Изобретение относится к области бортового приборостроения и автоматики, может быть использовано для решения задач автономной ориентации при управлении наземными, плавающими, летательными, баллистическими и космическими аппаратами в околоземном пространстве.
При решении задач пространственной ориентации подвижных объектов (ПО) в околоземном пространстве, предпочтение отдают способам автономной ориентации, соответствующим бесплатформенным и безгироскопным технологиям [1, 2]
Известен геометрический способ автономной ориентации ПО в околоземном пространстве на основе использования платформенных гироскопических технологий [3, 4].
В основу этого способа положены принципы физического воспроизведения (геометрическим путем) в пространстве двух или трех базовых направлений отсчета с помощью гироскопических систем ориентации (ГСО). Схемы построения ГСО могут предполагать реализацию различных вариантов схемотехнических и конструктивных решений [3, 4]:
- комбинации трехстепенных (свободных и корректируемых) гироскопов в кардановых подвесах (гироскопов направления, гирокомпасов, гирорбитантов, гировертикалей, геровертикантов и пр.),
- курсовертикалей гироскопических (КВГ),
- комбинации одноосных (ОГС) и двухосных (ДГС) гиростабилизаторов,
- трехосных индикаторных, силовых и индикаторно-силовых гиростабилизаторов (ТГС) с гиростабилизированными платформами (ГСП),
- систем трех и нескольких одноосных гиростабилизаторов (ОГС),
- гироазимутгоризонтов (ГАГ) на основе использования схем ОГС, ДГС, ТГС и др. Во всех вариантах построения ГСО используют принцип физического
моделирования отсчетных базисов, воспроизводимых материально с помощью трех ортов:

где  - векторы кинетических моментов и их модули для i-ых гироскопов.
- векторы кинетических моментов и их модули для i-ых гироскопов.
Для схем ГСО, построенных с учетом использования только двух гироскопов с кинетическими моментами  отсчетный базис
отсчетный базис  строят на основе следующих ортов:
строят на основе следующих ортов:

В общем случае отсчетная система координат, построенная на основе ортов 
 определяемых по формулам (1) или (2), для любой схемы ГСО представляет собой неортогональный и нестационарный базис (в силу проявления геометрических свойств кардановых подвесов и свойств астатизма гироскопов).
определяемых по формулам (1) или (2), для любой схемы ГСО представляет собой неортогональный и нестационарный базис (в силу проявления геометрических свойств кардановых подвесов и свойств астатизма гироскопов).
К недостаткам геометрического способа автономной ориентации ПО на основе использования ГСО следует отнести следующее:
- большие габариты и массы ГСО,
- необходимость проведения операций коррекций ГСО, т.к. гироскопы «уходят в пространстве» вследствие проявления их дрейфа, обусловленного свойством астатизма,
- использование ГСО на ПО накладывает некоторые ограничения на пространственные маневры объектов в силу проявления геометрических свойств выбиваемости гироскопов, обусловленных явлением «складывания рамок» кардановых подвесов.
Придание ГСО с кардановыми подвесами свойств устойчивости, невыбиваемости, пространственной всережимности и всеманевренности достигают путем усложнения схемо-технических и конструктивных решений (вводят дополнительную следящую раму, отрабатываемую в положение устойчивости гироскопа с помощью следящей системы, а также вводят коррекцию от дополнительных эталонных систем). Это усовершенствование приводит в еще большей степени к ухудшению габаритно-массовых характеристик ГСО, а также к снижению показателей технологичности, экономичности, надежности работы в эксплуатации.
Этот факт привел к тому, что в последние 20-30 лет специалисты в области управления ПО при решении задач пространственной автономной ориентации объектов предпочтение отдают бесплатформенным и бескардановым технологиям [1-5].
Известны способы пространственной автономной бесплатформенной ориентации ПО в околоземном пространстве, объединенных в единую группу способов трехмерной расширенной инерциальной ориентации (ТРИО) [1-5]. Варианты способов бесплатформенной автономной инерциальной ориентации ПО (способов ТРИО) отличаются друг от друга прежде всего способами описания геометрии и кинематики вращательного движения объекта [2, 3, 6].
В качестве исходной математической модели вращательного движения любого ПО в пространстве во всех способах ТРИО принимают кинематическое уравнение вращения твердого тела:

где  - вектор абсолютной угловой скорости вращения объекта в инерциальном пространстве, измеряемый с помощью блока гироскопов,
- вектор абсолютной угловой скорости вращения объекта в инерциальном пространстве, измеряемый с помощью блока гироскопов,
 - вектор переносной угловой скорости вращения объекта вместе с вращающейся Землей в инерциальном пространстве,
- вектор переносной угловой скорости вращения объекта вместе с вращающейся Землей в инерциальном пространстве,

 - вектор относительной угловой скорости вращения объекта относительно Земли.
- вектор относительной угловой скорости вращения объекта относительно Земли.
На основе векторного уравнения (3) формируют сначала кинематические уравнения вращательного движения ПО в пространстве, а затем интегральные алгоритмы обработки инерциальной информации для различных вариантов ТРИО, выраженные в терминах различных параметров ориентации [2, 3, 6].
Интегральный алгоритм ТРИО в терминах трехмерных параметров (эйлеровых углов) [6]:

Интегральный алгоритм ТРИО в терминах четырехмерных параметров (параметров Родрига-Гамильтона) в кватернионной и векторно-матричной формах [17]:
Интегральный алгоритм ТРИО в терминах девятимерных параметров (направляющих косинусов матрицы А (3×3) ориентации ПО) [3, 4, 6, 17]:

В алгоритмах (4) - (8) приняты следующие обозначения:
 - оценки эйлеровых углов (углов курса, тангажа (дифферента), крена(вращения), соответственно),
- оценки эйлеровых углов (углов курса, тангажа (дифферента), крена(вращения), соответственно),
 - оценки кватернионов конечного поворота и вектора
- оценки кватернионов конечного поворота и вектора 
 знак кватернионного произведения кватернионов,
знак кватернионного произведения кватернионов,
 - квадратные матрицы (4×4),
- квадратные матрицы (4×4),
 - оценка матрицы ориентации ПО (3×3),
- оценка матрицы ориентации ПО (3×3),
 - обратная матрица (3×3) при векторе
- обратная матрица (3×3) при векторе 
 - тензоры векторов
- тензоры векторов 
 - оценки начальных значений эйлеровых углов, кватерниона и матрицы ориентации, соответственно.
- оценки начальных значений эйлеровых углов, кватерниона и матрицы ориентации, соответственно.
В алгоритмах обработки информации (4) - (8) для учета оценок начальных параметров ориентации ПО во всех способах ТРИО проводят предварительно операцию начальной автономной выставки (НАВ) [1-6].
Во всех интегральных алгоритмах ориентации ПО (4) - (8) компоненты вектора угловой скорости  измеряемые с помощью трехосного блока гироскопов (ТБГ), находятся под знаком интеграла. В реальных условиях показания ТБГ содержат наряду с полезными сигналами
измеряемые с помощью трехосного блока гироскопов (ТБГ), находятся под знаком интеграла. В реальных условиях показания ТБГ содержат наряду с полезными сигналами  мультипликативные
мультипликативные  и аддитивные
и аддитивные  погрешности:
погрешности:
 )
)
Из анализа интегральных алгоритмов ориентации ПО (4) - (8) с учетом выражений (9) для реальных измерений  с помощью ТБГ видно, что всем вариантам способов ТРИО ПО характерен общий недостаток, заключающийся в накоплении погрешностей во времени, связанном с процессом интегрирования как полезных сигналов, так и ошибок гироскопов
с помощью ТБГ видно, что всем вариантам способов ТРИО ПО характерен общий недостаток, заключающийся в накоплении погрешностей во времени, связанном с процессом интегрирования как полезных сигналов, так и ошибок гироскопов 
Из-за проявления этого общего недостатка все способы инерциальной ориентации ПО имеют ограничения по времени работы БСО или нуждаются в использовании дополнительных приемов коррекции.
По этой причине усилия специалистов в области управления ПО с конца XX столетия направлены на устранение этого основного недостатка путем поиска и разработки безгироскопных способов автономной ориентации, в частности, способов автономной ориентации, основанных на обработке информации о геофизических полях (ГФП).
Известен способ автономной ориентации ПО в пространстве, основанный на формировании и обработке двухвекторной или трехвекторной информации, получаемой от пар или троек трехосных блоков гироскопов, акселерометров, магнитометров [7].
В научно-технической литературе способ получил название способа аналитического горизонт-компасирования (АГК). Способ АГК реализуют в трех вариантах:
- двухвекторном АГК на основе инерциальной информации о векторах 

