Изобретение относится к устройствам отображения информации, используемой пилотом и членами экипажа при пилотировании вертолетом, а именно к командно-пилотажным индикаторам (КПИ).
Наиболее близким по технической сущности к заявляемому техническому решению является «Командно-пилотажный индикатор». Патент на изобретение РФ №2474862, заявка №2011153634, приоритет изобретения 28 декабря 2011 г., МПК G01C 23/00, G05D 1/00, который состоит из экрана на котором индицируются:
- неподвижный относительно центра индикационного поля экрана отсчетный индекс в виде стилизованного изображения самолета при виде сзади с выпущенными шасси ("Самолет"), индекс "Самолет" выполнен с возможностью поворота вокруг своего центра симметрии, обозначающий текущее положение вертолета в пространстве;
- подвижный индекс в виде стилизованного изображения самолета при виде сзади с выпущенными шасси, обозначающий требуемое положение вертолета в пространстве "Лидер", имеющий возможность поворота вокруг своего центра симметрии, а также перемещения по вертикали и горизонтали относительно индекса "Самолет".
Стилизованное изображение индексов "Самолет" и "Лидер" выполнено в виде одной горизонтальной прямой, символизирующей крылья летательного аппарата (ЛА), и одной вертикальной прямой, символизирующей киль ЛА и пересекающей горизонтальную прямую в ее центре под прямым углом, создается в генераторе символов, соединенном с экраном.
Средства управления подвижным индексом "Лидер", выполненные в виде блоков вычисления характеристик "Лидера", на входы которых поступают сигналы из систем ЛА и снабжены блоком вычисления параметров текущего угла скольжения, блоком вычисления значения расчетного угла крена, блоком вычисления расчетного угла скольжения, блоком расчета отклонения ЛА по высоте полета и коэффициента масштаба отклонения высоты полета ЛА, блоком вычисления значения расчетного угла тангажа, блоком расчета бокового отклонения и коэффициента масштаба бокового отклонения ЛА, на входы которых поступают сигналы из систем ЛА, а с выходов которых на генератор символов поступают сигналы в соответствии с величиной ошибки управления по высоте, обеспечивающее перемещение индекса "Лидер" по индикационному полю в вертикальном направлении, по углу тангажа и поворотом его вокруг центра симметрии в соответствии с величиной ошибки по углу крена, увеличением или уменьшением линейных размеров индекса "Лидер" при увеличении или уменьшении соответственно заданной скорости полета таким образом, что при нулевых значениях ошибок по всем контролируемым параметрам индекс "Лидер" совмещается с индексом "Самолет", а выходы которых соединены с входами генератора символов, а также выполнен с возможностью индикации индекса "радиовысота" и неподвижной неравномерной шкалы значения высоты полета, индицируемой на вертикальной стороне границы индикационного поля экрана с нулевым значением высоты, расположенным на уровне горизонтальной линии, проходящей через центр индикационного поля экрана, при этом оба индекса "Самолет" и "Лидер" выполнены с возможностью одновременного отображения текущего угла скольжения и угла тангажа индекса "Самолет" и отклонение от заданного угла скольжения и угла тангажа индекса "Лидер" путем индикации треугольника, основание которого равно длине горизонтальной прямой линии, символизирующей крылья ЛА, а положение вершины треугольника соответствует текущему значению угла тангажа и угла скольжения индекса "Самолет" и отклонению от заданного значения угла тангажа и угла скольжения индекса "Лидер".
В прототипе командно-пилотажного индикатора представленная индикация в виде отклонения текущей скорости полета ЛА от программно-заданной скорости полета визуализируется увеличением или уменьшением подобия геометрического размера фигуры индекса "Лидер" («для учета влияния текущей скорости полета ЛА величина отклонения текущей скорости полета ЛА от заданной скорости полета ΔV=(Vзад-Vтек), масштабируется и, как визуализирующий сигнал коэффициента масштаба скорости полета ЛА mV, подается в генератор символов (ГС) 15 для индикации увеличения или уменьшения подобия геометрического размера фигуры индекса "Лидер" 4»). «Разность скоростей ΔV=(Vзад-Vтек) определяет коэффициент масштаба скорости полета ЛА-mV. Когда текущее значение вектора скорости ЛА Vтек меньше программно заданного вектора скорости ЛА Vзад, индекс "Лидер" 4 уменьшается в размерах - "удаляется". Когда текущее значение вектора скорости ЛА Vтек больше программно заданного вектора скорости ЛА Vзад, индекс "Лидер" 4 увеличивается в размерах - "приближается". Когда текущее значение вектора скорости ЛА Vтек равно программно заданному вектору скорости ЛА Vзад, индекс "Лидер" 4, имеет геометрический размер равный геометрическому размеру индекса "Самолет" 5». Управляя своим вертолетом в продольной плоскости по углу тангажа, летчик наблюдает изменение геометрической фигуры угла тангажа индекса "Самолет", который индицируется на экране КПИ в виде треугольника, линия основания которого равна длине горизонтальной прямой линии, символизирующей крылья ЛА, а «положение вершины треугольника соответствует текущему значению угла тангажа индекса "Самолет"». Как видно из описания прототипа командно-пилотажного индикатора, летчику, управляющему своим самолетом в директорном режиме ручного управления, достаточно выдерживать геометрическое подобие индекса «Самолет» с геометрическим подобием фигуры индекса «Лидер», представленных на экране КПИ, не задумываясь о числовом значении величины скорости полета ЛА на данном участке маршрута. В директорном режиме ручного управления полетом процесс перевода вертолета со значения одной текущей скорости полета на другое значение текущей скорости полета выполняется осторожно, напряженно и растягивается во времени с одновременным увеличением ошибочных действий органами продольного управления полетом вертолета. Но может случиться так, что летчик получит радиокоманду о том, чтобы срочно измененить величину первоначально заданной программированной для директорного режима автоматического управления текущей скорости полета в связи со сложными метеоусловиями или с условиями изменения полетного задания на вполне конкретное числовое значение скорости для пограммируемого вновь директорного режима автоматического управления полетом. Инерция большой массы вертолета при директорном режиме ручного управления вертолетом значительно усложняет процесс изменения вновь задаваемой программируемой скорости полета для директорного режима автоматического управления.
Срочное изменение текущей скорости полета вертолета (в директорном режиме ручного управлении полетом) на скорость полета, соответствующую определенному числовому значению, потребует от летчика большого нервного напряжения и профессионального опыта, т.к. делая управляющее движение органами управления, и тем самым изменяя угол тангажа, он приводит в угловое движение массу вертолета. Летчику придется интуитивно определять, что угловая скорость угла тангажа его вертолета установилась и равна нулю и одновременно по указателю скорости считывать показания установившейся текущей скорости полета и затем повторять следующее управляющее движение органами управления по углу тангажа до тех пор, пока не будет достигнута заданная скорость полета вертолета. Такой способ изменения скорости полета требует большого количества приближений управляющими движениями органов управления.
