Изобретение относится к металлургии, а именно к оборудованию для внепечной обработки металла при повышенных требованиях к точности горизонтального положения крышки ковша при ее перемещении.
Известно устройство для внепечной обработки жидкого металла, содержащее ковш, накрытый герметичной крышкой, закрепленной на штоках гидроцилиндров, сливную и напорную магистрали, синхронизатор перемещения штоков гидроцилиндров, выполненный в виде гидромоторов, каждый из которых посредством трубопровода соединен с соответствующим гидроцилиндром и имеющий валы, механически связанные между собой.
Предложенная вместо шагового двигателя конструкция синхронизатора не может контролировать и корректировать положение штоков в гидроцилиндрах. Она рассчитана на возможность установления одинакового для каждого гидромотора расхода масла, нагнетаемого в соответствующий гидроцилиндр. Однако, вследствие разных объемных КПД гидромоторов эта возможность не гарантирована, следовательно, и достигаемая точность синхронизации работы гидроцилиндров невысока. При условии, что на крышке размещена сложная аппаратура для управления процессом обработки металла, должна быть обеспечена более высокая точность синхронизации.
Цель изобретения - повышение заданной точности горизонтального положения крышки при ее вертикальном перемещении.
Для достижения поставленной цели гидромоторы синхронизатора соединены с напорной и сливной магистралью через двухпозиционный гидрораспределитель с электромагнитным управлением, а гидроцилиндры снабжены автономными двухпозиционными гидрораспределителями и датчиками положения, механически связанными с штоками гидроцилиндров и имеющими электрическую связь с модулем управления электромагнитами гидрораспределителей, при этом автономные гидрораспределители соединены с напорной и сливной магистралью.
Соединение гидромоторов синхронизатора с магистралью через гидрораспределитель, а также гидроцилиндров - через автономные гидрораспределители, и снабжение гидроцилиндров датчиками положения, контролирующими положение каждого из штоков гидроцилиндров, позволяет во время переноса крышки корректировать это положение и обеспечивать тем самым заданную точность горизонтального положения крышки.
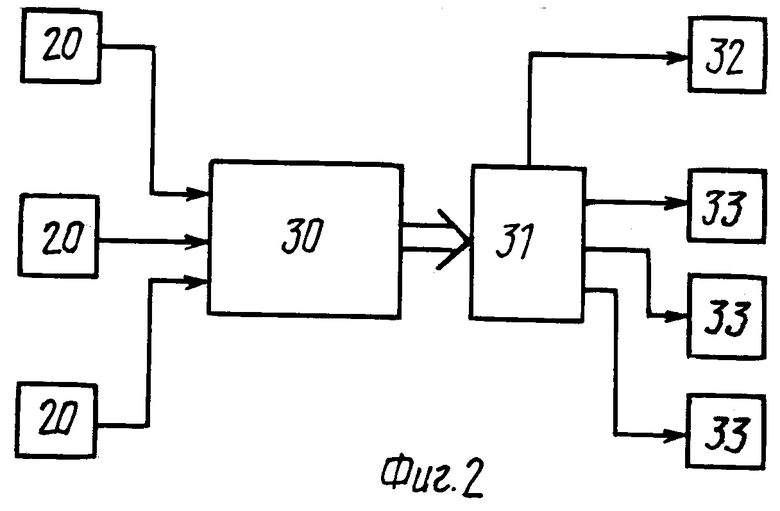
На фиг. 1 показано устройство согласно изобретению; на фиг. 2 - электрическая схема управления электромагнитами гидрораспределителей.
Устройство содержит ковш 1, накрытый крышкой 2, которая закреплена на штоках 3 гидроцилиндров 4, каждый из которых соединен через гидрозамок 5 посредством трубопровода 6 с гидромотором реверсивного действия 7. При этом два крайних гидромотора установлены симметрично относительно центрального. На выходных концах валов 8 гидромоторов 7 установлены цилиндрические шестерни 9, находящиеся в зацеплении между собой. Гидромоторы посредством трубопроводов 10 связаны с напорной 11 и сливной 12 магистралями через двухпозиционный гидрораспределитель 13 и гидрораспределитель направления потока 14. Каждый шток 3 гидроцилиндров 4 посредством цепи 15 и противовеса 16 соединен со звездочкой 17, установленной на валу редуктора 18, другой вал которого через муфту 19 соединен с выходным валом датчика положения 20.
