Изобретение относится к измерительной технике и может быть использовано для определения параметров движения объектов в навигации и составляющих электромагнитного и магнитного полей Земли, характеризующих геоэлектрические свойства среды при электроразведке.
Известны способы измерения сигналов векторными измерителями угловой скорости и линейных ускорений со структурно-информационной избыточностью [1] . В них используются как минимум по четыре первичных преобразователя, вырабатывающих сигналы о величине действующих по осям чувствительности этих преобразователей значений угловых скоростей или линейных ускорений. Для эффективного использования избыточности указанные преобразователи ориентируются в осях основного измерительного базиса так, что все их оси чувствительности не являются коллинеарными между собой и более любых двух из них не компланарны.
Таким образом, использование избыточности позволяет наряду с решением задачи повышения надежности обеспечивать улучшение работы векторных измерителей и по точности. Повышение надежности достигается путем исключения из числа избыточных измерительных базисов недостоверных данных, выявляемых с помощью мажоритарных операций над сигналами преобразователей векторного измерителя. Улучшение точности работы измерителя в этом случае обеспечивается за счет выбора в качестве эталонных сигналов либо значений медиан, либо осреднения нескольких центральных членов вариационных рядов, получаемых при мажоритарных преобразованиях сигналов измерителя. Способы исключения сигналов преобразователей с метрологическими отказами и выбор эталонных значений из оставшихся реализуются как использованием специальных устройств, так и на основе данных, получаемых в результате обработки сигналов от преобразователей векторного измерителя средствами вычислительной техники.
Наиболее близким техническим решением к изобретению является способ измерения сигналов векторным измерителем при структурно-информационной избыточности [2] , включающий измерение сигналов, пропорциональных проекциям измеряемого вектора, при помощи блока преобразователей, образующих измерительные базисы, выполненного со структурно-информационной избыточностью, определение и исключение из измеренной совокупности сигналов отказавших преобразователей.
Недостатком способа является использование измерительных сигналов от всей совокупности измерительных сигналов от всей совокупности неотказавших преобразователей для определения параметров измеряемого вектора.
Целью изобретения является повышение достоверности значений формируемых величин.