Технической задачей заявляемого изобретения является:
- повышение безопасности и упрощение пилотирования вертолетом на горизонтальном участке маршрута за счет повышения информационной наглядности представления на экране КПИ заданной скорости полета вертолета и снятия психофизиологической нагрузки с летчика в процессе изменения текущей скорости полета, при переходных скоростных режимах полетов с одного числового значения текущей скорости полета вертолета на другое числовое значение скорости полета вертолета в условиях синдрома эмоционального выгорания (эмоциональные нагрузки, вибрации, нехватка кислорода, перепады давления, дефицит времени на принятие решения, полет на малой высоте и другие аналогичные факторы);
- упрощение контроля выполнения программных режимов полета.
Техническая задача достигается тем, что командно-пилотажный индикатор вертолета, содержащий экран, на котором индицируются неподвижный относительно центра индикационного поля экрана отсчетный индекс "Самолет", выполненный в виде одной горизонтальной прямой, символизирующей крылья летательного аппарата (ЛА), и одной вертикальной прямой, символизирующей киль ЛА, и пересекающей горизонтальную прямую в ее центре под прямым углом, имеющий возможность поворота вокруг своего центра симметрии и обозначающий текущее положение вертолета в пространстве, индицируемый на экране подвижный индекс "Лидер", выполненный в виде одной горизонтальной прямой, символизирующей крылья ЛА, и одной вертикальной прямой, символизирующей киль ЛА, и пересекающей горизонтальную прямую в ее центре под прямым углом, имеющий возможность поворота вокруг своего центра симметрии, а также перемещения по вертикали и горизонтали относительно индекса "Самолет" и обозначающий требуемое положение в пространстве, генератор символов, соединенный с экраном, средства управления подвижным индексом "Лидер", выполненные в виде блока вычисления характеристик "Лидера", а именно блока вычисления параметров текущего угла скольжения, блока вычисления значения расчетного угла крена, блока вычисления расчетного угла скольжения, блока расчета отклонения ЛА по высоте полета и коэффициента масштаба отклонения высоты полета ЛА, блока вычисления значения расчетного угла тангажа, блока расчета бокового отклонения и коэффициента масштаба бокового отклонения ЛА, на входы которых поступают сигналы из систем ЛА, а с выходов которых на генератор символов поступают сигналы в соответствии с величиной ошибки управления по высоте, обеспечивающие перемещение индекса "Лидер" по индикационному полю в вертикальном направлении, с возможностью индикации индекса "радиовысота" и неподвижной неравномерной шкалы значения высоты полета, индицируемой на вертикальной стороне границы индикационного поля экрана с нулевым значением высоты, расположенным на уровне горизонтальной линии, проходящей через центр индикационного поля экрана, при этом индекс "Самолет" и индекс "Лидер" выполнены с возможностью одновременного отображения угла скольжения и угла тангажа, путем индикации треугольника, основание которого равно длине горизонтальной прямой линии, символизирующей крылья ЛА, а положение вершины треугольника соответствует текущему значению угла тангажа и угла скольжения индексом "Самолет" и отклонению от заданного значения угла тангажа и угла скольжения индексом "Лидер" поворотом индекса "Лидер" вокруг центра симметрии в соответствии с величиной ошибки по углу крена, увеличением или уменьшением линейных размеров индекса «Лидер» при увеличении или уменьшении, соответственно, заданной скорости полета таким образом, что при нулевых значениях ошибок по всем контролируемым параметрам индекс "Лидер" совмещается с индексом "Самолет", дополнительно снабжен блоком учета расхода в полете массы полезной нагрузки вертолета, блоком, индицирующим указатель скорости полета вертолета, блоком вычисления в связанной с вертолетом системе координат пространственного положения центра масс, моментов инерции вертолета в полете и значения параметра продольного расстояния от центра масс вертолета до оси несущего винта, блоком расчета прогнозируемой скорости полета вертолета и переключателем блоков автопилота функций автоматической стабилизации по тангажу, высоте и скорости, причем вход блока учета расхода в полете массы полезной нагрузки вертолета соединен с системами ЛА по параметрам расходуемой в полете массы полезной нагрузки вертолета, а выход соединен с входом блока вычисления в связанной с вертолетом системе координат пространственного положения центра масс, моментов инерции вертолета в полете и значения параметра продольного расстояния от центра масс вертолета до оси несущего винта по параметру расходуемой в полете полезной нагрузки вертолета, выход которого соединен с первым входом блока расчета прогнозируемой скорости полета вертолета по параметру продольного расстояния от центра масс вертолета до оси несущего винта, а второй вход блока расчета прогнозируемой скорости полета вертолета соединен через переключатель блоков автопилота функций автоматической стабилизации по тангажу, высоте и скорости по параметру текущего значения угла тангажа, а выход блока расчета прогнозируемой скорости полета вертолета по параметру заданной скорости полета вертолета и выход блока системы автоматического управления полетом по параметру текущей скорости полета вертолета соединены с входом блока, индицирующего на навигационном поле экрана указатель скорости полета вертолета, выход которого соединен с генератором символов, который выполнен с возможностью индикации указателя скорости полета вертолета с числовой шкалой и индексом указателя текущей скорости полета вертолета и индексом указателя заданной скорости полета вертолета.
Изобретение поясняется чертежами.
На фиг.1 изображена схема сопряжения систем вертолета с командно-пилотажным индикатором.