- двухвекторном АГК на основе магнито-интерциальной информации о векторах 
- трехвекторном комбинированном АГК на основе объединения двухвекторных способов 
В вариантах способа АГК приняты обозначения векторов ГФП:
 - вектора напряженности поля тяжести Земли (ПТЗ),
- вектора напряженности поля тяжести Земли (ПТЗ),
 - вектора напряженности магнитного поля Земли (МПЗ),
- вектора напряженности магнитного поля Земли (МПЗ),
 - вектора угловой скорости собственного суточного вращения Земли.
- вектора угловой скорости собственного суточного вращения Земли.
Во всех трех вариантах способа АГК информацию о векторе  получаемую с помощью трехосных блоков акселерометров (ТБА), используют для решения задачи аналитического горизонтирования (АГ), т.е. задачи определения углов
получаемую с помощью трехосных блоков акселерометров (ТБА), используют для решения задачи аналитического горизонтирования (АГ), т.е. задачи определения углов  отклонения ПО от плоскости горизонта аналитическим путем на основе алгоритмической обработки информации ТБА в связанном с объектом базисе т:
отклонения ПО от плоскости горизонта аналитическим путем на основе алгоритмической обработки информации ТБА в связанном с объектом базисе т:

Компоненты вектора, отнесенного к осям географического базиса (N - направление на Север, Н - направление вертикали места, Е - направление на Восток) вычисляют на основе использования основного уравнения гравиметрии [8]:
где  - ускорение свободно падающего тела на экваторе,
- ускорение свободно падающего тела на экваторе,

а - большая полуось референц-эллипсоида фигуры Земли,
а = 6378245, м,
h -географическая высота, h = r - R,
R - средний радиус Земли, R=6378211 м,
α2 - квадрат эксцентриситета сжатия Земли,

b - малая полуось фигуры Земли, b=6356863 м,
ϕ - географическая широта точки наблюдения,
q - отношение центростремительного ускорения к ускорению на экваторе:

Ω - угловая скорость вращения Земли, 
Радиус-вектор  точки наблюдения с координатами
точки наблюдения с координатами  вычисляют по формуле:
вычисляют по формуле:

На основе компонент векторов  вычисленных по формулам (10), (11), формируют уравнение АГ:
вычисленных по формулам (10), (11), формируют уравнение АГ:

где  - матрицы (3×3) углов крена γ и тангажа ϑ.
- матрицы (3×3) углов крена γ и тангажа ϑ.
Путем решения скалярных уравнений, получаемых из векторно-матричного уравнения (15), формируют алгоритмы АГ:
После решения задачи АГ составляют уравнения аналитического компасирования (АК) для двух вариантов:
- для аналитического компасирования инерциального (АКИ),
- для магнитометрического аналитического компасирования (МАК), (g Т - АК).




где  - транспонированные матрицы (3×3) углов тангажа и крена ПО,
- транспонированные матрицы (3×3) углов тангажа и крена ПО,
 - проекции вектора
- проекции вектора  на оси связанного базиса m (определяют по показаниям трехосного блока магнитометров (ТБМ))
на оси связанного базиса m (определяют по показаниям трехосного блока магнитометров (ТБМ))
 - проекции вектора
- проекции вектора  МПЗ на оси географического базиса q (вычисляют по модели нормального МПЗ [9],
МПЗ на оси географического базиса q (вычисляют по модели нормального МПЗ [9],
 - матрица (3×3) курса ПО. Уравнения АК (17) и (18) справедливы только в режиме неподвижности (ПО (в режиме ZUPT), при котором выполняются соотношения (10) и условия для показаний ТБГ:
- матрица (3×3) курса ПО. Уравнения АК (17) и (18) справедливы только в режиме неподвижности (ПО (в режиме ZUPT), при котором выполняются соотношения (10) и условия для показаний ТБГ:

Из решений уравнений (17) и (18) получают алгоритмы АК (АКИ и МАК).
Алгоритм АКИ 

Алгоритм МАК (g Т - вариант):
Причем

Для повышения точности решения задачи АГК, а также обеспечения условий всережимности и устойчивости алгоритмов иногда способы АКИ и МАК выполняют совместно в одном способе (вариант АГК) с использованием расширенной магнито-инерциальной информации [10, 11].
Способ ориентации инклинометра в составе подземного снаряда в скважине [11] включает измерение проекции на оси связанного базиса напряженности магнитного поля феррозондами, измерение проекции ускорения свободно падающего тела акселерометрами, измерение проекции угловой скорости вращения Земли гироскопами, преобразование первичных сигналов и определение углов пространственной ориентации объекта. При этом оценивают погрешность гироскопов с привлечением информации от спутниковой навигационной системы (СНС) и корректируют величины дрейфов гироскопов с учетом информации от феррозондов. Причем при отсутствии магнитных аномалий вычисляют углы ориентации ПО по сигналам ТБМ  а при работе в средах с аномальными магнитными свойствами вычисляют параметры ориентации по сигналам
а при работе в средах с аномальными магнитными свойствами вычисляют параметры ориентации по сигналам  . Таким образом, обработку многомерной магнито-инерциальной информации
. Таким образом, обработку многомерной магнито-инерциальной информации  выполняют по схеме реконфигурации алгоритмов (g Ω -АГК или g T-АГК).
выполняют по схеме реконфигурации алгоритмов (g Ω -АГК или g T-АГК).
При отсутствии магнитных аномалий в среде реализуют схему g Т -АГК с помощью безгироскопного магнито-акселерометрического модуля (ТБМ+ТБА). При наличии же магнитных аномалий и при проявлении внешних магнитных помех реализуют автономную ориентацию по схеме g Ω-АГК с использованием только инерциальной информации (ТБА + ТБГ).
Общим недостатком способа АГК во всех вариантах (g Ω, gT и g Ω T) являются ограничения на условия использования измерительного модуля (ТБА, ТБМ, ТБГ) в виде требования выполнения режима остановки ПО (режима ZUPT).
Кроме того, алгоритмы АКИ (20) и МАК (21) вырождаются в районах географических (cosϕ = 0) и геомагнитных  полюсов, а также не обеспечивают необходимой точности решения задачи автономной ориентации в околополярных районах (с географической широтой
полюсов, а также не обеспечивают необходимой точности решения задачи автономной ориентации в околополярных районах (с географической широтой  из-за близости векторов
из-за близости векторов  к условиям квазиколлинеарности
к условиям квазиколлинеарности  В этих же районах проявляется повышенная чувствительность алгоритмов АГК к погрешностям первичных измерений
В этих же районах проявляется повышенная чувствительность алгоритмов АГК к погрешностям первичных измерений 
С учетом отмеченных недостатков способ АГК в основном нашел практическое применение для решения задач НАВ ПО в предстартовых условиях [12].
Однако и в этих случаях для повышения точности решения задачи автономной ориентации ПО необходимо минимизировать погрешности в магнитометрическом  и инерциальном
и инерциальном  каналах измерений.
каналах измерений.
Известен способ автономной пространственной ориентации (АПО) ПО, заключающейся в составлении матричного уравнения, характеризующего преобразование векторов ГФП  из географического базиса
из географического базиса  в связанный с объектом базис
в связанный с объектом базис  и в последующем решении этого уравнения с целью формирования алгоритмов обработки многомерной геофизической информации (ГФИ) и преобразования ее в пилотажно-навигационную информацию (ПНИ) о параметрах ориентации объекта [13].
и в последующем решении этого уравнения с целью формирования алгоритмов обработки многомерной геофизической информации (ГФИ) и преобразования ее в пилотажно-навигационную информацию (ПНИ) о параметрах ориентации объекта [13].
Способ оперирует с информацией о векторах ГФП  и поэтому назван способом ориентации векторным автономным (СОВА).
и поэтому назван способом ориентации векторным автономным (СОВА).
По доступной информации предварительно вычисляют векторы ПТЗ  МПЗ
МПЗ  и поля вращения Земли
и поля вращения Земли  в географическом q и m связанном базисах
в географическом q и m связанном базисах

Вектор  вычисляют с учетом результатов предварительно выполненных метрологических тарировок и технологических калибровок в соответствии с расширенным уравнением Пуассона [14]:
вычисляют с учетом результатов предварительно выполненных метрологических тарировок и технологических калибровок в соответствии с расширенным уравнением Пуассона [14]:

где  - вектор напряженности результирующего магнитного поля, сформированного по показаниям ТБМ и приведенного к осям приборного отсчетного базиса р.
- вектор напряженности результирующего магнитного поля, сформированного по показаниям ТБМ и приведенного к осям приборного отсчетного базиса р.
 - вектор напряженности МПЗ в точке наблюдения, приведенный к географическому базису q,
- вектор напряженности МПЗ в точке наблюдения, приведенный к географическому базису q,
 - компоненты вектора напряженности магнитного поля объекта (МПО), отнесенного к осям связанного базиса m,
- компоненты вектора напряженности магнитного поля объекта (МПО), отнесенного к осям связанного базиса m,
 - аналогичные компоненты вектора, обусловленного влиянием электромагнитных источников (ЭМИ) помех,
- аналогичные компоненты вектора, обусловленного влиянием электромагнитных источников (ЭМИ) помех,
 - единичная матрица (3×3),
- единичная матрица (3×3),
 - матрица коэффициентов Пуассона (3×3),
- матрица коэффициентов Пуассона (3×3),
 - матрица погрешностей сборки ТБМ (3×3),
- матрица погрешностей сборки ТБМ (3×3),
 - матрица погрешностей монтажа ТБМ на объекте (3×3).
- матрица погрешностей монтажа ТБМ на объекте (3×3).
Компоненты векторов  в осях географического q базиса вычисляют с учетом данных СНС
в осях географического q базиса вычисляют с учетом данных СНС  по моделям нормальных ГФП [8, 9, 14]:
по моделям нормальных ГФП [8, 9, 14]:
Геомагнитный потенциал представляют с помощью сферических рядов Гаусса [8]:

где m, n - степень и порядок членов разложения,
 - присоединенные функции Лежандра.
- присоединенные функции Лежандра.
На основе навигационной информации (ϕ, λ, h), получаемой от СНС, вычисляют компоненты вектора кажущегося ускорения  в географическом базисе [1, 2]:
в географическом базисе [1, 2]:
где rϕ, rλ радиусы кривизны эквидистантного референц-эллипсоида [8].
Компоненты вектора  определяют на основе данных СНС [1, 2]:
определяют на основе данных СНС [1, 2]:

Вектор  определяют путем численного дифференцирования.
определяют путем численного дифференцирования.
Расширяют ГФИ за счет вычисления на основе способа восстановления векторной информации [15] вектора  в связанном базисе, а также путем вычисления дополнительных векторов [13] в базисах m и q:
в связанном базисе, а также путем вычисления дополнительных векторов [13] в базисах m и q:

На основе вычисленных по формулам (11) - (13), (26) - (33), (3), (23) векторов составляют матричное уравнение АПО в условиях функциональной избыточности информации:
В соответствии с принципом декомпозиции разбивают матричное уравнение (34) на частные матричные уравнения идентификации с квадратными матрицами (3) вида:

где  - матрица приборной информации и ГФИ в связанном базисе m (3×3),
- матрица приборной информации и ГФИ в связанном базисе m (3×3),
 - матрица идентификации (3×3) для k-ого варианта.
- матрица идентификации (3×3) для k-ого варианта.
Максимально возможное число вариантов построения матричных уравнений идентификации вида (35) составляет

Для практических целей из соображений экономии объема оперативной памяти бортового вычислителя достаточно использовать ограниченное число вариантов 
 например,
например, 
Алгоритмы АПО для способа СОВА получают путем обращения уравнений идентификации (35):

По алгоритмам АПО (37) вычисляют оценки направляющих косинусов  матрицы ориентации
матрицы ориентации  для к-ого варианта.
для к-ого варианта.
Используют операцию сравнения оценок (37) и вычисления выровненной оценки матрицы ориентации 