Цель достигается тем, что по способу измерения сигналов векторным измерителем при структурно-информационной избыточности, включающему измерение сигналов, пропорциональных проекциям измеряемого вектора, при помощи блока преобразователей, образующих измерительные базисы, выполненного со структурно-информационной избыточностью, определение и исключение из измеренной совокупности сигналов отказавших преобразователей, дополнительно производят определение параметров векторной величины раздельно как по направлению, так и по модулю в этом направлении, при этом совокупность измерительных базисов формируется с учетом влияния ориентации измерительных базисов относительно измеряемого вектора на достоверность измерений преобразователей, оси чувствительности которых образуют измерительный базис.
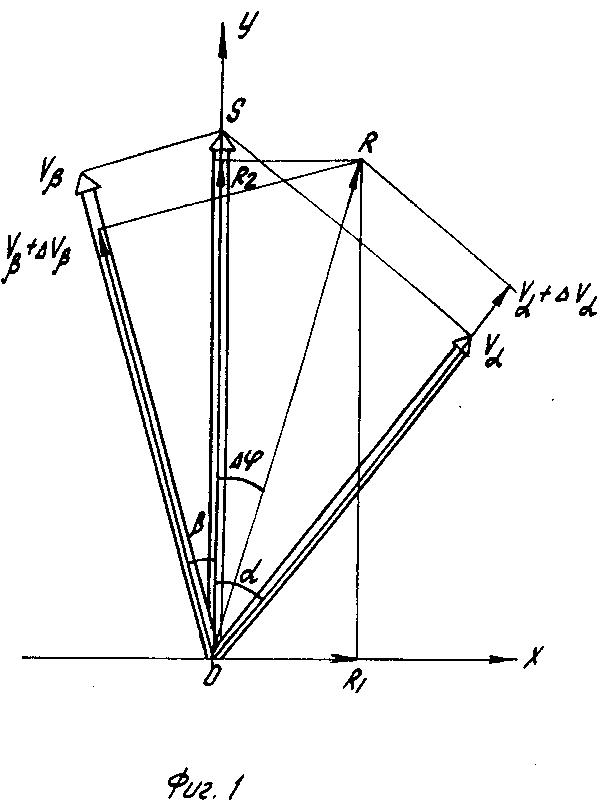
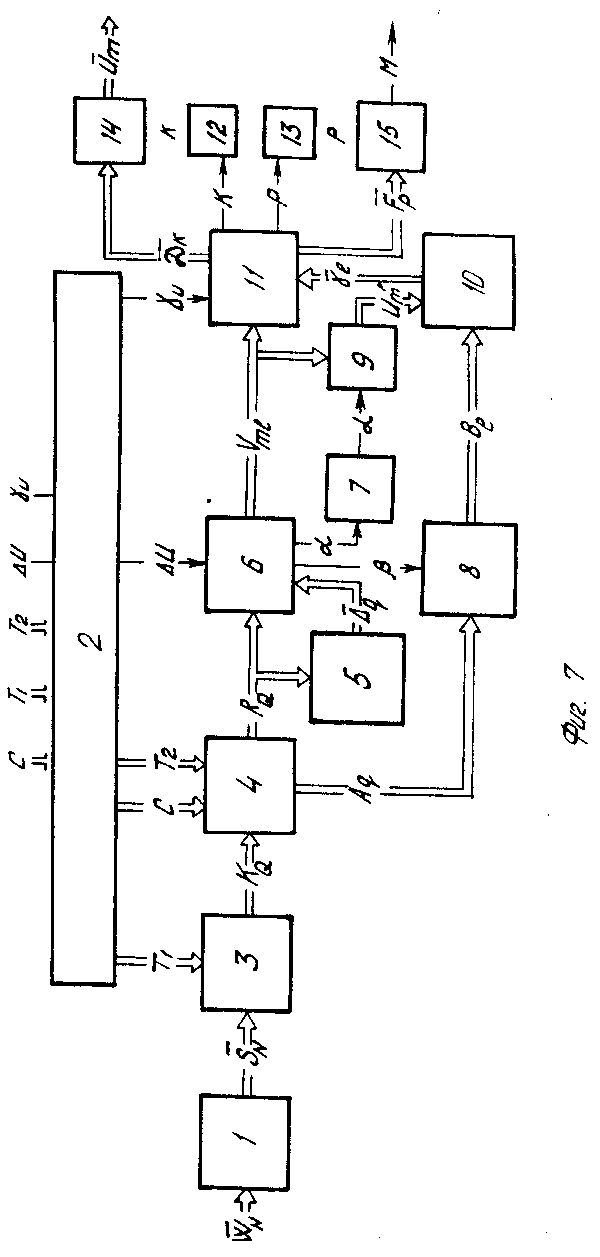
Целесообразность введения таких этапов измерения сигналов измерителя заключается в том, что точность его работы при неидеальных метрологических характеристиках преобразователей может зависеть не только от количества преобразователей и структуры их размещения, но и от текущих параметров самого измеряемого вектора. Учет в процессе обработки сигналов особенностей ориентации осей координат используемых измерительных базисов относительно измеряемого вектора дает возможность улучшать характеристики векторного измерителя по точности. На фиг. 1 представлено определение компонент сигнала при наличии погрешностей в преобразователях на примере измерения двумерного вектора; на фиг. 2 - рассогласование ошибок измерения в зависимости от параметров взаимной ориентации действующего сигнала и измерительных базисов; на фиг. 3 - представлена зависимость ошибки измерения вектора по направлению от параметров взаимной ориентации координатных осей измерительных базисов и действующего вектора; на фиг. 4 - зависимость ошибки измерения модуля вектора от параметров взаимной ориентации координатных осей измеpительных базисов и действующего вектора; на фиг. 5 - зависимость измерения вектора по направлению от параметров взаимной ориентации координатных осей измерительных базисов и действующего вектора при различных уровнях погрешностей используемых преобразователей; на фиг. 6 - зависимость ошибки измерения модуля вектора от параметров взаимной ориентации координатных осей измерительных базисов и действующего вектора при различных уровнях погрешностей преобразователей; на фиг. 7 - блок-схема устройства, реализующего предлагаемый способ измерения сигналов векторным измерителем при структурно-информационной избыточности, где 1 - блок преобразователей, 2 - блок внешней памяти, 3 - блок распределения сигналов, 4 - первый вычислительный блок, 5 - блок мажорирования сигналов, 6 - блок классификации сигналов от измерительных базисов, 7 - счетчик измерительных базисов без метрологических отказов, 8 - блок анализа данных, 9 - второй вычислительный блок, 10 - блок вычисления суммарных углов между осями чувствительности преобразователей соответствующих измерительных базисов и измеряемым вектором, 11 - блок для определения направления измеряемого вектора, 12 - первый счетчик, 13 - второй счетчик, 14 - блок определения направления, 15 - блок определения модуля.