Через гидрораспределитель направления потока 14 с напорной 11 и сливной 12 магистралями соединены трубопроводом 21 каналы управления гидрозамков 5, а трубопроводом 22 - автономные гидрораспределители 23 перемещения штоков 3 гидроцилиндров 4, каждый из которых соединен трубопроводом 6 через гидрозамок 5 с рабочей полостью соответствующего гидроцилиндра.
На крышке 2 выполнены отверстия 24 для электродов, вводимых для нагрева обрабатываемого металла, отверстия 25 для ввода термопроба, отверстие 26 для подачи композиционной алюминиевой проволоки, патрубок 27 для подачи сыпучих материалов, патрубок 28 для отвода реакционных газов, гляделка с телекамерой 29. Электрическая схема управления электромагнитами гидрораспределителей (фиг. 2) состоит из датчиков положения, модуля управления электромагнитами, содержащего контроллер управления 30 и модуль гальванической развязки 31, соединенного с электромагнитом 32 гидрораспределителя 13 и электромагнитами 33 гидрораспределителей 23.
Устройство работает следующим образом.
После выпуска металла из печи ковш 1 подают на обработку и, опуская крышку 2 гидроцилиндрами 4, накрывают его. Затем отбирается проба металла на химанализ с замером температуры через отверстие 25 крышки 2, после чего производится подогрев металла электродами, опущенными через отверстие 24, и вводятся раскислители и легирующие материалы через патрубок 27 до получения заданного химсостава и температуры. При необходимости подается композиционная алюминиевая проволока через отверстие 26.
После окончания обработки металла крышку 2 поднимают и ковш 1 транспортируют на разливку.
При подъеме крышки 2 масло, нагнетаемое под давлением по напорной магистрали 11, через гидрораспределитель направления потока 14, автоматически занимающего соответствующее положение, гидрораспределитель 13, по трубопроводу 10, проходит через гидромоторы 7, приводя в синхронное вращение их валы 8. Одновременно с началом вращения устанавливается одинаковый для каждого трубопровода 6 расход масла, нагнетаемого в соответствующий гидроцилиндр 4, в результате чего происходит синхронное перемещение вверх штоков 3 вместе с закрепленной на них крышкой 2, насколько это возможно при разных объемных КПД гидромоторов.
При этом цепи 15, соединенные с штоками 3, приводят во вращение звездочки 17. Через редукторы 18 и муфты 19 вращение передается выходным валам датчиков положения 20, с которых поступает сигнал на микропроцессорный контроллер 30, в котором происходит сравнение приращений показаний датчиков 20. При рассогласовании сигналов, превышающем заданную допустимую величину, через модуль гальванической развязки 31 включается электромагнит 32 гидрораспределителя 13, перекрывающего доступ масла от напорной магистрали 11, через гидромоторы 7, трубопровод 6 к гидроцилиндрам 4, чем блокируется совместная работа гидроцилиндров. Одновременно с электромагнитом 32 включаются электромагниты 33 соответствующих автономных гидрораспределителей 23, чем открывается доступ масла, нагнетаемого под давлением по напорной магистрали 11, через гидрораспределитель направления потока 14, по трубопроводам 22, через соответствующие автономные гидрораспределители 23, гидрозамки 5 в рабочие полости тех гидроцилиндров, положение штоков 3 которых ниже положения штоков других гидроцилиндров. Таким образом, отстающие штоки поднимаются до высоты остальных штоков, чем выравнивается горизонтальное положение закрепленной на них крышки 2.
Каждые 0,001 секунды микропроцессорный контроллер 30 опрашивает состояние датчиков положения 20 включенных гидроцилиндров. Как только показания датчиков положения выравниваются, выключаются электромагниты 33 соответствующих автономных гидрораспределителей 23, чем перекрывается доступ масла от напорной магистрали 11 по трубопроводу 22 к соответствующим гидроцилиндрам 4. При этом одновременно включается электромагнит 32 гидрораспределителя 13, чем открывается доступ масла от напорной магистрали 11 через гидромоторы 7, трубопровод 6 ко всем гидроцилиндрам 4.