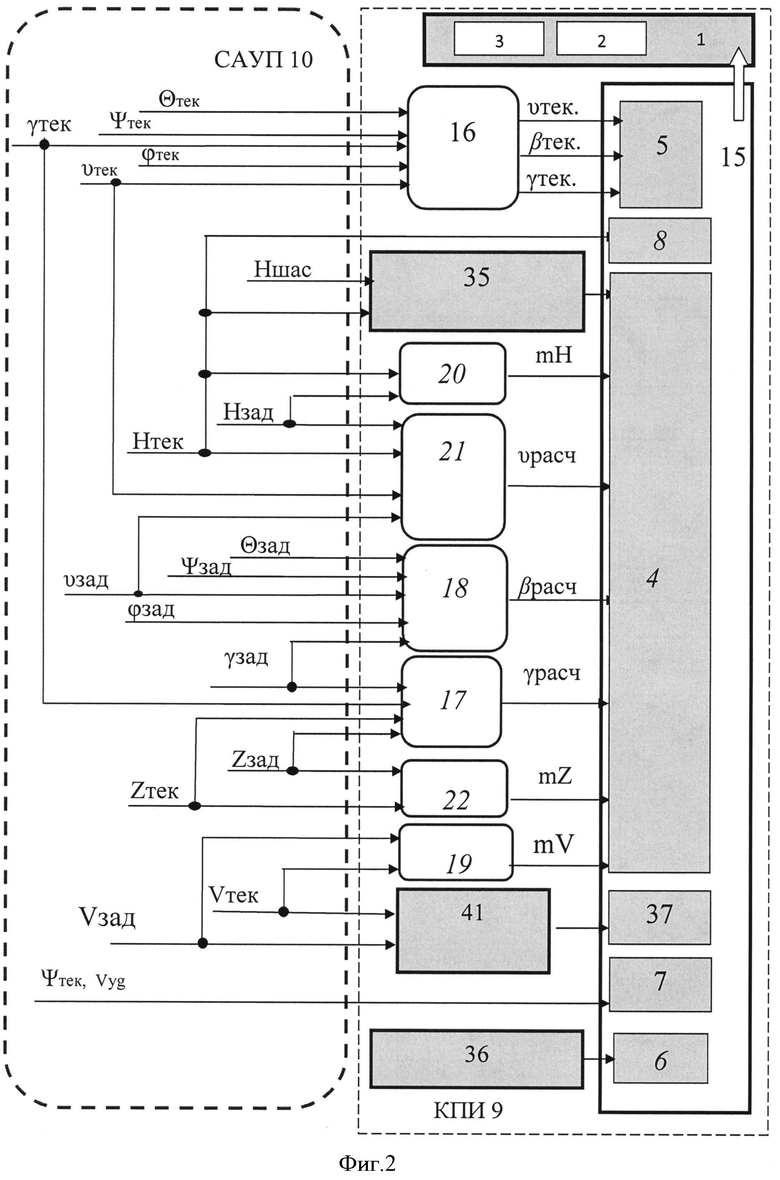
На фиг.2 изображена функциональная схема командно-пилотажного индикатора.
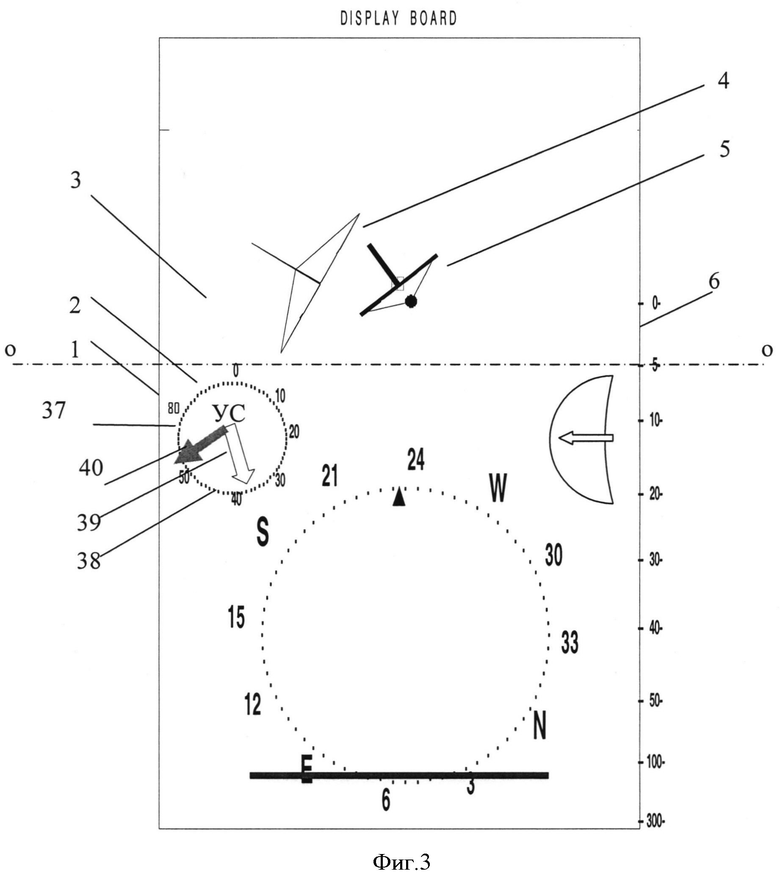
На фиг.3 изображен экран командно-пилотажного индикатора с указателем скорости полета вертолета (УС), с числовой шкалой значений величин скоростей полета ЛА, индексом указателя текущей скорости полета вертолета и индексом указателя заданной скорости полета вертолета.
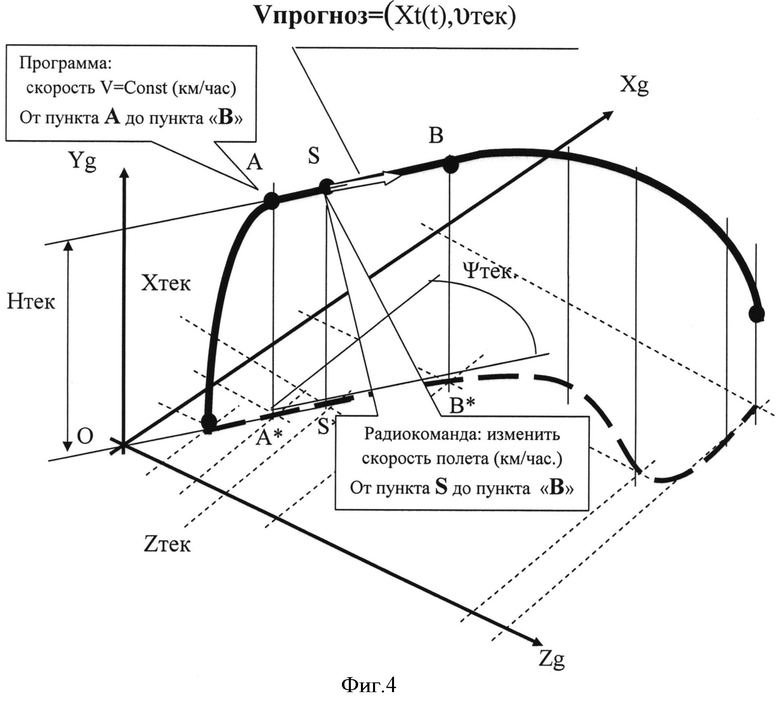
На фиг.4 изображена опорная траектория полета вертолета с горизонтальным прямолинейным участком АВ.