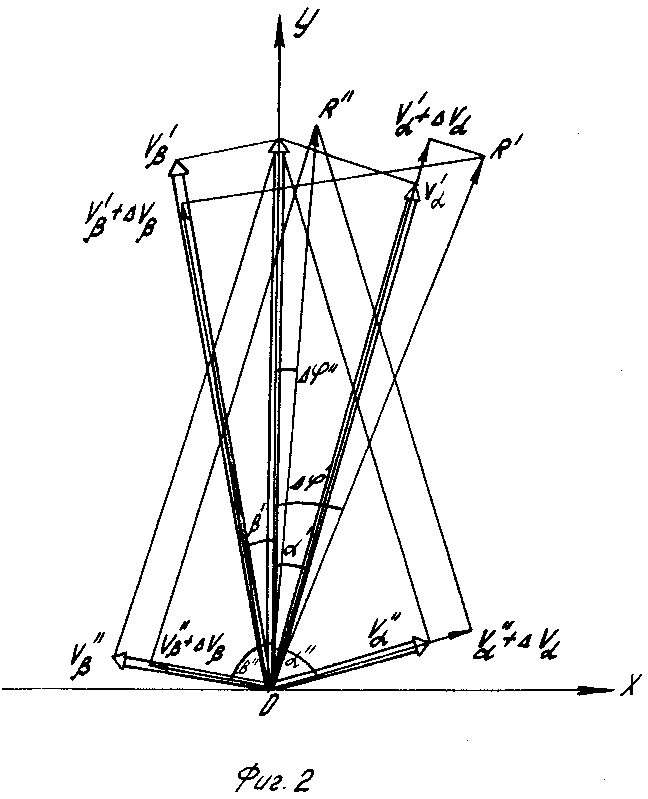
Влияние взаимной ориентации осей координат измерительных базисов и измерительного вектора на качество работы измерителя по точности наиболее просто можно увидеть на примере измерения двумерного вектора. Если в момент измерения оси координат основного измерительного базиса (ХОY) ориентированы так, что одна из них, как показано на фиг. 1, совпадает по направлению с измеряемым сигналом (S), а оси чувствительности преобразователей направлены под углами α и β относительно измеряемого вектора, то компоненты этого вектора в направлении осей чувствительности соответствующих преобразователей определяются следующим образом:
 (1)
(1)
При наличии погрешностей Δ Vα и Δ Vβ в измерительных каналах преобразователей компоненты R1 и R2 измеряемого сигнала в осях основного измерительного базиса связаны с сигналами преобразователей следующей системой уравнений:

 . (2)
. (2)
Эти компоненты с учетом выражения (1) после решения системы (2) могут быть представлены следующим образом:
R1=  ;
;
R2= S+  . (3)
. (3)
Как видно из выражения (3), наличие погрешностей измерения сигналов преобразователями приводит к ошибкам в определении компонент измеряемого сигнала в осях основного измерительного базиса. Имея эти соотношения, можно оценить как погрешность определения направления измеряемого вектора, так и ошибку его модуля.
Значения ошибок по углу и модулю соответственно могут быть установлены с помощью соотношений

 (4)
(4)
После несложных преобразований


 (5)
(5)
Представленные соотношения показывают, что появление погрешностей в измерительных каналах преобразователей может приводить к изменению точности измерения исходного сигнала векторным измерителем. Причем ошибки измерения действующего вектора как по модулю, так и по направлению зависят, как видно из соотношения (5), не только от ошибок измерения отдельных компонент его, но и от параметров взаимной ориентации измеряемого вектора и осей координат используемого измерительного базиса. Достаточно наглядно такая зависимость проглядывается на примере, приведенном на фиг. 2, где показано как выбор измерительного базиса может влиять на качество работы векторного измерителя по точности при одинаковых уровнях погрешностей преобразователей и характере их распределения по этим преобразователям.
