит о том, что разворот окончен. Система готова к следующему развороту.
сигнал Т "0" говорит о том, что разворот окончен. Система готова к следующему развороту.
Эффективность предлагаемой системы обусловлена прежде всего тем, что на большей части траектории разворота участках свободного вращения управление отсутствует, что позволяет значительно снизить расход топлива на разворот. Вместе с тем, специальным образом организованные контроль и коррекция траектории движения, как это было описано выше, существенно повышают точность приведения КА в требуемое угловое положение. На корректирующий импульс затраты топлива незначительны.
Использование: космическая техника, управление угловым движением и положением орбитальных станций, перспективных платформ и других космических аппаратов (КА). Сущность изобретения: в процессе свободного вращения КА осуществляют коррекцию его углового движения так, чтобы траектория этого движения прошла через заданное конечное угловое положение КА, при этом момент приложения, величину и направление корректирующего импульса выбирают по текущим углам отклонения КА от его начального и конечного угловых положений, используя формализм кватернионов. Для реализации способа применена система управления, в которой алгоритмически решается краевая задача перевода КА из исходного углового положения в заданное конечное затребуемое время, при этом выбирается необходимая начальная угловая скорость КА и формируется, на базе измеряемых углов поворота и кинетического момента КА, управляющий момент для разгона и торможения КА. Построение траектории разворота КА в основном из участков свободных траекторий, при специально организованных контроле движения и его коррекции, позволяет снизить массово-энергетические затраты на разворот КА и повысить точность реализации данного маневра. 2 с.и.1 з.п. ф-лы, 37 ил.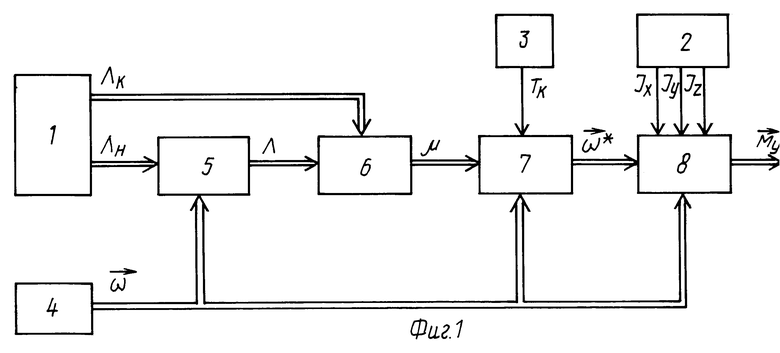
где Λк- кватернион заданного конечного углового положения космического аппарата;
Λ*- кватернион прогнозируемого углового положения космического аппарата;
Λ - кватернион текущего углового положения космического аппарата;
Λпр- кватернион прицелочного положения космического аппарата,
затем определяют вектор кинетического момента  требуемого для приведения космического аппарата при свободном его вращении в прицелочное положение, и прикладывают к космическому аппарату управляющий момент, определяемый выражением
требуемого для приведения космического аппарата при свободном его вращении в прицелочное положение, и прикладывают к космическому аппарату управляющий момент, определяемый выражением
до тех пор, пока 
где  фактический кинетический момент космического аппарата;
фактический кинетический момент космического аппарата; требуемый кинетический момент;
требуемый кинетический момент;
m0 максимальная величина управляющего момента,
с момента равенства фактического кинетического момента  требуемому
требуемому  измеряют угол разворота вокруг оси эквивалентного вращения от текущего к конечному угловому положению νк, определяют значение угла доворота ψдов, производимого при торможении космического аппарата, по выражению
измеряют угол разворота вокруг оси эквивалентного вращения от текущего к конечному угловому положению νк, определяют значение угла доворота ψдов, производимого при торможении космического аппарата, по выражению
где I1, I2, I3 моменты инерции космического аппарата относительно его связанных осей;
I момент инерции космического аппарата вокруг поперечной оси;
l1, l2, l3 компоненты кватерниона доворота;
в момент равенства νк = ψдов определяют направление тормозного импульса и прикладывают к космическому аппарату управляющий момент в этом направлении. требуемому
требуемому  непрерывно определяют параметры доворота
непрерывно определяют параметры доворота определяют кинетический момент доворота в проекциях на связанные оси аппарата
определяют кинетический момент доворота в проекциях на связанные оси аппарата
определяют угол доворота, производимого космическим аппаратом при торможении, по выражению
где  вектор угловой скорости космического аппарата,
вектор угловой скорости космического аппарата,
измеряют угол разворота вокруг оси эквивалентного вращения от текущего к конечному угловому положению, а в момент равенства
к космическому аппарату прикладывают корректирующий момент до достижения равенства  с момента выполнения условия νк = νдов к космическому аппарату прикладывают управляющий момент
с момента выполнения условия νк = νдов к космическому аппарату прикладывают управляющий момент
до полной остановки космического аппарата.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Крутько П.Д | |||
| Обратные задачи динамики управляемых систем | |||
| - М.: Наука, 1988, с | |||
| Приспособление, заменяющее сигнальную веревку | 1921 |
|
SU168A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Бранец В.Н., Черток М.Б., Казначеев Ю.В | |||
| Оптимальный разворот твердого тела с одной осью симметрии: Космические исследования, т.22, вып.3 | |||
| - М., 1984. | |||
