первой каретки по оси ординат, механический привод с датчиком 6 перемещений второй каретки по оси абсцисс, следящий электропривод 7 перемещения второй каретки по оси ординат, блок обработки информации и координатограф 8. Блок обработки информации выполнен с вычислителем 9, двумя демультиплексорами 10, шестью масштабными преобразователями 11, шестью ячейками 12 памяти хранения коэффициентов масштабных преобразований, тремя блоками 13 суммирования, блоком 14 умножения, сумматором 15 и блоком 16 деления. При этом выход датчика перемещений первой каретки по оси ординат соединен с входом первого демультиплек- сора, выход датчика совместного перемещения кареток по оси абсцисс соединен с входом второго демультиплексора, а выход датчика перемещений второй каретки по оси абсцисс соединен с соответствующим входом блока умножения. Причем выход блока деления соединен с входом следящего электропривода перемещения второй каретки по оси ординат, а выходы вычислителя соединены с соответствующими входами координатографа. 1 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| АНАЛИТИЧЕСКИЙ СТЕРЕОФОТОГРАММЕТРИЧЕСКИЙ ПРИБОР | 1993 |
|
RU2098758C1 |
| АНАЛИТИЧЕСКИЙ СТЕРЕОФОТОГРАММЕТРИЧЕСКИЙ ПРИБОР | 1991 |
|
RU2012845C1 |
| Аналитический универсальный стереофотограмметрический прибор | 1973 |
|
SU478185A1 |
| СТЕРЕОКОМПАРАТОР | 1967 |
|
SU194333A1 |
| Аналитический стереофотограмметрический прибор | 1977 |
|
SU666423A1 |
| Стереоавтограф | 1960 |
|
SU147841A1 |
| Стереокомпаратор | 1981 |
|
SU987386A1 |
| Аналитический фотограмметрический комплекс | 1981 |
|
SU993021A1 |
| Универсальный стереофотограмметрический прибор | 1976 |
|
SU567955A1 |
| Устройство для масштабной корректировки | 1960 |
|
SU134133A1 |
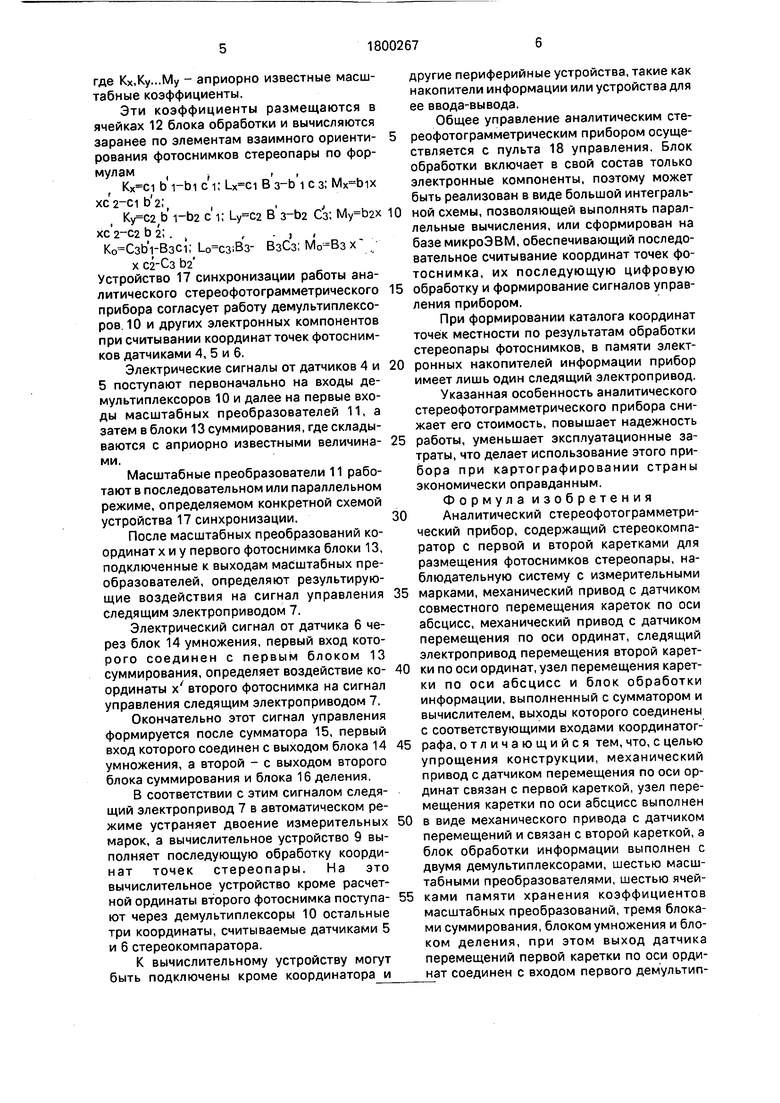
Использование: в фотограмметрии, для создания и обновления топографических карт. Сущность изобретения: прибор содержит стереокомпаратор с первой 1 и второй 2 каретками для размещения фотоснимков стереопары, наблюдательную систему 3 с измерительными марками, механический привод с датчиком 4 совместного перемещения кареток по оси абсцисс, механический привод с датчиком 5 перемещений
Изобретение относится к фотограмметрии и может быть использовано при создании и обновлении топографических карт.