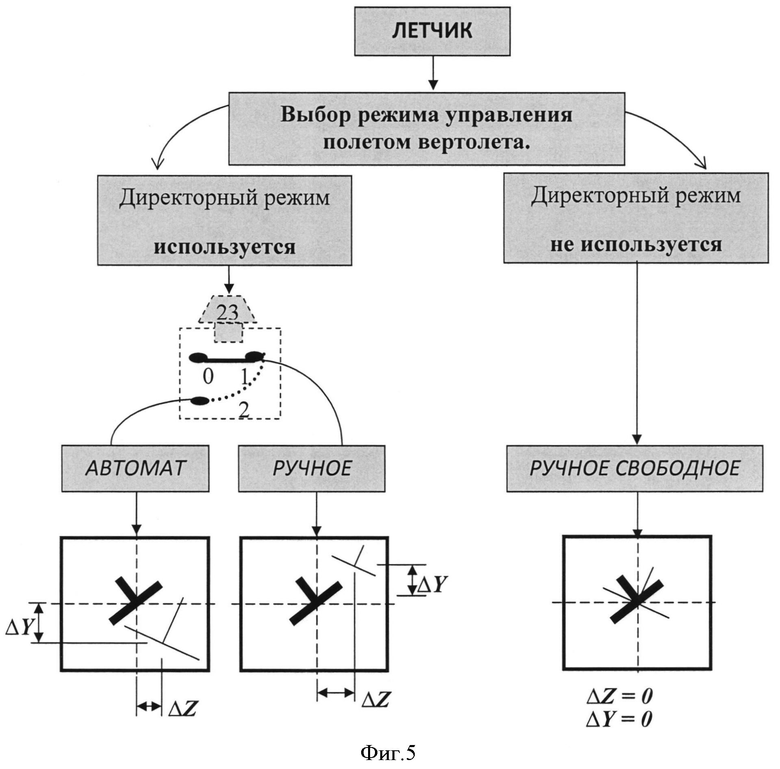
На фиг.5 изображена схема выбора летчиком режимов управления полетом вертолета.
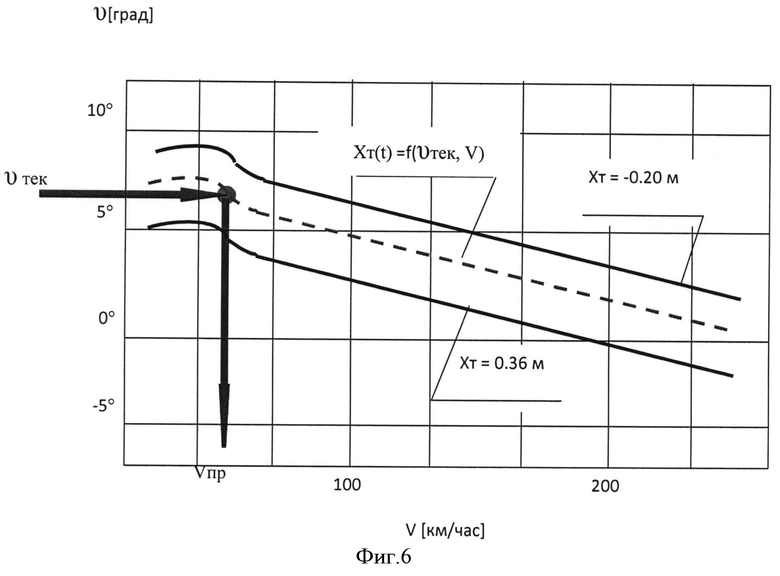
На фиг.6 изображен характерный вид кривых продольной балансировки одновинтового вертолета для горизонтального участка маршрута.
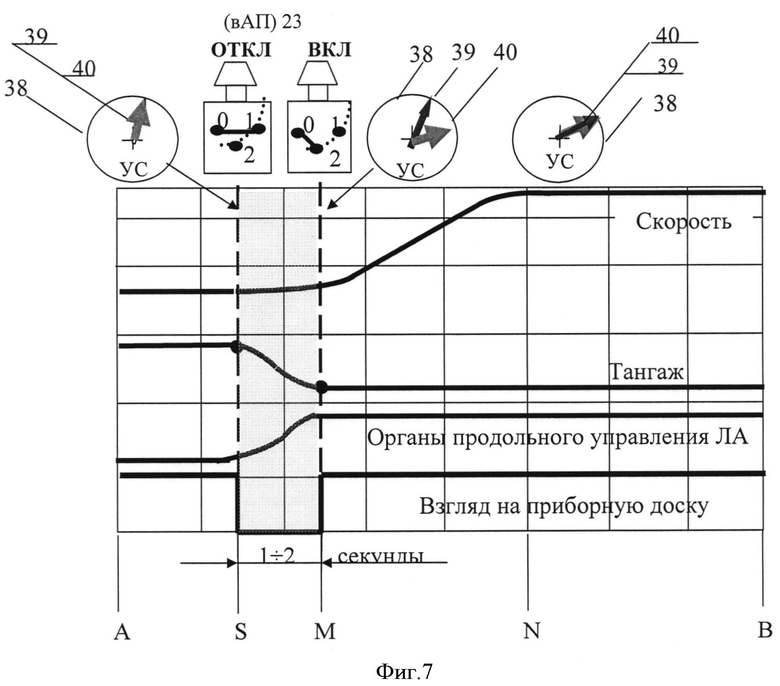
На фиг.7 изображена диаграмма управления вертолетом с использованием летчиком заявляемого командно-пилотажного индикатора вертолета.
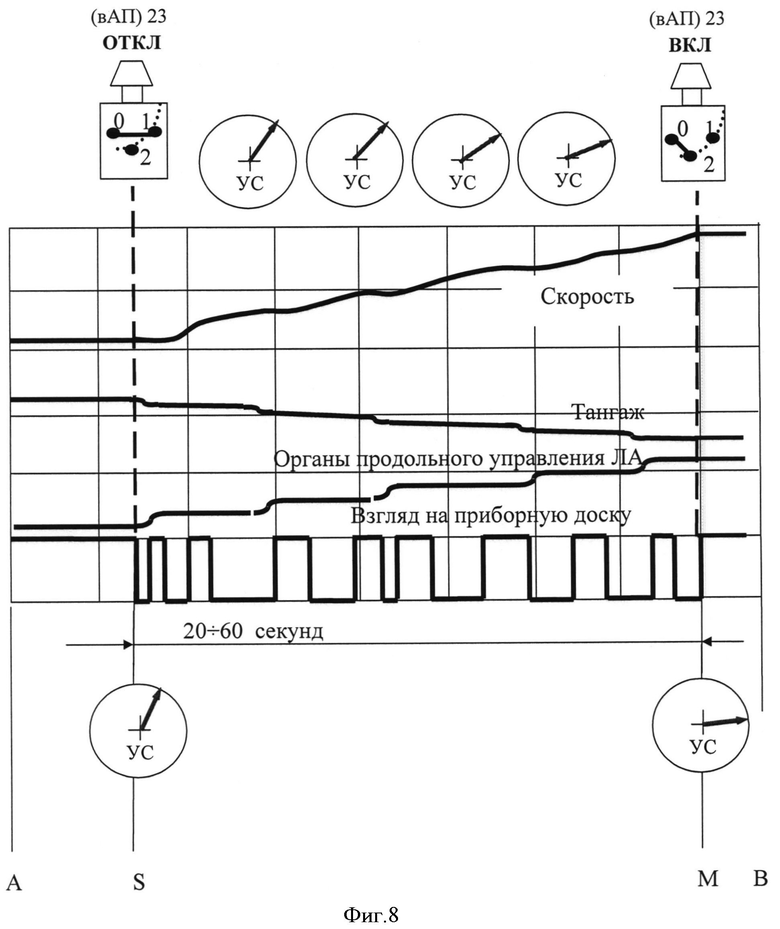
На фиг.8 изображена диаграмма управления вертолетом без использования летчиком заявляемого командно-пилотажного индикатора вертолета.