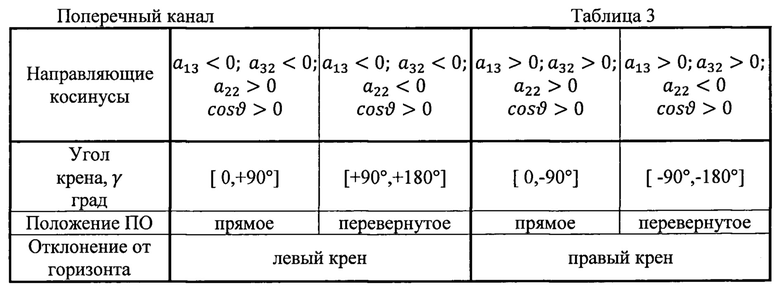
По вычисленным значениям направляющих косинусов матрицы ориентации определяют оценки эйлеровых углов по формулам [13]:
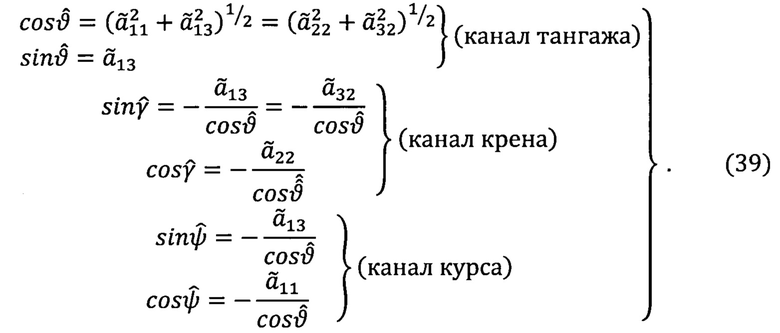
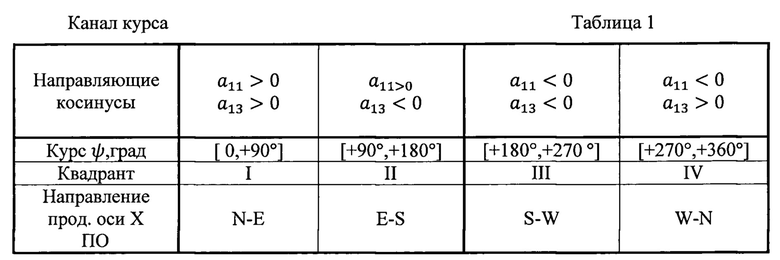
Значения, знаки оценок вычисленных эйлеровых углов 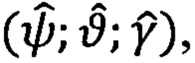 а также положение ПО относительно осей географического базиса (q=NHE) определяют с помощью табл.1, 2, 3.
а также положение ПО относительно осей географического базиса (q=NHE) определяют с помощью табл.1, 2, 3.
Для формирования первичной приборной информации  в способе СОВА используют три блока векторных ДПИ-ТБА, ТБГ, ТБМ. На основе этой ППИ могут быть реализованы трехвекторные и двухвекторные алгоритмы отработки информации (23) - (39). За счет этого реализуют условия функциональной избыточности информации, обеспечивающие свойства отказоустойчивости СОН и ее работоспособность в резервно-аварийных режимах (РАР). При этом допускается отказ любого блока или любых датчиков в пределах одного блока без потери работоспособности в РАР.
в способе СОВА используют три блока векторных ДПИ-ТБА, ТБГ, ТБМ. На основе этой ППИ могут быть реализованы трехвекторные и двухвекторные алгоритмы отработки информации (23) - (39). За счет этого реализуют условия функциональной избыточности информации, обеспечивающие свойства отказоустойчивости СОН и ее работоспособность в резервно-аварийных режимах (РАР). При этом допускается отказ любого блока или любых датчиков в пределах одного блока без потери работоспособности в РАР.
Достоинством способа СОВА является и то, что для его реализации не требуется выполнять операции начальной автономной выставки (НАВ) СОН. Недостатки способа СОВА:
- применение ТБГ приводит к снижению точности решения задачи автономной ориентации из-за проявления дрейфа гироскопов,
- сложность алгоритмов обработки информации с учетом функциональной избыточности информации в способе СОВА повышает требования к вычислительным характеристикам микроконтроллера (быстродействию, длине разрядной сетки, информационной производительности).
Известен безгироскопный способ полуавтономной двухвекторной ориентации ПО в пространстве, основанный на комплексном использовании: спутниковой навигационной  магнитометрической
магнитометрической  и инерциальной
и инерциальной  информации [16].
информации [16].
Этот способ наиболее близок к заявленному способу и поэтому принят за прототип.
В магнито-инерциально-спутниковом способе (МИСС DIADA) задачу полуавтономной ориентации ПО решают на основе комплексной обработки двухвекторной  и спутниковой
и спутниковой  информации (по аналогии со способом векторного согласования TRIAD А).
информации (по аналогии со способом векторного согласования TRIAD А).
Сущность способа МИСС DIADA заключается в вычислении на основе первичной магнито-инерциальной информации  оценок направляющих косинусов
оценок направляющих косинусов 
 матрицы
матрицы  ориентации ПО с последующим определением эйлеровых углов
ориентации ПО с последующим определением эйлеровых углов  Способ МИСС DIADA является частным случаем способа СОВА [13]. К достоинствам способа МИСС DIADA следует отнести следующее:
Способ МИСС DIADA является частным случаем способа СОВА [13]. К достоинствам способа МИСС DIADA следует отнести следующее:
- отсутствие в ППИ сигналов ТБГ с дрейфом гироскопов способствует повышению показателя точности решения задачи ориентации ПО,
- обработка информации по алгоритмам МИСС DIADA может быть включена и выключена в любой момент времени работы системы ориентации без предварительного выполнения операций НАВ.
Недостатки способа МИСС DIADA:
- способ МИСС DIADA не обеспечивает условия для повышения точности решения задачи ориентации ПО вследствие того, что магнитометрический канал (от ТБМ) построен по грубым алгоритмам, не учитывающим влияние дестабилизирующих факторов, связанных с магнитным полем объекта (МПО) и электромагнитными источниками (ЭМИ) помех, а также связанных с технологическими погрешностями сборки и монтажа ТБМ,
- в алгоритмах обработки информации в способе МИСС DIADA на основе ортов  строят не географический отсчетный базис
строят не географический отсчетный базис  а условный повернутый относительно базиса q трехгранник, с осями, направления которых определяют с помощью ортов, не совпадающих с ортами
а условный повернутый относительно базиса q трехгранник, с осями, направления которых определяют с помощью ортов, не совпадающих с ортами  :
:

- возможно нарушение работы МК вследствие того, что в алгоритмах обработки информации по способу МИСС DIADA используют операцию вычисления функции тангенса  склонной к разрыву
склонной к разрыву 
- система ориентации, построенная по способу МИСС DIADA, не обладает повышенными показателями надежности и отказоустойчивости в РАР из-за отсутствия условия функциональной избыточности информации.
Вместе с тем, реализация двухвекторного способа МИСС DIADA с учетом устранения отмеченных недостатков создает предпосылки для разработки малогабаритной двублочной (ТБА, ТБМ) безгироскопной полуавтономной бесплатформенной системы ориентации (БСО). Практическое использование такой безгироскопной БСО весьма привлекательна и эффективна как в производстве (технологичность, экономичность), так и в эксплуатации (надежность, малогабаритность и миниатюрность), особенно для БЛА.
В задачу настоящего изобретения входит разработка способа автономной бесплатформенной ориентации ПО в околоземном пространстве, свободного от недостатков аналогов и прототипа.
Решение поставленной задачи достигают за счет усовершенствования способа обработки магнито-инерциально-спутниковой информации (МИС-информации):
- путем усовершенствования алгоритмов обработки информации в магнитометрическом канале, с целью учета технологических особенностей ТБМ и магнитных свойств самого ПО,
- за счет разработки более совершенных и эффективных алгоритмов обработки МИС-информации в соответствии с технологией алгоритмического обеспечения автономной пространственной ориентации (АПО) [13].
Предлагаемый способ решения задачи автономной ориентации ПО в околоземном пространстве авторы назвали «магнито-инерциальным методом определения значений А» (МИМОЗА) в связи с тем, что он позволяет определить девятимерные параметры ориентации -направляющие косинусы матрицы ориентации А.
Сущность предлагаемого способа (МИМОЗА) заключается определении оценок направляющих косинусов матрицы ориентации  ПО путем комплексной обработки МИС-информации с учетом технологических особенностей магнито-метрического канала с последующим вычислением оценок эйлеровых углов
ПО путем комплексной обработки МИС-информации с учетом технологических особенностей магнито-метрического канала с последующим вычислением оценок эйлеровых углов  ориентации объекта по невыбиваемым всережимным алгоритмам.
ориентации объекта по невыбиваемым всережимным алгоритмам.
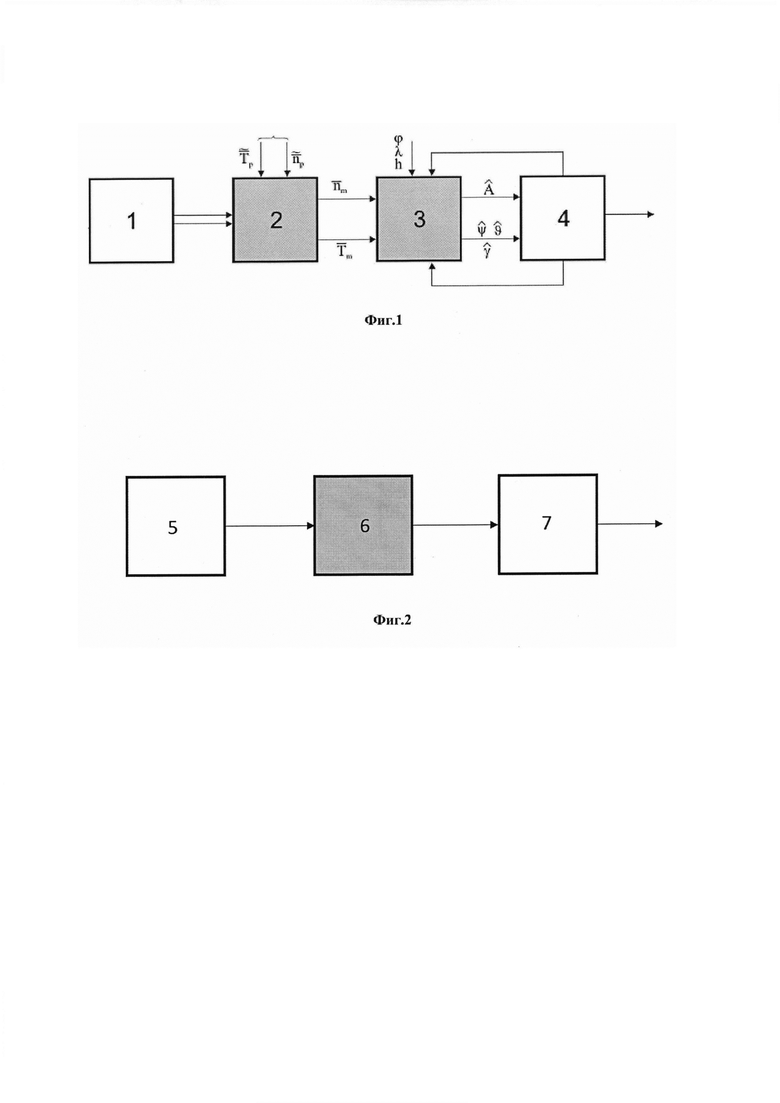
Предлагаемый способ поясняется с помощью Фиг. 1, 2. На Фиг. 1 представлена функциональная схема способа МИМОЗА,
1 - блок операций технологических (инструментальных и объектовых) калибровок,
2 - блок операций формирования и преобразования первичной приборной информации (ППИ),
3 - блок вычислительных операций в МК по алгоритмам МИМОЗА,
4 - блок вычислительных операций в МК по алгоритмам КАСКАД.
На ФИГ.2 представлена схема алгоритмического обеспечения способа МИМОЗА.
5 - алгоритмы технологического обеспечения модуля (АТОМ),
6 - алгоритмы обработки МИС-информации (МИМОЗА),
7- комплексные алгоритмы самоконтроля и комбинированной автономной диагностики (КАСКАД).
Сущность способа МИМОЗА заключается в последовательном выполнении операций измерений, формирования ППИ и ее комбинированной обработки (ФИГ. 1, 2):
1. Заранее (до старта ПО) выполняют операции метрологических тарировок и технологических калибровок магнито-метрического и инерциального каналов измерений (поз. 1 на Фиг. 1). Технологические операции выполняют по методике, описанной в научно-технической литературе [14].
Обработку технологической информации (ТИ) выполняют по алгоритмам технологического обеспечения модуля (АТОМ) (поз.5 на Фиг. 2).
2. На основе результатов измерений векторов  в приборном измерительном базисе
в приборном измерительном базисе  с учетом данных технологических калибровок выполняют операции коррекции показаний блоков (ТБА, ТБМ) и приведения их к ортонормированным осям связанного базиса m=XYZ [13, 14] (поз.2 на Фиг. 1):
с учетом данных технологических калибровок выполняют операции коррекции показаний блоков (ТБА, ТБМ) и приведения их к ортонормированным осям связанного базиса m=XYZ [13, 14] (поз.2 на Фиг. 1):
где  - транспортированная матрица монтажа модуля на объекте,
- транспортированная матрица монтажа модуля на объекте,
 - обратные матрицы сборки ТБМ и ТБА, соответственно.
- обратные матрицы сборки ТБМ и ТБА, соответственно.
3. Выполняют основные операции обработки МИС-информации по алгоритмам МИМОЗА (поз.3 на Фиг. 1, поз.6 на Фиг. 2).
Вычисляют компоненты векторов  в географическом базисе q по формулам (27)-(32) с учетом использования навигационной информации от СНС
в географическом базисе q по формулам (27)-(32) с учетом использования навигационной информации от СНС 
Вычисляют дополнительный вектор

в связанном (т) и географическом (q) базисах:

С учетом вычисленных векторов составляют основное уравнение способа МИМОЗА в матричной форме:

Или в компактных формах:

где Р- матрица приборной информации, N -матрица идентификации (3×3).
Матрицу ориентации ПО А определяют через направляющие косинусы 
 углов между ортами связанного
углов между ортами связанного  и географического
и географического  базисов:
базисов:

Путем обращения матричного уравнения (45) (или (46), (47)) получают основной алгоритм обработки информации с целью вычисления оценки матрицы ориентации  по способу МИМОЗА:
по способу МИМОЗА:

где  - обратная и союзная матрицы,
- обратная и союзная матрицы,
det N - детерминант матрицы идентификации N.
Проверяют выполнение условия невырожденности матрицы идентификации N:

По формулам (39) и табл.1-3 вычисляют оценки эйлеровых углов  и определяют их знаки.
и определяют их знаки.
4. Выполняют контрольные и нормирующие операции (поз.4 на Фиг. 1) по комплексным алгоритмам самотестирования и комбинированной автономной диагностики (КАСКАД) (поз.7 на Фиг. 2):
Аналогичным образом выполняют контрольные операции над компонентами дополнительных векторов (33).
Проверку правильности вычисления оценок параметров ориентации ПО выполняют по алгоритмам автономного контроля и нормировки (АКН) [17]:
По результатам выполнения операций АКН по алгоритмам КАСКАД в заключение производят операции коррекции и нормировки результатов вычислений в блоке поз.3 (Фиг. 1) [17].
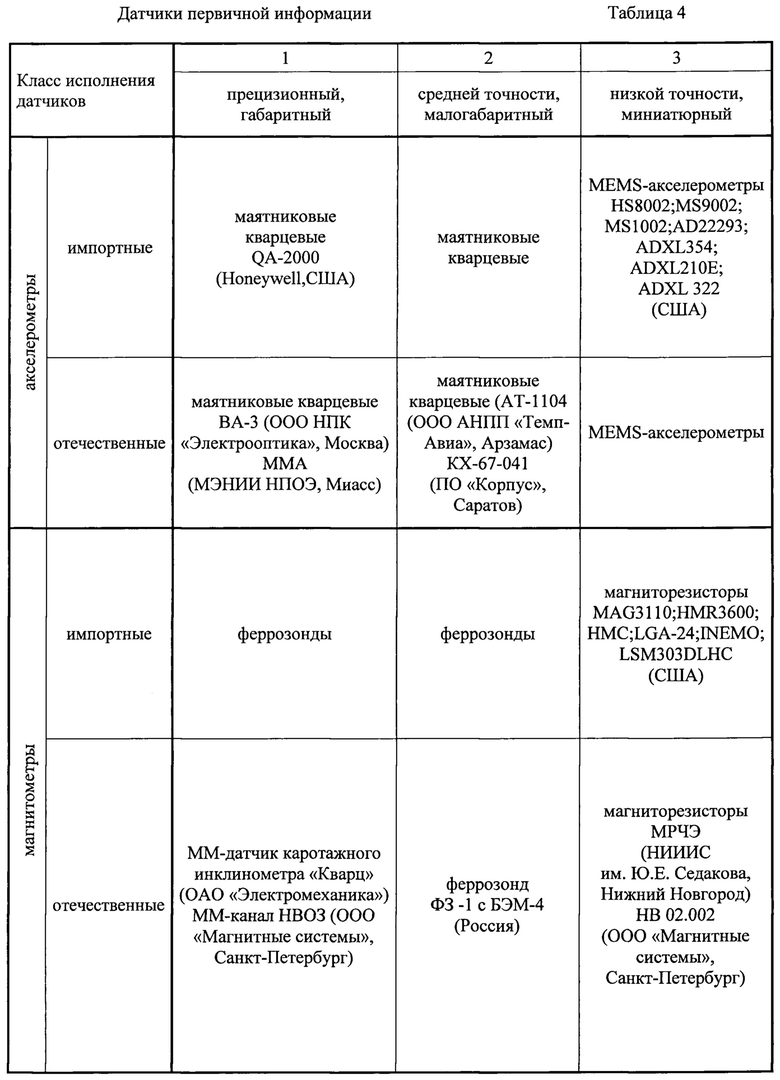
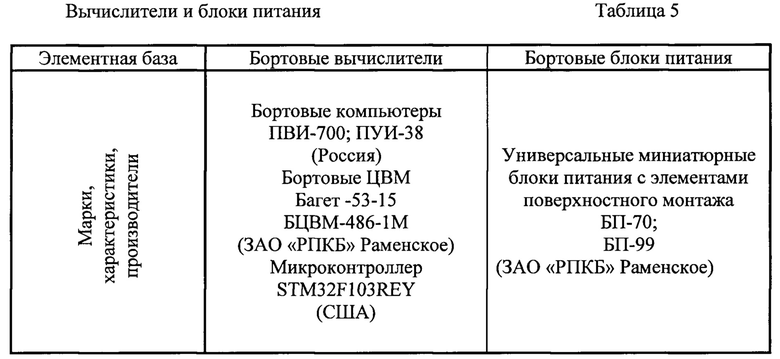
Практическая реализация предлагаемого способа МИМОЗА может быть выполнена как на импортной, так и на отечественной элементной базе (табл.4,5).
Численные оценки расчетным путем показывают, что для реализации бесплатформенной системы ориентации (БСО) на основе предлагаемого способа с допустимыми погрешностями ориентации ПО в пространстве в пределах 10'…20' достаточно использовать в составе БСО блоки векторных датчиков, имеющих инструментальные погрешности и разрешающие способности не хуже пороговых значений:

что соответствует уровню достижимых показателей для существующих (табл.4), а тем более для перспективных векторных датчиков.
Длина разрядной сетки МК в 24 бит, необходимая для обеспечения вычислительных операций при обработке информации с гарантированной точностью решения задачи автономной ориентации (с допустимой погрешностью и разрешающей способностью не хуже 1") предполагает:
- измерение компонент вектора  с помощью ТБМ с допустимой погрешностью
с помощью ТБМ с допустимой погрешностью  (с точностью до второго знака после запятой),
(с точностью до второго знака после запятой),
- измерение компонент вектора n с помощью ТБА с допустимой погрешностью  (с точностью до пятого знака после запятой),
(с точностью до пятого знака после запятой),
- вычисление в МК функций эйлеровых углов с допустимой погрешностью, не превышающей 0,001%(с точностью до шестого знака после запятой).
Для сравнения следует указать на то, что в современных цифровых пилотажно-навигационных комплексах обработку информации выполняют с длиной разрядной сетки в 16... 32 знака.
Определение потребной частоты обновления информации связано с оценкой динамических свойств ПО, на котором предполагают реализовать БСО в соответствии с предлагаемым способом. Численный анализ показывает, что для самого динамичного канала крена (вращения) ПО частота обновления информации в БСО должна удовлетворять условию:

При допустимой погрешности δγ = 1'' для высокоманевренного ПО 
 частота
частота  Для маломаневренных ПО эта частота обновления информации в БСО
Для маломаневренных ПО эта частота обновления информации в БСО  может быть снижена на 1…2 порядка. Частота обновления информации в пилотажном
может быть снижена на 1…2 порядка. Частота обновления информации в пилотажном  и навигационном
и навигационном  должны удовлетворять условию согласования:
должны удовлетворять условию согласования:

При частоте обновления навигационной информации  (от СНС) условие (55) выполняется с большим запасом.
(от СНС) условие (55) выполняется с большим запасом.
С другой стороны, шаговая частота информации в  должна быть согласована с тактовой частотой
должна быть согласована с тактовой частотой  обработки приборной, геофизической и пилотажно-навигационной информации в МК:
обработки приборной, геофизической и пилотажно-навигационной информации в МК:

При выборе современных бортовых вычислителей (табл.4) условие (56)выполняется.
Немаловажным фактом в пользу предлагаемого способа бесплатформенной автономной ориентации ПО в пространстве является тот факт, что этот способ не накладывает никаких ограничений на выбор места установки ТБМ на объекте. В соответствии с требованиями отраслевого стандарта (ОСТ 1 00374-80 «Датчики магнитного курса. Требования к размещению на самолетах и вертолетах») в авиации существуют ограничения на выбор места установки на летательных аппаратах магнитометрических датчиков. Аналогичные ограничения существуют в морском флоте и ракетно-космической технике. Более того, для снижения уровня намагниченности плавающих аппаратов в морском флоте широко используют технологию размагничивания кораблей и подводных лодок.
В соответствии с алгоритмами обработки магнитометрической информации (41) в предлагаемом способе МИМОЗА учитывают не только магнитные и электромагнитные свойства ПО, но и погрешности сборки ТБМ и ошибки его монтажа на объекте.
Кроме того, в соответствии с алгоритмами беслатформенной обработки информации (37Н39), (табл.1-3)
- сняты всякие ограничения на условия выполнения пространственных маневров ПО (т.е. обеспечиваются условия всеманевренности и всережимности работы БСО),
- не требуется предварительное выполнение операций начальной автономной выставки (НАВ).
Для БСО, реализующей алгоритмы МИМОЗА, важно выполнить три режима работы в 3 этапа:
- режим (этап) технологической подготовки,
- штатный режим (этап) работы,
- режим (этап) самотестирования и самодиагностики.
В конструктивном отношении БСО, реализующая способ МИМОЗА, может быть построена по одному их трех вариантов:
- в виде единого моноблока (модуля),
- в виде набора отдельных блоков,
- в смешанном варианте.
Вычислитель БСО может быть реализован по схеме, встроенной в измерительный модуль конструкции или в виде отдельного вычислительного блока.
Особенность практической реализации предлагаемого изобретения заключается в том, что аппаратную часть системы выбирают исходя из конкретных требований, связанных с типом объекта, средой и условиями его применения, а достижение системой соответствующих функций обеспечивают за счет сменного универсального программно-алгоритмического обеспечения. Это означает, что предлагаемый способ может быть реализован как в существующих БСО, так и в проектируемых и перспективных разработках.
Анализ отечественной и зарубежной научно-технической литературы, и патентных источников за последние 30 лет показывает, что альтернативы предлагаемому изобретению в настоящее время не существует, а сам предлагаемый способ бесплатформенной автономной ориентации ПО обладает необходимыми признаками новизны, актуальности и перспективности.
Перечень литературных и патентных источников
1. Матвеев В.В., Распопов В.Я. Основы построения бесплатформенных инерциальных навигационных систем/Под общ. ред. д.т.н. В.Я. Распопова. - СПб.: ГНЦ РФ ОАО «Концерн «ЦНИИ «Электроприбор», 2009, -280 с.
2. Ориентация и навигация подвижных объектов. Современные информационные технологии/Под общ. ред. Б.С.Алешина, К.К. Верееменко, А.И. Черноморского. -М.: Физматлит, 2006. - 424 с.
3. Репников А.В., Сачков Г.П., Черноморский А.Н. Гироскопические системы: Учеб. пособие для авиац. вузов/Под ред. д.т.н. А.В. Репникова. -М.: Машиностроение, 1983. -319 с.
4. Рахтеенко Е.Р.Гироскопические системы ориентации. - М.: Машиностроение, 1989.-232 с.
5. Микромеханические датчики и системы. Практические результаты и перспективы развития /XII Санкт-Петербургская международная конференция по интегрированным навигационным системам-СПб.: ГНЦ РФ ОАО «Концерн «ЦНИИ «Электроприбор», 2005, -С.262-275.
6. Проскуряков Г.М., Плотников П.К. Геометрия и кинематика пространственного состояния подвижных объектов: учебн. пособие/Сарат.техн. ун-т, Саратов, 2008. -155 с.
7. Шведов А.П. Комлексирование магнитометрических и инерциальных систем ориентации/А.П. Шведов, Ю.В. Иванов, Д.М. Малютин, Р.В. Алалуев, М.Г. Погорелов//Справочник. Инженерный журнал. Приложение №6,2010 г. -С 15-19.
8. Руководство по Всемирной геодезической системе - 1984 (WGS-84)/-Международная организация гражданской авиации IKAO, изд.2ое,2002, DOC 9674.
9. International Geomagnetic Reference Field IGRF WMM-20, URL: // www.ngdc.noaa.gov/com (дата обращения: 20.12.2021).
10. Силкин А.А. Синтез и анализ алгоритмов определения пространственной ориентации беспилотной аэродинамической платформы по измерениям магнитного поля Земли/диссерт.на соиск.уч. степени канд. техн. наук/Инст.машиноведения им.А.А. Благонравова РАН. -М.,2002.
11. Пат RU №2503 810 МПК Е21 В 47/22. Способ автономной ориентации инклинометра в скважине, опубл. 10.01.2014.
12. Биндер Я.И. Падерина Т.В. Бесплатформенный инерциальный измерительный модуль: компасирование и калибровка на подвижном основании в условиях ограничения угловых перемещений /Гироскопия и навигация, №4 2003, С.30-40.
13. Патент RU №2653967 С1 МПК G 01 21/00 Способ автономной ориентации подвижных объектов /авторы: Проскуряков Г.М. и др./Патентообладатель-ФГБОУ ВО Сарат.госуд. техн. ун-т им. Гагарина Ю.А. от 20.06.2017, опубл.15.05.2018, Бюлл. №14.
14. Игнатьев А.А., Проскуряков Г.М. Гетеромагнитометрия: алгоритмы, методики, калибровки блоков магнитометров. Саратов: Изд-во Сарат.ун-та, 2014. -152 с.
15. Патент RU №2757828 МПК G05D 1/00; G 05 В23/00; G06F 11/00. Способ восстановления векторной информации в информационно-измерительных системах /авторы: Проскуряков Г.М., Голованов П.Н., Пыльский В.А./Патентообладатель -ФГБОУ ВО Сарат.госуд. техн. ун-т им. Гагарина Ю.А. от 15.12.2020, опубл.21.10.2021, Бюлл. №30.
16. Корюкин М.С.Построение алгоритмов функционирования интегрированной с СНС безгироскопной системы ориентации летательного аппарата (материалы VII конференции молодых ученых «Навигация и управление движением»/Под общ. ред. акад. РАН В, Г. Пешехонова, - СПб.: ГНЦ РФ ОАО «Концерн «ЦНИИ «Электроприбор», 2006, -С.282-287.