Цель изобретения - упрощение прибора путем уменьшения количества следящих электроприводов и каналов автоматического управления этими электроприводами.
На чертеже представлена принципиальная схема аналитического стереофотог- рамметрического прибора.
Аналитический стереофотограмметри- ческий прибор содержит стереокомпаратор с первой и второй каретками 1 и 2 для размещения фотоснимков стереопары, наблюдательную систему 3 с измерительными марками, датчик 4 совместного перемещения кареток 1 и 2 по направлению оси абсцисс, датчик 5 перемещений первой каретки 1 стереокомпаратора по направлению оси ординат, датчик 6 перемещений второй каретки 2 по направлению оси абсцисс, следящий электропривод 7 перемещения второй каретки 2 стереокомпаратора по направлению оси ординат, координатограф 8 и систему автоматического управления работой прибора, включающую вычислительное устройство 9, два демультиплексора 10, шесть масштабных преобразователей 11, шесть ячеек 12 для хранения масштабных коэффициентов, три блока 13 суммирования, блок 14 умножения, сумматор 15, блок 16 деления, устройство 17 синхронизации работы электронных компонентов прибора и пульт 18.
При переносе контуров со стереомоде- ли местности, построенной по фотоснимкам, размещаемым на каретках 1 и 2 стереокомпаратора, на составительский оригинал, размещаемый на координатографе 8, оператор отслеживает эти контуры пространственной измерительной маркой.
Совмещение пространственной измерительной марки, сформированной по изображениям марок наблюдательной системы 3, он вручную выполняет путем перемещения кареток 1 и 2 без применения дополни- тельных цифровых вычислительных средств, решающих фотограмметрические задачи.
Автоматическое устранение поперечных двоений измерительных марок, находящихся в первом и втором каналах наблюдательной системы 3, осуществляется по сигналам, поступающим с датчиков 4, 5 и 6 стереокомпаратора, при этом выполняется основное условие взаимного ориентирования фотоснимков стереопары, математическая запись которого имеет вид
Y iZ2 Y2Zi,(1) где Y((x-x0)+b2(y-yo)-b3f;
Z (x-x0)+C2(y-yo)-C3f ;
1(X -X0)+b 2(y -yo)-b 3f,
(x -xo)+c 2(y -yo)-c 3f,
x,y,x и у - прямоугольные координаты точек первого и второго фотоснимков стереопары;
f,x0,yo - фокусное расстояние и коорди- наты главных точек фотоснимков,
Ь1,Ь2...с 2,с з- направляющие косинусы угловых элементов взаимного ориентирования фотоснимков.
Решение уравнения (1) относительно ординат у второго фотоснимка стереопары позволяет определять их величины по формуле
(гГ -вГ.-уГ сГ)-х +21 вз -уГсз|
Y1; C2 -Z1 Ь2 --------- где (bVxo+b2+yo+b 3f);
(c l+Xo+C2+yo+C3f). ,
Далее эта зависимость может быть представлена в следующей записи у- .
( Кх X + Ку У +К0 ) х + Lx +х -Ну У + LQ Мх х + My У + Mo
где Кх,Ку...Му - априорно известные масштабные коэффициенты.
Эти коэффициенты размещаются в ячейках 12 блока обработки и вычисляются заранее по элементам взаимного ориенти- рования фотоснимков стереопары по формулам. , ,
b i-bi с i; В з-b 1 с з;
ХС2-С1 Ь 2, г
(b 1-Ь2 с i; В з-Ь2 Сз;
Ь 2; ., . , ,
K0 C3b i-B3ci; 1 0 сз:Вз- ВзСз;
X С2 Сз Ь2
Устройство 17 синхронизации работы аналитического стереофотограмметрического прибора согласует работу демультиплексо- ров. 10 и других электронных компонентов при считывании координат точек фотоснимков датчиками 4, 5 и 6.
Электрические сигналы от датчиков 4 и 5 поступают первоначально на входы де- мультиплексоров 10 и далее на первые входы масштабных преобразователей 11, а затем в блоки 13 суммирования, где складываются с априорно известными величина- ми.