Заявляемый командно-пилотажный индикатор вертолета состоит из:
- экрана командно-пилотажного индикатора 1, далее экран 1, разделенного на навигационное поле 2 экрана 1 и индикационное поле 3 экрана 1;
- блока, индицирующего на индикационном поле 3 экрана 1 подвижный индекс неуправляемый летчиком "Лидер" 4, далее "Лидер" 4:
- блока, индицирующего на индикационном поле 3 экрана 1 подвижный индекс управляемого летчиком "Самолет" 5 далее "Самолет" 5;
- блока, индицирующего на навигационном поле 2 и индикационном поле 3 экрана 1 неподвижную неравномерную расположенную на вертикальной стороне границы навигационного поля 2 и индикационного поля 3 экрана 1 шкалу значения высоты 6 полета вертолета, далее шкала высоты 6;
- блока, индицирующего на навигационном поле 2 экрана 1 различную навигационную информацию текущих значений параметров полета вертолета 7 (например: указатель курса, указатель вертикальной скорости полета и другие);
- блока, индицирующего на экране 1 индекс "радиовысоты" 8;
- блока командно-пилотажного индикатора (КПИ) 9;
- блока системы автоматического управления полетом (САУП) 10;
- блока системы воздушных сигналов (СВС) 11;
- блока инерциальной навигационной системы (ИНС) 12;
- блока навигационного вычислителя исходных данных (НВ ИД) 13;
- блока навигационного вычислителя расчетных данных (НВ РД) 14;
- блока генератора символов (ГС) 15;
- блока вычисления параметров текущего угла скольжения 16;
- блока вычисления значения расчетного угла крена 17;
- блока вычисления расчетного угла скольжения 18;
- блока вычисления коэффициента скорости полета вертолета 19;
- блока расчета отклонения вертолета по высоте полета и коэффициента масштаба отклонения высоты полета вертолета 20;
- блока вычисления значения расчетного угла тангажа 21;
- блока расчета бокового отклонения и коэффициента масштаба бокового отклонения вертолета 22;
- переключатель блоков автопилота функций автоматической стабилизации по тангажу, высоте и скорости (вАП) 23;
- органов управления вертолетом в вертикальной плоскости по тангажу и высоте (ОУ) 24;
- блока автопилота функций автоматической стабилизации (АС) 25;
- блока автопилота функции стабилизации по тангажу (Aυ) 26;
- блока автопилота функции стабилизации по высоте (Ан) 27;
- блока автопилота функции стабилизации по скорости (Av) 28;
- блока автопилота функции стабилизации по крену (Аγ) 29;
- блока автопилота функции стабилизации по курсу (Аψ) 30;
- блока расчета прогнозируемой скорости полета вертолета (ПС) 31;
- блока вычисления в связанной с вертолетом системе координат пространственного положения центра масс, моментов инерции вертолета в полете и значение параметра продольного расстояния от центра масс вертолета до оси несущего винта (ЦМ) 32;
- блока учета расхода в полете массы полезной нагрузки вертолета (например: топливо, грузы, боезапас) (РПН) 33;
- переключатель ввода исходных данных параметров программной трехмерной траектории полета вертолета (В) 34;
- блока, индицирующего на индикационном поле 3 экрана 1 команду «убрать шасси»/«выпустить шасси» для индекса "Лидер" 4 (КШ) 35;
- блока внутреннего языка для визуализации переменной шкалы высоты полета вертолета (Ш) 36;
- указателя скорости полета вертолета (УС) 37 с числовой шкалой 38, индексом указателя текущей скорости полета вертолета 39, индексом указателя заданной скорости полета вертолета 40;
- блока, индицирующего указатель скорости полета вертолета (БУС) 41.
Полетная информация (фиг.2) визуализируется летчику вертолета на индикационном поле 3 и навигационном поле 2 экрана 1 блока командно-пилотажного индикатора (КПИ) 9, по параметрам полета, поступающим с выхода блока системы автоматического управления полетом (САУП) 10 на вход (КПИ) 9.
- текущее значение высоты полета вертолета - Нтек;
- программно задаваемая высота полета вертолета на маршруте - Нзад;
- текущее боковое отклонение вертолета - Zтек;
- программно задаваемое боковое отклонение полета вертолета - Zзад;
- текущее значение вектора скорости вертолета - Vтек;
- текущее значение угла поворота траектории вертолета - Ψтек;
- программно задаваемый угол поворота траектории вертолета - Ψзад;
- текущее значение угла наклона траектории вертолета - Θтек;
- программно задаваемый угол наклона траектории вертолета - Θзад;
- текущее значение угла тангажа - υтек;
- программно задаваемое угловое положение вертолета на траектории по углу тангажа - υзад;
- текущее значение угла крена - γтек;
- программно задаваемое угловое положение вертолета на траектории по углу крена - γзад;
- текущее значение угла рыскания - φтек;
- программно задаваемое угловое положение вертолета на траектории по углу рыскания - φзад;
- программно задаваемая высота полета вертолета на исполнение команды «убрать шасси»/«выпустить шасси» - Ншас.
- заданная скорость полета вертолета - Vзад.
Для визуализации полетной информации в блоке командно-пилотажного индикатора (КПИ) 9 используются внутренние рабочие переменные блока:
- текущее значение угла тангажа - υтек;
- расчетное значение угла тангажа - υрасч;
- текущее значение угла крена - γтек;
- расчетное значение угла крена - γрасч;
- текущее значение угла скольжения - βтек;
- расчетное значение угла крена - βрасч;
- коэффициента масштаба отклонения высоты полета ЛА - mH;
- коэффициента масштаба бокового отклонения ЛА - mZ;
- коэффициента масштаба скорости полета ЛА - mV.
На вход блока системы автоматического управления полетом (САУП) 10 для вычисления управляющих сигналов и параметров визуализации поступают параметры полета от основных систем вертолета:
- с выхода блока системы воздушных сигналов (СВС) 11 параметры текущего значения высоты полета вертолета - Нтек, текущего значения вектора скорости вертолета - Vтек и текущей проекции вектора вертикальной скорости вертолета - Vyg тек;
- с выхода блока инерциальной навигационной системы (ИНС) 12 поступают параметры углового и пространственного положения вертолета: υтек, γтек, φтек соответственно, текущее значение угла тангажа, текущее значение угла крена, текущее значение угла рыскания и Хтек - текущее значение дальности полета вертолета, Zтек - текущее боковое отклонении вертолета;
- с выхода блока навигационного вычислителя исходных данных (НВ ИД) 13 поступают параметры трехмерной программной траектории полета в земной системе координат: время полета на маршруте - Т, дальность на маршруте от точки старта - Хзад, высота полета на маршруте - Нзад, боковое отклонение - Zзад, программно задаваемая высота полета вертолета на исполнение команды «убрать шасси»/«выпустить шасси» - Ншас.