Продолжается синхронное перемещение вверх штоков 3 вместе с закрепленной на них крышкой 2. При достижении горизонтального положения крышки и необходимой высоты подъема гидрораспределитель 14 переводится автоматически в нейтральное положение. Опусканию крышки препятствуют гидрозамки 5. При опускании крышки 2 масло, сливаемое из гидроцилиндров 4 через гидрозамки 5 по тем же маслопроводам 6, 10 через гидрораспределитель 13, гидрораспределитель направления потока 14, автоматически занимающего соответствующее положение, также проходит через гидромоторы 7, приводя в синхронное вращение валы 8 в направлении, противоположном нагнетанию масла.
Одновременно с началом вращения устанавливается одинаковый расход сливаемого из гидроцилиндров 4 масла, в результате чего происходит синхронное опускание штоков 3 вместе с закрепленной на них крышкой 2, насколько это возможно при разных объемных КПД гидромоторов. При этом через цепочки 15, звездочки 17, редуктор 18 и муфту 19 перемещение штоков 3 передается выходным валам датчиков положения 20, подающих электрический сигнал на микропроцессорный контроллер 30, который каждые 0,001 секунды считывает и сравнивает показания датчиков положения 20. Если рассогласование показаний не превышает допустимой величины, совместная работа гидроцилиндров продолжается, если же превышает, то через модуль гальванической развязки 31 поступает сигнал на включение электромагнита 32 гидрораспределителя 13, блокирующего совместную работу гидроцилиндров 4. Одновременно включаются электромагниты 33 соответствующих автономных гидрораспределителей 23, чем обеспечивается слив масла из тех гидроцилиндров, положение штоков которых выше положения штоков других гидроцилиндров, через гидрозамки 5, автономные гидрораспределители коррекции 23, по трубопроводам 22 через гидрораспределитель направления потока 14 в магистраль 12.
Таким образом, отстающие штоки опускаются до высоты остальных штоков, чем выравнивается горизонтальное положение закрепленной на них крышки 2.
Таким образом, в предлагаемом устройстве достигается заданная необходимая точность горизонтального положения крышки при ее вертикальном перемещении. (56) Industrial Heating, 1982, N 9, р. 8-10, 12.
Авторское свидетельство СССР N 1296598, кл. С 21 С 7/10, 1987.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИДРАВЛИЧЕСКАЯ СИСТЕМА УПРАВЛЕНИЯ ТРАНСПОРТНО-ПУСКОВЫМ КОНТЕЙНЕРОМ МИННОГО ЗАГРАДИТЕЛЯ | 2010 |
|
RU2442944C1 |
| ГИДРОСИСТЕМА КРАНО-МАНИПУЛЯТОРНОЙ УСТАНОВКИ | 2003 |
|
RU2252909C2 |
| ГИДРАВЛИЧЕСКИЙ ПРИВОД ПРЕИМУЩЕСТВЕННО МОБИЛЬНОЙ УСТАНОВКИ С КАЧАЮЩЕЙСЯ ЧАСТЬЮ | 2015 |
|
RU2629763C2 |
| ГИДРОСИСТЕМА МОБИЛЬНОЙ МАШИНЫ | 1998 |
|
RU2158861C2 |
| КРАНО-МАНИПУЛЯТОРНАЯ УСТАНОВКА | 2003 |
|
RU2264347C2 |
| ГИДРОПРИВОД МЕХАНИЗМА ПОВОРОТА СТОЙКИ ОПОРНО-ПОВОРОТНОГО УСТРОЙСТВА КРАНО-МАНИПУЛЯТОРНОЙ УСТАНОВКИ | 2002 |