Масштабные преобразователи 11 работают в последовательном или параллельном режиме, определяемом конкретной схемой устройства 17 синхронизации.
После масштабных преобразований координат х и у первого фотоснимка блоки 13, подключенные к выходам масштабных преобразователей, определяют результирующие воздействия на сигнал управления следящим электроприводом 7.
Электрический сигнал от датчика 6 через блок 14 умножения, первый вход которого соединен с первым блоком 13 суммирования, определяет воздействие ко- ординаты к второго фотоснимка на сигнал управления следящим электроприводом 7.
Окончательно этот сигнал управления формируется после сумматора 15, первый вход которого соединен с выходом блока 14 умножения, а второй - с выходом второго блока суммирования и блока 16 деления.
В соответствии с этим сигналом следящий электропривод 7 в автоматическом режиме устраняет двоение измерительных марок, а вычислительное устройство 9 выполняет последующую обработку координат точек стереопары. На это вычислительное устройство кроме расчетной ординаты второго фотоснимка поступа- ют через демультиплексоры 10 остальные три координаты, считываемые датчиками 5 и 6 стереокомпаратора.
К вычислительному устройству могут быть подключены кроме координатора и
другие периферийные устройства, такие как накопители информации или устройства для ее ввода-вывода.
Общее управление аналитическим сте- реофотограмметрическим прибором осуществляется с пульта 18 управления. Блок обработки включает в свой состав только электронные компоненты, поэтому может быть реализован в виде большой интегральной схемы, позволяющей выполнять параллельные вычисления, или сформирован на базе микроЭВМ, обеспечивающий последовательное считывание координат точек фотоснимка, их последующую цифровую обработку и формирование сигналов управления прибором.
При формировании каталога координат точек местности по результатам обработки стереопары фотоснимков, в памяти электронных накопителей информации прибор имеет лишь один следящий электропривод.
Указанная особенность аналитического стереофотограмметрического прибора снижает его стоимость, повышает надежность работы, уменьшает эксплуатационные затраты, что делает использование этого прибора при картографировании страны экономически оправданным.
Формула изобретения
Аналитический стереофотограмметри- ческий прибор, содержащий стереокомпаратор с первой и второй каретками для размещения фотоснимков стереопары, наблюдательную систему с измерительными марками, механический привод с датчиком совместного перемещения кареток по оси абсцисс, механический привод с датчиком перемещения по оси ординат, следящий электропривод перемещения второй каретки по оси ординат, узел перемещения каретки по оси абсцисс и блок обработки информации, выполненный с сумматором и вычислителем, выходы которого соединены с соответствующими входами координатографа, отличающийся тем, что, с целью упрощения конструкции, механический привод с датчиком перемещения по оси ординат связан с первой кареткой, узел перемещения каретки по оси абсцисс выполнен в виде механического привода с датчиком перемещений и связан с второй кареткой, а блок обработки информации выполнен с двумя демультиплексорами, шестью масштабными преобразователями, шестью ячейками памяти хранения коэффициентов масштабных преобразований, тремя блоками суммирования, блоком умножения и блоком деления, при этом выход датчика перемещений первой каретки по оси ординат соединен с входом первого демультиплексора, первый, второй и третий выходы которого соединены с первыми входами первого, второго и третьего масштабных преобразователей соответственно, а четвертый выход - с первым входом вычислителя, выход датчика совместного перемещения кареток по оси абсцисс соединен с входом второго демультиплексора, первый, второй и третий выходы которого соединены с первыми входами четвертого, пятого и шестого масштабных преобразователей соответственно, а четвертый выход - с вторым входом вычислителя, выходы первой, второй и третьей ячеек памяти соединены с вторыми входами первого, второго и третьего масштабных преобразователей соответственно, выходы которых соединены с первыми входами первого, второго и третьего блоков суммирования соответственно, а выходы четвертой, пятой и шестой ячеек памяти соединены с вторыми входами четвертого,
пятого и шестого масштабных преобразователей соответственно, выходы которых соединены с вторыми входами первого, второго и третьего блоков суммирования соответственно, причем выход первого блока суммирования соединен с первым входом блока умножения, выход которого соединен с первым входом сумматора, выход второго блока суммирования соединен с вторым входом сумматора, выход которого соединен с первым входом блока деления, выход третьего блока суммирования - с вторым входом блока деления, выход которого соединен с третьим входом вычислителя с входом следящего электропривода перемещений второй каретки по оси ординат, а выход датчика перемещений второй каретки по оси абсцисс соединен с вторым входом блока умножения и с четвертым входом вычислителя.
| Лобанов А.Н | |||
| Фотограмметрия | |||
| М.: Недра, 1984, с.299-301 | |||
| Аналитический универсальный стереофотограмметрический прибор | 1973 |
|
SU478185A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