Одновременно эти же параметры трехмерной программной траектории полета в земной системе координат, дополненные инерционно-массовыми характеристиками Ixx, Iyy, Izz, Ixy, Ixz, Iyz для связанных осей вертолета, поступают на вход блока навигационного вычислителя расчетных данных (НВ РД) 14:
- с выхода блока навигационного вычислителя расчетных данных (НВ РД) 14 поступают на вход блока системы автоматического управления полетом (САУП) 10 (вычисленные по входным параметрам блока (НВ ИД) 13) дополнительно задаваемые параметры полета:
- в земной системе координат (ЗСК) oXgYgZg:
Vxg зад - проекции скорости на ось Xg;
Vyg зад - проекции скорости на ось Yg;
Vzg зад - проекции скорости на ось Zg;
Ψзад - угол поворота траектории полета вертолета;
Θзад - угол наклона траектории ЛА;
- в связанной с вертолетом системе координат oX1Y1Z1:
γзад - угол крена,
υзад - угол тангажа,
φзад - угол рыскания.
Ixx - центральный момент инерции вдоль оси X1;
Iyy - центральный момент инерции вдоль оси Y1;
Izz - центральный момент инерции вдоль оси Z1;
Ixy - центробежный момент инерции в плоскости oX1Y1;
Ixz - центробежный момент инерции в плоскости oX1Z1;
Iyz - центробежный момент инерции в плоскости oY1Z1.
На вход блока учета расхода в полете массы полезной нагрузки вертолета (например: топливо, грузы, боезапас) (РПН) 33 от основных систем вертолета поступают значения параметров расходуемой в полете массы полезной нагрузки вертолета: Мо (t, xm, ym, zm) - масса полезной нагрузки;
t - время полета;
xm, ym, zm - координаты центра масс полезной нагрузки в связанной с вертолетом системе координат;
с выхода блока учета расхода в полете массы полезной нагрузки вертолета (например: топливо, грузы, боезапас) (РПН) 33 поступают параметры массы полезной нагрузки и ее координаты, измененные во времени в связанной с вертолетом системе координат в блок вычисления в связанной с вертолетом системе координат пространственного положения центра масс, моментов инерции вертолета в полете и значение параметра продольного расстояния от центра масс вертолета до оси несущего винта (ЦМ) 32, в котором определяется текущая масса вертолета (Мв) и координаты центра масс вертолета в связанной с вертолетом системе координат.
Мв (t, хв, ув, zb) - текущая масса вертолета
t - время полета;
хв, ув, zb - координаты текущего центра масс вертолета в связанной с вертолетом системе координат, величины моментов инерции вертолета в полете Ixx, Iyy, Izz, Ixy, Ixz, Iyz и текущее значение Хт(1) продольного расстояния от оси несущего винта до центра масс вертолета.
С одного выхода блока вычисления в связанной с вертолетом системе координат пространственного положения центра масс, моментов инерции вертолета в полете и значения параметра продольного расстояния от центра масс вертолета до оси несущего винта (ЦМ) 32 в блок системы автоматического управления полетом (САУП) 10 поступают параметры текущей массы вертолета - Мв, координаты текущего центра масс вертолета в связанной с вертолетом системе координат - хв, ув, zb, величины моментов инерции вертолета в полете Ixx, Iyy, Izz, Ixy, Ixz, Iyz и текущее значение Хт(t) продольного расстояния от оси несущего винта до центра масс вертолета. Со второго выхода блока вычисления в связанной с вертолетом системе координат пространственного положения центра масс, моментов инерции вертолета в полете и значение параметра продольного расстояния от центра масс вертолета до оси несущего винта (ЦМ) 32 на первый вход блока расчета прогнозируемой скорости полета вертолета (ПС) 31 передается параметр текущего значения Хт(t) продольного расстояния от оси несущего винта до центра масс вертолета. С выхода блока автопилота функций автоматической стабилизации (АС) 25 на второй вход блока расчета прогнозируемой скорости полета вертолета (ПС) 31 через переключатель блоков автопилота функций автоматической стабилизации по тангажу, высоте и скорости (вАП) 23 при работе системы автоматического управления полетом в директорном режиме ручного управления поступает параметр υтек - текущее значение угла тангажа. С выхода блока расчета прогнозируемой скорости полета вертолета (ПС) 31 через вход блока командно-пилотажного индикатора (КПП) 9 на вход блока (БУС) 41 поступает параметр (Vтек), необходимый для индикации индекса указателя текущей скорости полета вертолета 39, параметр (Vзад), необходимый для индикации индекса указателя заданной скорости полета вертолета 40, с выхода которого поступают на вход блока генератора символов (ГС) 15 для индикации на навигационном поле 2 экрана 1 указателя скорости 37, с числовой шкалой 38, индексом текущей скорости полета вертолета 39, индексом указателя заданной скорости полета вертолета 40. В предлагаемом командно-пилотажном индикаторе отдельное представление блоков, выполняющих прием и обработку пилотажно-навигационной информации, используемой для управления фигурами, символами, подвижными шкалами, указателями и другими элементами формата изображения на фиг.2 не показаны.