|
RU2252911C2 |
| УСТРОЙСТВО ДЛЯ ПОДАЧИ ДЛИННОМЕРНОГО ПРОКАТА В ЗОНУ ОБРАБОТКИ | 1994 |
|
RU2104115C1 |
| Гидропривод грузовой лебедки | 1985 |
|
SU1268507A1 |
| Гидропривод грузовой лебедки | 1985 |
|
SU1268506A1 |
| ГИДРАВЛИЧЕСКИЙ ПРИВОД ПРЕИМУЩЕСТВЕННО МОБИЛЬНОЙ АНТЕННОЙ УСТАНОВКИ С ПОДЪЕМНОЙ МАЧТОЙ | 2005 |
|
RU2281244C1 |
Изобретение может быть использовано в металлургии при внепечной обработке металла. Сущность изобретения: устройство содержит ковш 1, накрытый крышкой 2, которая закреплена на штоках 3 гидроцилиндров 4. Устройство имеет механический синхронизатор перемещения штоков гидроцилиндров, выполненный в виде гидромоторов 7, соединенных с гидроцилиндрами 4 и имеющих валы 8, механически соединенные между собой. Гидромоторы 7 синхронизатора включены в напорную 11 и сливную 12 магистрали через гидрораспределитель 13. Гидроцилиндры также включены в магистрали 11 и 12 через автономные гидрораспределители 23 и снабжены датчиками положения 20, имеющими электрическую связь с электромагнитами гидрораспределителей. При подъеме или опускании крышки 2 микропроцессорный контроллер 30 каждые 0,001 с считывает и сравнивает показания датчиков положения 20 штоков гидроцилиндров. Если рассогласование показаний не превышает допустимую величину, синхронная совместная работа гидроцилиндров продолжается, если же превышает, то включается электромагнит гидрораспределителя 13, который блокирует совместную работу гидроцилиндров 4, при этом одновременно включаются электромагниты соответствующих гидрораспределителей 23, чем обеспечивается подача (при подъеме) или слив масла (при опускании крышки) из рабочих полостей тех гидроцилиндров, положение штоков которых выше или ниже положения штоков других гидроцилиндров. 2 ил.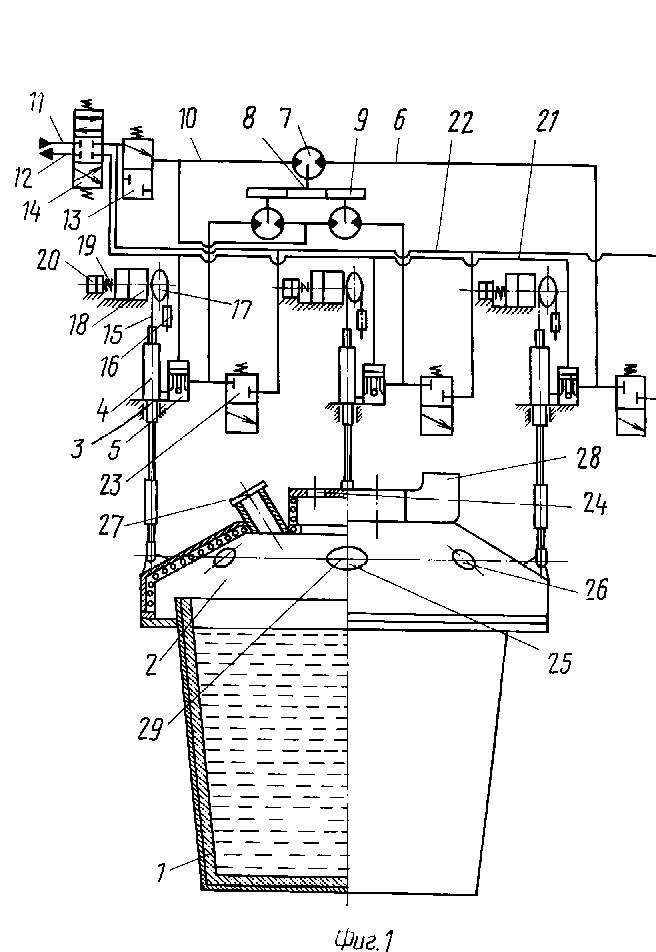
УСТРОЙСТВО ДЛЯ ВНЕПЕЧНОЙ ОБРАБОТКИ ЖИДКОГО МЕТАЛЛА, содержащее ковш с крышкой, закрепленной на штоках гидроцилиндров, напорную и сливную магистрали и синхронизатор перемещения штоков гидроцилиндров, выполненный в виде гидромоторов, связанных посредством трубопроводов с соответствующими гидроцилиндрами и имеющих валы, механически связанные между собой, отличающееся тем, что, с целью повышения заданной точности горизонтального положения крышки при ее вертикальном перемещении, гидромоторы синхронизатора соединены с напорной и сливной магистралями через двухпозиционный гидрораспределитель с электромагнитным управлением, а гидроцилиндры снабжены автономными двухпозиционными гидрораспределителями и датчиками положения, механически связанными со штоками гидроцилиндров и имеющими электрическую связь с модулем управления электромагнитами гидрораспределителей, при этом автономные гидрораспределители соединены с напорной и сливной магистралями.