17. Бранец В.Н. Лекции по теории бесплатформенных инерциальных навигационных систем управления: Учеб. пособие. -М.: МФТИ,2009. -304 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ АВТОНОМНОЙ ИНЕРЦИАЛЬНОЙ ОРИЕНТАЦИИ ПОДВИЖНЫХ ОБЪЕКТОВ | 2022 |
|
RU2800846C1 |
| СПОСОБ БЕСПЛАТФОРМЕННОЙ ОРИЕНТАЦИИ ПОДВИЖНЫХ ОБЪЕКТОВ | 2022 |
|
RU2784859C1 |
| АВТОНОМНЫЙ КОМПЛЕКС ДЛЯ КОРРЕКЦИИ ИНЕРЦИАЛЬНЫХ СИСТЕМ ПЛАТФОРМЕННОЙ ОРИЕНТАЦИИ И НАВИГАЦИИ ПОДВИЖНЫХ ОБЪЕКТОВ | 2022 |
|
RU2826826C2 |
| СПОСОБ БЕСПЛАТФОРМЕННОЙ ИНЕРЦИАЛЬНОЙ НАВИГАЦИИ | 2022 |
|
RU2806707C1 |
| Способ восстановления векторной информации в информационно-измерительных системах | 2020 |
|
RU2757828C1 |
| СПОСОБ АВТОНОМНОЙ ОРИЕНТАЦИИ ПОДВИЖНЫХ ОБЪЕКТОВ | 2017 |
|
RU2653967C1 |
| СПОСОБ ПЕРСОНАЛЬНОЙ АВТОНОМНОЙ НАВИГАЦИИ | 2013 |
|
RU2523753C1 |
| Способ автономной ориентации подвижного объекта с помощью инерциального измерительного модуля | 2019 |
|
RU2738342C1 |
| СПОСОБ ПОВЫШЕНИЯ ТОЧНОСТИ БЕСПЛАТФОРМЕННОЙ ИНЕРЦИАЛЬНОЙ СИСТЕМЫ ОРИЕНТАЦИИ НА ОСНОВЕ ТРЕХОСНЫХ ВОЛОКОННО-ОПТИЧЕСКИХ ГИРОСКОПОВ С ОДНИМ ОБЩИМ ИСТОЧНИКОМ ИЗЛУЧЕНИЯ | 2011 |
|
RU2502048C2 |
| СПОСОБ ИДЕНТИФИКАЦИИ СМЕЩЕНИЙ ОСЕВОЙ ЛИНИИ ТРУБОПРОВОДА | 2016 |
|
RU2621219C1 |
Изобретение относится к способу бесплатформенной автономной ориентации подвижных объектов в околоземном пространстве. Для ориентации подвижных объектов формируют первичную приборную информацию о векторе кажущегося ускорения  и векторе напряженности результирующего магнитного поля
и векторе напряженности результирующего магнитного поля  по сигналам предварительно откалиброванных трехосных блоков акселерометров и магнитометров, а также на последующей обработке этой информации с учетом использования навигационной информации, получаемой от спутниковой навигационной системы, корректируют их с учетом результатов предварительно выполненных технологических калибровок, приводят к осям ортонормированного базиса m=XYZ, связанного с объектом
по сигналам предварительно откалиброванных трехосных блоков акселерометров и магнитометров, а также на последующей обработке этой информации с учетом использования навигационной информации, получаемой от спутниковой навигационной системы, корректируют их с учетом результатов предварительно выполненных технологических калибровок, приводят к осям ортонормированного базиса m=XYZ, связанного с объектом  затем на основе использования навигационной информации от спутниковой навигационной системы вычисляют компоненты векторов поля тяжести Земли
затем на основе использования навигационной информации от спутниковой навигационной системы вычисляют компоненты векторов поля тяжести Земли  геомагнитного поля
геомагнитного поля  и кажущегося ускорения
и кажущегося ускорения  приведенных к осям базиса q, и наконец, по скорректированным и приведенным к базисам m и q векторам
приведенных к осям базиса q, и наконец, по скорректированным и приведенным к базисам m и q векторам  определяют параметры ориентации объекта с использованием безынтегральных алгоритмов бесплатформенной обработки векторной информации. Обеспечивается повышение точности решения задач ориентации подвижных объектов. 2 ил., 5 табл.
определяют параметры ориентации объекта с использованием безынтегральных алгоритмов бесплатформенной обработки векторной информации. Обеспечивается повышение точности решения задач ориентации подвижных объектов. 2 ил., 5 табл.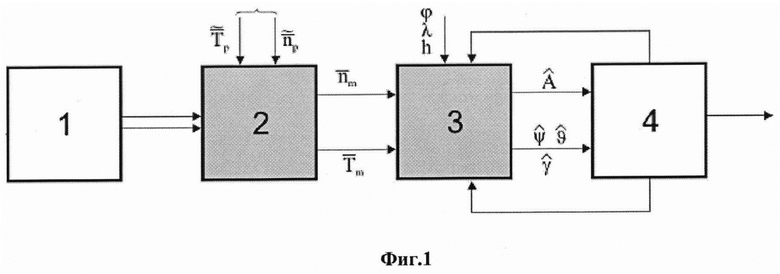
Способ бесплатформенной автономной ориентации подвижных объектов в околоземном пространстве, основанный на формировании первичной приборной информации о векторе кажущегося ускорения  и векторе напряженности результирующего магнитного поля
и векторе напряженности результирующего магнитного поля  по сигналам предварительно откалиброванных трехосных блоков акселерометров и магнитометров, а также на последующей обработке этой информации с учетом использования навигационной информации, получаемой от спутниковой навигационной системы, с целью определения параметров ориентации объекта, отличающийся тем, что сначала на основе способа восстановления векторной информации измеренные векторы
по сигналам предварительно откалиброванных трехосных блоков акселерометров и магнитометров, а также на последующей обработке этой информации с учетом использования навигационной информации, получаемой от спутниковой навигационной системы, с целью определения параметров ориентации объекта, отличающийся тем, что сначала на основе способа восстановления векторной информации измеренные векторы  корректируют с учетом результатов предварительно выполненных технологических калибровок и приводят к осям ортонормированного базиса m=XYZ, связанного с объектом
корректируют с учетом результатов предварительно выполненных технологических калибровок и приводят к осям ортонормированного базиса m=XYZ, связанного с объектом  затем на основе использования навигационной информации от спутниковой навигационной системы вычисляют компоненты векторов поля тяжести Земли
затем на основе использования навигационной информации от спутниковой навигационной системы вычисляют компоненты векторов поля тяжести Земли  геомагнитного поля
геомагнитного поля  и кажущегося ускорения
и кажущегося ускорения  приведенных к осям базиса q, и наконец, по скорректированным и приведенным к базисам m и q векторам
приведенных к осям базиса q, и наконец, по скорректированным и приведенным к базисам m и q векторам  определяют параметры ориентации объекта с использованием безынтегральных алгоритмов бесплатформенной обработки векторной информации.
определяют параметры ориентации объекта с использованием безынтегральных алгоритмов бесплатформенной обработки векторной информации.
| Способ определения углов пространственной ориентации | 2016 |
|
RU2713078C1 |
| Способ спутниковой гравитационной градиентометрии | 2020 |
|
RU2745364C1 |
| Способы формирования данных об ориентации объекта и навигационный комплекс летательного аппарата для их реализации | 2020 |
|
RU2745083C1 |
| WO 2020252575 A1, 24.12.2020 | |||
| US 9817102 B1, 14.11.2017. | |||