Работа командно-пилотажного индикатора начинается с того, что летчик при подготовке к полету устанавливает переключатель ввода исходных данных параметров программной трехмерной траектории полета вертолета (В) 34 в положение «ввод исходных данных параметров программной трехмерной траектории полета вертолета». В блок навигационного вычислителя исходных данных (НВ ИД) 13 летчик вводит параметры программной трехмерной траектории полета и инерционно-массовые характеристики вертолета, подготовленные к обработке в пространстве земной системы координат. После ввода исходных данных, летчик переводит переключатель ввода исходных данных параметров программной трехмерной траектории полета вертолета (В) 34 (фиг.1) в положение, которое соответствует команде «ввод данных прекращен». По этой команде на вход блока навигационного вычислителя расчетных данных (НВ РД) 14 поступают все исходные данные параметров программной трехмерной траектории полета вертолета и инерционно-массовые характеристики вертолета с выхода блока навигационного вычислителя исходных данных (НВ ИД) 13. В блоке навигационного вычислителя расчетных данных (НВ РД) 14 исходные данные параметров трехмерной программной траектории полета и инерционно-массовые характеристики вертолета пересчитываются в дополнительно задаваемые параметры полета вертолета, которые необходимы для движения в директорном режиме автоматического управления полетом вертолета и для работы блока системы автоматического управления полетом (САУП) 10. На маршруте полета в директорном режиме автоматического управления полетом (фиг.1) на вход блока системы автоматического управления полетом (САУП) 10 постоянно поступают сигналы с выходов основных систем вертолета таких, как блок системы воздушных сигналов (СВС) 11, блок инерциальной навигационной системы (ИНС) 12, блок навигационного вычислителя исходных данных (НВ ИД) 13, блок навигационного вычислителя расчетных данных (НВ РД) 14, блок учета расхода в полете массы полезной нагрузки вертолета (РПН) 33, блок вычисления в связанной с вертолетом системе координат пространственного положения центра масс, моментов инерции вертолета в полете и значение параметра продольного расстояния от центра масс вертолета до оси несущего винта (ЦМ) 32. Рабочие параметры блока (ЦМ) 32 инерционно-массовые характеристики - Ixx, Iyy, Izz, Ixy, Ixz, Iyz, масса полезной нагрузки и координаты центра масс полезной нагрузки - Мо, xm, ym, zm в текущий момент времени t используются в блоке системы автоматического управления полетом (САУП) 10 для управления полетом вертолета. В блоке системы автоматического управления полетом (САУП) 10 входные параметры обрабатываются (в заявляемом предложении рассматриваются параметры для блока автопилота функций автоматической стабилизации (АС) 25). С выхода блока системы автоматического управления полетом (САУП) 10 параметры поступают в блок командно-пилотажного индикатора (КПИ) 9, где в блоке генератора символов (ГС) 15 преобразуются в управляющие индексы параметров полета и выводятся на экран 1, по визуальной информации которой летчик контролирует полет в директорном режиме автоматического управления полетом по индексам «Лидер» 4 и «Самолет» 5, а также навигационным приборам, визуализирующим параметры горизонтального полета на маршруте от пункта А в направлении пункта В (фиг.4): угол поворота траектории - Ψтек=Ψзад, указатель вертикальной скорости и другие. В пункте S маршрута АВ (фиг.4) траектории полета, летчик получает радиокоманду: "изменить текущую скорость полета вертолета на горизонтальном участке маршрута" до конкретного числового значения. Последовательность действий летчика, исполняющего эту радиокоманду, будет определяться динамическими свойствами присущими только вертолету, для которого величина скорости полета зависит от угла наклона плоскости вращения несущего винта. Для вертолета, как динамической системы. Vтек - текущее значение вектора скорости вертолета и Vтек - текущее значение угла тангажа, в заявляемом КПИ рассматриваются как величины функционально зависимые, т.к., при прочих равных условиях, в горизонтальном полете каждому значению угла тангажа соответствует единственное значение горизонтальной скорости полета вертолета. Для заявляемого КПИ эту функциональную зависимость в первом приближении выразим формулой Vтек=f(υтек). Летчик, исполняя радиокоманду, во-первых, обращает внимание на указатель скорости полета вертолета (УС) 37, на котором индексом указателя текущей скорости полета 39 отмечено числовое значение текущей скорости полета вертолета, индекс указателя заданной скорости полета вертолета 40 в этот момент времени совпадает с индексом указателя текущей скорости полета вертолета 39 (т.к. балансировочный режим полета). Затем летчик переключателем блоков автопилота функций автоматической стабилизации по тангажу, высоте и скорости (вАП) 23 (фиг.1) (фиг.5) отключает в блоке автопилота функций автоматической стабилизации (АС) 25 блок автопилота функции стабилизации по тангажу (Av) 26, блок автопилота функции стабилизации по высоте (Ан) 27 и блок автопилота функции стабилизации по скорости (Av) 28. Тем самым летчик переводит систему управления вертолетом в директорный режим ручного управления полетом по углу тангажа, высоте и скорости полета, не отключая работу других основных систем вертолета. В следующий момент летчик органами управления (ОУ) 24 изменяет угол тангажа. Изменяя угол тангажа, летчик изменяет величину скорости полета вертолета. Этот маневр фиксируется основными системами вертолета и в параметрическом виде (через протоколы обмена) передается в блок системы автоматического управления полетом (САУП) 10. Из протокола обмена данных, поступающих с выхода блока инерциальной навигационной системы (ИНС) 12, выбирается только один параметр - утек, который передается на вход блока расчета прогнозируемой скорости полета вертолета (ПС) 31. На другой вход блока расчета прогнозируемой скорости полета вертолета (ПС) 31 постоянно поступает значение параметра Хт(t) - продольное расстояние от центра масс вертолета до оси несущего винта. В блоке расчета прогнозируемой скорости полета вертолета (ПС) 31 по аналитическим формулам вычисляется числовое значение функциональной зависимости прогнозируемой скорости полета вертолета Vзад=Vпр=f(υтек, Хт(t)=const) для горизонтального участка маршрута.
Геометрический смысл вычисления функциональной зависимости прогнозируемой скорости полета вертолета (Vпр) представлен на графике фигуры 6, где по оси ординат отложены экспериментально-расчетные числовые значения текущего угла тангажа, а по оси абсцисс отложены экспериментально-расчетные числовые значения текущей балансировочной скорости горизонтального полета вертолета. Балансировочная скорость горизонтального полета вертолета соответствует скорости полета вертолета, при которой сумма всех внешних сил и моментов, действующих на вертолет в полете, равна нулю. Балансировочную скорость полета вертолет достигает не сразу (из-за инерционности массы вертолета), а спустя некоторое время, после того как уравновесятся все действующие на вертолет внешние силы и моменты. В поле графика фигуры 6 изображены известные экспериментально-расчетные кривые функциональной зависимости, например: Хт=0.36 м и Хт=-0.20 м, которые представлены в виде функции υ=f(V, Хт=const) изменения угла тангажа (υ) в зависимости от величины изменения балансировочной скорости полета вертолета (V) при постоянном значении продольного расстояния от центра масс вертолета до оси несущего винта (при Хт=0.36 м или Хт=-0.20 м). Эти же экспериментально-расчетные кривые функциональной зависимости Хт=0.36 м и Хт=-0.20 м можно рассматривать как V=f(υ, Хт=const) изменение балансировочной скорости полета вертолета (V) в зависимости от изменения угла тангажа (υ) при постоянном значении продольного расстояния от центра масс вертолета до оси несущего винта (при Хт=0.36 м или Хт=-0.20 м). Это означает, что при известном значении угла тангажа и известной экспериментально-расчетной функциональной зависимости