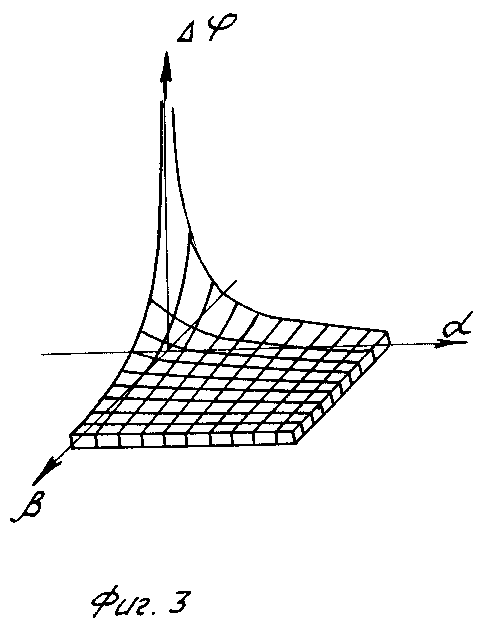
Более полно особенности проявления таких ошибок измерения сигналов векторным измерителем можно увидеть на примерах, которые показывают изменение ошибок по углу (фиг. 3) и по модулю (фиг. 4) в зависимости от параметров взаимной ориентации осей координат измерительного базиса и измеряемого вектора при некоторых фиксированных уровнях ошибок в используемых преобразователях. При построении указанных графиков использовались соотношения (5) для случая, когда ошибки преобразователей и уровень измеряемого сигнала соответствовали следующим значениям:
 =
=  (6)
(6)
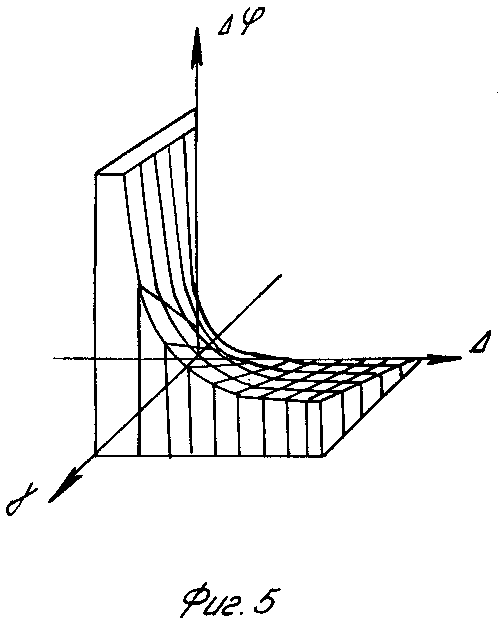
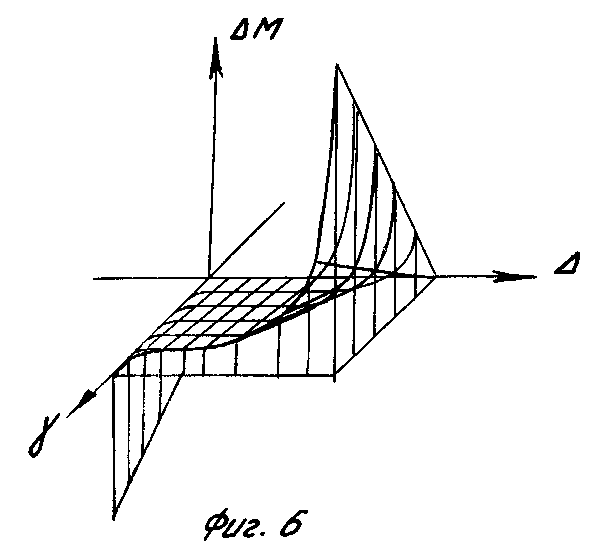
Влияние параметров взаимной ориентации осей координат измерительного базиса и измеряемого вектора при изменении метрологических свойств преобразователей можно увидеть на примерах, представленных на фиг. 5 и 6. В качестве аргументов для этих параметров использовались параметры структуры измерительных базисов в виде суммы углов:
γ = α + β, (7) а параметры метрологии преобразователей задавались в виде разности погрешностей:
Δ = Δ Vα - Δ Vβ . (8)
Кроме того, для упрощения полагалось



 (9)
(9)
Как можно видеть из приведенных примеров, ошибки измерения сигналов векторным измерителем зависят не только от погрешностей, возникающих в используемых преобразователях измерителя, но и от параметров взаимной ориентации координатных осей измерительных базисов относительно измеряемого вектора. Кроме того, влияния этих параметров на точность измерения направления и на его модуль могут существенно различаться и, как видно из приведенных примеров, эти зависимости имеют противоположный характер. Если при измерении направления с увеличением суммарного угла в виде (7) точность определения направления повышается, то при измерении модуля для значительного диапазона изменения аргумента имеет место противоположное. Это обстоятельство показывает, что при построении процедур измерения параметров вектора при наличии избыточных измерительных базисов целесообразно для определения параметров направления и его модуля в этом направлении использовать соответствующие совокупности измерительных базисов. Каждая из этих совокупностей должна формироваться таким образом, чтобы обеспечивать измерение параметров действующего вектора с минимальными ошибками за счет учета особенностей взаимной ориентации осей координат этих базисов относительно направления измеряемого вектора. В связи с этим в предлагаемом способе измерения сигналов векторным измерителем со структурно-информационной избыточностью для повышения точности, как указывалось выше предусматривается введение в процесс обработки дополнительных этапов.
Ниже рассмотрен вариант трехкомпонентного векторного измерителя со структурно-информационной избыточностью, реализующий предлагаемый способ измерения сигналов векторной природы.
Структурная схема устройства (фиг. 7), реализующая предлагаемый способ измерения сигналов векторным измерителем, включает в себя блок 1 преобразователей. Общее количество (N) таких преобразователей в блоке для обеспечения структурно-информационной избыточности векторного измерителя должно быть не мене четырех. Преобразователи в блоке размещаются так, чтобы оси чувствительности их были не коллинеарны между собой и более любых двух из них не компланарны.
В качестве параметров, определяющих ориентацию осей чувствительности преобразователей в осях основного измерительного базиса векторного измерителя, используются элементы матрицы (С), которые представляют собой значения направляющих косинусов осей чувствительности i-го преобразователя относительно j-й оси основного измерительного базиса:
C = IICij II, (i = 1,2,3, . . . , N; j = 1,2,3) (10)
Для использования этих и других данных, необходимых для функционирования векторного измерителя, в его состав включается блок 2 внешней памяти, который наряду с блоком 1 преобразователей информационными шинами связан с блоком 3 распределения сигналов ( ) по соответствующим осям координат измерительных базисов векторного измерителя со структурно-информационной избыточностью. Общее число измерительных базисов определяется числом сочетаний из всех преобразователей по три известной формулой
) по соответствующим осям координат измерительных базисов векторного измерителя со структурно-информационной избыточностью. Общее число измерительных базисов определяется числом сочетаний из всех преобразователей по три известной формулой
Q =  (11)
(11)
Блок 3 распределения сигналов связан с первым вычислительным блоком 4, который в свою очередь имеет информационные связи с блоком 2 внешней памяти и с блоками мажорирования сигналов 5, их классификации 6 и блоком 8 анализа данных. Блок мажорирования своей выходной шиной связан с блоком 6 классификации сигналов. Для установления уровня порога при классификации блок 6 связан с блоком 2 внешней памяти. Управление блоком 8 анализа данных осуществляется командами от блока 6 по соответствующей линии связи. Счетчик 7 измерительных базисов без метрологических отказов также работает под управлением блока 6, а его выход подключается к второму вычислительному блоку 9. На вход блока 9 для обработки подаются сигналы компонент измеряемого вектора от базисов без метрологических отказов из блока 6 и в блок 11 для последующей классификации измерительных сигналов. Второй вычислительный блок 9 связан информационными шинами с блоком 10 вычисления суммарных углов между осями чувствительности преобразователей соответствующих измерительных базисов и измеряемым вектором. Необходимые данные об ориентации этих базисов поступают в блок 10 из блока 8 анализа. Выходная шина блока 10 подключается к блоку 11 классификации измерительных сигналов. Уровень порога для реализации процедур классификации поступает в блок 11 из блока 2 внешней памяти.
Сигналы из блока 11 для определения параметров направления измеряемого вектора поступают в блок 14 определения напряжения, а сигналы для определения модуля - в блок 15 определения модуля. Первый и второй счетчики 12 и 13, соответственно управляемые блоком 11, подключаются к блокам 14 и 15 соответственно.
Устройство, реализующее предлагаемый способ измерения сигналов, работает следующим образом.
На вход векторного измерителя (7) подаются внешние воздействия векторной природы ( ), например воздействия угловой скорости, ускорения, напряженности поля или т. п. Эти воздействия в блоке 1 устройства преобразуются в соответствующие электрические сигналы (
), например воздействия угловой скорости, ускорения, напряженности поля или т. п. Эти воздействия в блоке 1 устройства преобразуются в соответствующие электрические сигналы ( ). Сведения о параметрах ориентации осей чувствительности этих преобразователей в виде матрицы (С) направляющих косинусов осей чувствительности преобразователей относительно осей координат основного измерительного базиса предварительно размещаются в блоке 2 внешней памяти устройства.
). Сведения о параметрах ориентации осей чувствительности этих преобразователей в виде матрицы (С) направляющих косинусов осей чувствительности преобразователей относительно осей координат основного измерительного базиса предварительно размещаются в блоке 2 внешней памяти устройства.
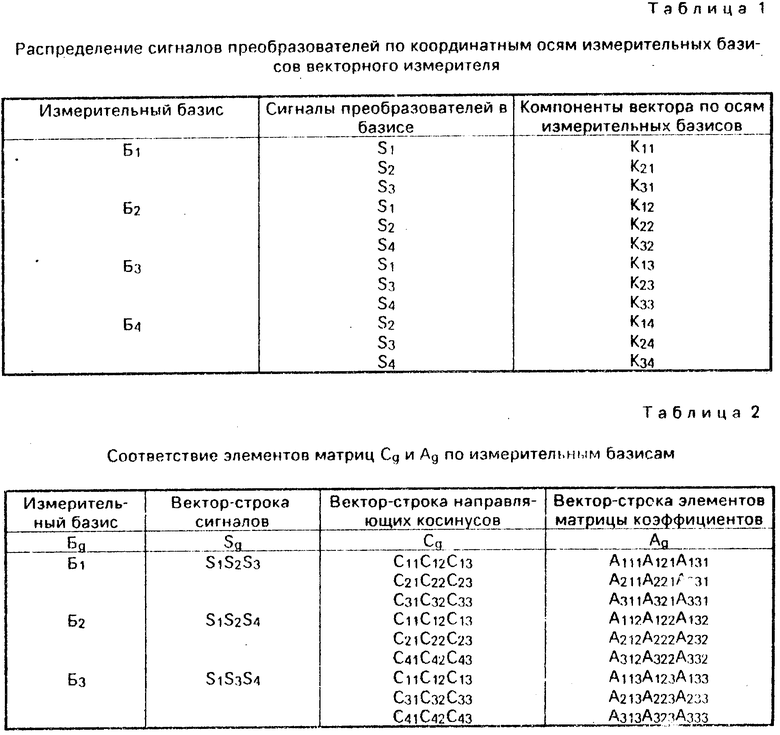
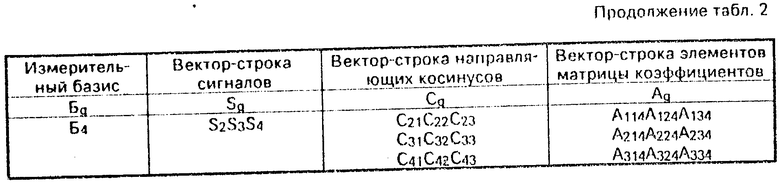
Измерительные сигналы ( ) от преобразователей поступают в блок 3, в котором они распределяются по осям измерительных базисов. Порядок коммутации сигналов в блоке 3 устанавливается на основе данных табл. 1, которая определяет связи каждого i-го из N преобразователей с m-й координатной осью соответствующего q-го измерительного базиса. Данные этой таблицы для обеспечения работы блока 3 размещаются предварительно в блоке 2 внешней памяти измерителя.
) от преобразователей поступают в блок 3, в котором они распределяются по осям измерительных базисов. Порядок коммутации сигналов в блоке 3 устанавливается на основе данных табл. 1, которая определяет связи каждого i-го из N преобразователей с m-й координатной осью соответствующего q-го измерительного базиса. Данные этой таблицы для обеспечения работы блока 3 размещаются предварительно в блоке 2 внешней памяти измерителя.
Компоненты измеряемого сигнала от всех измерительных базисов поступают в блок 4, в котором для каждого из этих базисов путем решения системы уравнений
 (12) определяются компоненты (rqm) измеряемого сигнала по сигналам преобразователей, входящих в соответствующий q-й измерительный базис.
(12) определяются компоненты (rqm) измеряемого сигнала по сигналам преобразователей, входящих в соответствующий q-й измерительный базис.
Матрица коэффициентов этой системы




 (13) для каждого q-го измерительного базиса представляет собой совокупность направляющих косинусов осей чувствительности преобразователей, входящих в q-й измерительный базис, относительно осей координат основного измерительного базиса. Формирование таких матриц из исходной матрицы направляющих косинусов (10) измерителя для решения систем уравнений (12) в блоке 4 производится с помощью специальной табл. 2, размещаемой в блоке 2 внешней памяти измерителя. Эта таблица устанавливает соответствие элементов матрицы Аq элементам исходной матрицы С в зависимости от принятого порядка коммутации сигналов преобразователей с измерительными базисами в блоке 3. Пример такой таблицы для случая четырех преобразователей с учетом назначенных связей блока 3 приводится в табл. 2. Здесь для каждого измерительного базиса в соответствии с табл. 1 приводятся векторные строки используемых сигналов преобразователей вектор-строки значений исходной матрицы направляющих косинусов (С) и соответствующие этим данным значения элементов матрицы Аq.
(13) для каждого q-го измерительного базиса представляет собой совокупность направляющих косинусов осей чувствительности преобразователей, входящих в q-й измерительный базис, относительно осей координат основного измерительного базиса. Формирование таких матриц из исходной матрицы направляющих косинусов (10) измерителя для решения систем уравнений (12) в блоке 4 производится с помощью специальной табл. 2, размещаемой в блоке 2 внешней памяти измерителя. Эта таблица устанавливает соответствие элементов матрицы Аq элементам исходной матрицы С в зависимости от принятого порядка коммутации сигналов преобразователей с измерительными базисами в блоке 3. Пример такой таблицы для случая четырех преобразователей с учетом назначенных связей блока 3 приводится в табл. 2. Здесь для каждого измерительного базиса в соответствии с табл. 1 приводятся векторные строки используемых сигналов преобразователей вектор-строки значений исходной матрицы направляющих косинусов (С) и соответствующие этим данным значения элементов матрицы Аq.
Полученные в первом вычислительном блоке 4 значения компонент (RQ) поступают на дальнейшую обработку в блоки 5 и 6. В блоке 5 реализуется процедура мажорирования поступающих компонент. В этом блоке производится упорядочение соответствующих компонент (r1q, r2q, r3q) в порядке возрастания, в результате чего получаются вариационные ряды в виде






 (14) для каждого из которых устанавливается его методика (rmz),
(14) для каждого из которых устанавливается его методика (rmz),
Результаты рассогласования сигналов относительно медианных значений их по q-у измерительному базису в блоке 5 устанавливаются с использованием выражения =
=  -
-  (15)
(15)
На основе данных, поступающих из блока 5, в блоке 6 производится классификация сигналов от измерительных базисов векторного измерителя. Классификация производится с помощью порогового устройства, в котором анализируются текущие значения рассогласований (15) с установленным порогом Δ q, значение которого предварительно фиксируется в блоке 2 внешней памяти измерителя. Если текущие значения рассогласований не превышают установленного порога, сигналы (rmq) от преобразователей, поступающие в блок 6, на выходе его формируют совокупность сигналов (Vml) от измерительных базисов без метрологических отказов. Наряду с этим в блоке 6 вырабатываются сигналы (α), с помощью которых в блоке 7 производится подсчет количества измерительных базисов без метрологических отказов. Кроме того, под управлением сигналов (β) блок 8 обеспечивает передачу значений элементов матриц Аq для тех измерительных базисов, которые не имеют метрологических отказов. На выходе блока 8 из элементов матриц Аq формируются элементы матриц Вl, которые характеризуют направление осей чувствительности преобразователей в измерительных базисах без метрологических отказов. Для соответствующего измерительного базиса такая матрица, аналогично (13), представляется в виде





 (16)
(16)
Предварительное определение параметров измеряемого сигнала по данным от базисов без метрологических отказов производится в блоке 9. В вычислительном устройстве этого блока путем усреднения определения модуль (Мl) измеряемого сигнала и вектор-строка направляющих косинусов (Ump). Обработка сигналов в блоке 9 производится с использованием соотношений
Mp= 
 (17)
(17)
U
 Vlm. (18)
Vlm. (18)
Для последующего уточнения параметров измеряемого вектора в вычислительном блоке 10 определяются параметры взаимной ориентации осей чувствительности преобразователей для каждого измерительного базиса без метрологических отказов с измеряемым сигналом. В качестве таких параметров используются значения вектор-строки суммарных углов ( ) между осями чувствительности преобразователей, входящих в l-й измерительный базис, и направлением самого измеряемого сигнала. В вычислительном устройстве блока 10 эти параметры определяются через значения соответствующих направляющих косинусов с помощью выражения
) между осями чувствительности преобразователей, входящих в l-й измерительный базис, и направлением самого измеряемого сигнала. В вычислительном устройстве блока 10 эти параметры определяются через значения соответствующих направляющих косинусов с помощью выражения =
=  arccos (umblm) (19)
arccos (umblm) (19)
Анализ взаимной ориентации преобразователей измерительных базисов с измеряемым сигналом производится в блоке 11 с помощью порогового устройства. Если текущее значение суммарного угла (19) в l-м измерительном базисе превышает его пороговое значение (γ 4), предварительно размещаемое в блоке 2, то сигналы (Vml), поступающие в блок 11, на выходе его включаются в первую группу, т. е. формируется совокупность сигналов, представленных на фиг. 7 вектор-строками  . В обратном случае формируются вектор-строки
. В обратном случае формируются вектор-строки  . Кроме того, для каждого из этих случаев в 12 и 13 производится подсчет количества измерительных базисов (k, p), данные которых формируют соответствующие совокупности (
. Кроме того, для каждого из этих случаев в 12 и 13 производится подсчет количества измерительных базисов (k, p), данные которых формируют соответствующие совокупности ( и
и  ) измерительных сигналов.
) измерительных сигналов.
По результатам измерений, включаемых в совокупности  и
и  , в блоках 14 и 15 производится переопределение как параметров направления измеряемого вектора, так и его модуля.
, в блоках 14 и 15 производится переопределение как параметров направления измеряемого вектора, так и его модуля.
Параметры направления измеряемого вектора, представляющие собой вектор-строку ( ) направляющих косинусов его в осях основного измерительного базиса, определяются в вычислительном блоке (14) устройства через свои компоненты с использованием соотношения
) направляющих косинусов его в осях основного измерительного базиса, определяются в вычислительном блоке (14) устройства через свои компоненты с использованием соотношения



 . (20)
. (20)
Модуль измеряемого сигнала, направление которого задается вектор-строкой (20), устанавливается в вычислительном блоке 15 устройства с использованием соотношения
M = 

 .
.
Выходные сигналы из блока 14 определяют параметры направления измеряемого вектора, из блока 15 - его модуль.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ БЕСПЛАТФОРМЕННОЙ ОРИЕНТАЦИИ ПОДВИЖНЫХ ОБЪЕКТОВ | 2022 |
|
RU2784859C1 |
| АВТОНОМНЫЙ КОМПЛЕКС ДЛЯ КОРРЕКЦИИ ИНЕРЦИАЛЬНЫХ СИСТЕМ ПЛАТФОРМЕННОЙ ОРИЕНТАЦИИ И НАВИГАЦИИ ПОДВИЖНЫХ ОБЪЕКТОВ | 2022 |
|
RU2826826C2 |
| СПОСОБ БЕСПЛАТФОРМЕННОЙ ИНЕРЦИАЛЬНОЙ НАВИГАЦИИ | 2022 |
|
RU2806707C1 |
| СПОСОБ АВТОНОМНОЙ ИНЕРЦИАЛЬНОЙ ОРИЕНТАЦИИ ПОДВИЖНЫХ ОБЪЕКТОВ | 2022 |
|
RU2800846C1 |
| Способ автономной ориентации объектов в околоземном пространстве | 2022 |
|
RU2787971C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ЛИНЕЙНОЙ ПЛОТНОСТИ ВОЛОКНИСТЫХ МАТЕРИАЛОВ | 1988 |
|
RU2010153C1 |
| Способ восстановления векторной информации в информационно-измерительных системах | 2020 |
|
RU2757828C1 |
| СПОСОБ АВТОНОМНОЙ ОРИЕНТАЦИИ ПОДВИЖНЫХ ОБЪЕКТОВ | 2017 |
|
RU2653967C1 |
| СПОСОБ КАЛИБРОВКИ ДАТЧИКОВ УГЛОВОЙ СКОРОСТИ БЕСПЛАТФОРМЕННОГО ИНЕРЦИАЛЬНОГО ИЗМЕРИТЕЛЬНОГО МОДУЛЯ | 2010 |
|
RU2447404C2 |
| СПОСОБ КАЛИБРОВКИ ИНЕРЦИАЛЬНОГО ИЗМЕРИТЕЛЬНОГО МОДУЛЯ ПО КАНАЛУ АКСЕЛЕРОМЕТРОВ | 2011 |
|
RU2477864C1 |

Изобретение относится к измерительной технике и может быть использовано для определения параметров движения объектов в навигации и составляющих электромагнитного и магнитного полей Земли, характеризующих газоэлектрические свойства среды при электроразведке. Целью изобретения является повышение достоверности значений формируемых величин. Цель достигается тем, что в процессе обработки сигналов векторным измерителем наряду с преобразованиями, инвариантными к измеряемому вектору, дополнительно производится уточнение параметров измеряемой векторной величины раздельно как по модулю, так и по направлению, при этом учитываются особенности взаимной ориентации осей координат измерительных базисов и измеряемого вектора. 2 табл. , 7 ил.
СПОСОБ ИЗМЕРЕНИЯ СИГНАЛОВ ВЕКТОРНЫМ ИЗМЕРИТЕЛЕМ ПРИ СТРУКТУРНО-ИНФОРМАЦИОННОЙ ИЗБЫТОЧНОСТИ, включающий измерение сигналов, пропорциональных проекциям измеряемого вектора, при помощи блока преобразователей, образующих измерительные базисы, выполненного со структурно-информационной избыточностью, определение и исключение из измеренной совокупности сигналов отказавших преобразователей, отличающийся тем, что, с целью повышения достоверности значений формируемых величин, дополнительно производят определение параметров векторной величины раздельно как по направлению, так и по модулю, в этом направлении, при этом совокупность измерительных базисов формируется с учетом влияния ориентации измерительных базисов относительно измеряемого вектора на достоверность измерений преобразователей, оси чувствительности которых образуют измерительный базис.