Хт всегда можно определить балансировочное значение скорости полета вертолета. Однако текущее входное (в блоке расчета прогнозируемой скорости полета вертолета (ПС) 31) значение Хт(t)- продольного расстояния от центра масс вертолета до оси несущего винта может и не совпадать с экспериментально-расчетными численными значениями, обозначенными как (Хт) на графике фигуры 6. В этом случае в блоке расчета прогнозируемой скорости полета вертолета (ПС) 31 выполняется процедура интерполяции функции υ=f(V, Хт(t)=const). Интерполяция выполняется для всего диапазона экспериментально-расчетных значений балансировочной скорости полета вертолета (V) и текущего (вычисленного в связанной с вертолетом системе координат) числового значения параметра пространственного положения продольного расстояния от центра масс вертолета до оси несущего винта (Хт(t)). На графике фигуры 6 интерполированные значения функции υ=f(V, Хт(t)=const) обозначены пунктирной линией. Совместное решение функции параметров входного текущего значения угла тангажа (υтек) (горизонтальная линия) и входного текущего значения (Хт(t)=const) (пунктирная линия), однозначно определяет числовое значение балансировочной скорости полета вертолета (точка на пунктирной линии и вертикальная прямая на ось абсцисс) - это и есть значение Vпр=Vзад. Изменение летчиком угла тангажа вертолета осуществляется до тех пор, пока индекс заданной скорости полета вертолета 40 не установится на шкале прибора 38 указателя скорости полета вертолета (УС) 37 на новое цифровое значение заданной скорости полета на горизонтальном участке маршрута. В этот момент времени летчик переключателем блоков автопилота функций автоматической стабилизации по тангажу, высоте и скорости (вАП) 23 (фиг.1), (фиг.5) включает в работу в блоке автопилота функций автоматической стабилизации (АС) 25 блок автопилота функции стабилизации по тангажу (Аυ) 26, блок автопилота функции стабилизации по высоте (Ан) 27 и блок автопилота функции стабилизации по скорости (Av) 28. Тем самым летчик возвращает систему управления вертолетом в директорный режим автоматического управления полетом с новыми параметрами стабилизации по углу тангажа, высоте и скорости полета. Прогнозируемая скорость полета вертолета в (БУС) 41 в директорном режиме автоматического управления полетом не вычисляется, т.к. она является стабилизируемым параметром в блоке автопилота функции стабилизации по скорости (Av) 28. Как результат этих действий на экране командно-пилотажного индикатора 1 летчик увидит на индикационном поле 3 экрана 1 изменившуюся фигуру «Лидера» 4, соответствующую Vзад, вычисленной в (БУС) 41 и на навигационном поле 2 экрана 1 указатель скорости полета вертолета (УС) 37 с числовой шкалой 38, индекс указателя текущей скорости полета вертолета 39, индекс указателя заданной скорости полета вертолета 40, которые будут показывать разные числовые значения на шкале указателя скорости 38, т.к. в этот момент времени балансировочная скорость не равна заданной скорости полета вертолета. В момент перехода на директорный режим автоматического управления полетом, из протоколов обмена текущих выходных параметров полета с выхода блока системы автоматического управления полетом (САУП) 10 выбирается последний протокол обмена текущих значений выходных параметров полета:
- время полета на маршруте - Т;
- текущее значение дальности полета ЛА - Хтек,
- текущее значение высоты полета вертолета - Нтек;
- текущее боковое отклонении вертолета - Zтек;
- программно задаваемая высота полета вертолета на исполнение команды «убрать шасси»/«выпустить шасси» - Ншас.
- заданная скорость полета вертолета Vзад;
- текущее значение угла тангажа - υтек;
- инерционно-массовые характеристики Ixx, Iyy, Izz, Ixy, Ixz, Iyz для связанных осей вертолета.
С этого момента времени, последний протокол обмена текущих значений выходных параметров полета является параметрическим описанием начальных условий инерционно-массового и пространственного положения вертолета в точке (пункт S), с которой будет вычислена задаваемая вновь опорная трехмерная траектория полета вертолета до пункта "В" с заданной скоростью полета вертолета Vзад (равной скорости, выбранной для дальнейшего полета по маршруту в блоке расчета прогнозируемой скорости полета вертолета (ПС) 31). Вычисление задаваемой вновь опорной трехмерной траектории полета вертолета осуществляется в блоке навигационного вычислителя исходных данных (НВ ИД) 13 и блоке навигационного вычислителя расчетных данных (НВ ИД) 14. Блок автопилота функций автоматической стабилизации (АС) 25 принимает вновь задаваемые значения параметров полета на маршруте по высоте, скорости и углу тангажа, как начальные условия для их стабилизации. Дальнейший директорный режим автоматического полета своего вертолета летчик контролирует, наблюдая на индикационном поле 3 экрана 1 изменение положения и формы геометрических фигур индексов «Лидер» 4 и «Самолет» 5, а на навигационном поле 2 экрана 1 в указателе скорости полета вертолета (УС) 37 с числовой шкалой 38, индексом указателя текущей скорости полета вертолета 39, индексом указателя заданной скорости полета вертолета 40 как перемещается индекс текущей скорости полета 39 к новому числовому значению Vзад на шкале 38 указателя скорости (УС) 37 до совпадения указателя индекса Утек текущей скорости полета вертолета с указателем индекса заданной скорости полета вертолета Vзад, на которое указывает индекс заданной скорости полета вертолета 40, в режиме летчика-оператора (заданная скорость равна балансировочной скорости). Геометрический размер индекса «Лидер» 4 будет изменяться в зависимости от величины отклонения текущей скорости полета вертолета относительно величины заданной скорости полета Vзад. Разность скоростей ΔV=(Vзад-Vтек) определяет коэффициент масштаба скорости полета ЛА - mV из блока вычисления коэффициента скорости полета вертолета 19. Когда текущее значение вектора скорости ЛА Vтек меньше программно заданного вектора скорости ЛА Vзад, индекс "Лидер" 4 уменьшится в размерах - "удалится". Когда текущее значение вектора скорости ЛА Vтек больше программно заданного вектора скорости ЛА Vзад, индекс "Лидер" 4 увеличится в размерах - "приблизится". При позиции переключателя блоков автопилота функций автоматической стабилизации по тангажу, высоте и скорости (вАП) 23 в положение «0-2» - «Автомат» - директорное автоматическое управление» при условии текущего значения вектора скорости ЛА Vтек меньше программно заданного вектора скорости ЛА Vзад индекс "Лидер" 4 будет увеличиваться в размерах при увеличении текущей скорости полета вертолета. При значении текущего значения вектора скорости ЛА Vтек больше программно заданного вектора скорости ЛА Vзад индекс "Лидер" 4 будет уменьшаться в размерах при уменьшении текущей скорости полета вертолета. Процесс управления вертолетом при переходе с одного числового значения скорости полета вертолета на другое числовое значение скорости полета вертолета с использованием заявляемого командно-пилотажного индикатора вертолета наглядно изображен на диаграмме управления вертолетом (фиг.7). Процесс управления вертолетом при переходе с одного значения скорости полета вертолета без использования заявляемого командно-пилотажного индикатора наглядно изображен на диаграмме управления вертолетом (фиг.8). Из анализа диаграмм видно, что на участке горизонтального полета АВ, который осуществляется в директорном режиме автоматического управления полетом. В определенный момент времени нахождения вертолета в точке «S» траектории АВ летчик получает команду на изменение числового значения скорости полета вертолета. Из представленных диаграмм видно, что переход на новую скорость полета вертолета в заявляемом устройстве осуществляется за один переход (SM) и скорость выполнения этого перехода определяется (зависит) от быстродействия блока вычисления прогнозируемой скорости полета вертолета и выполняется в директорном режиме ручного управления полетом путем воздействия пилота на органы управления вертолетом и занимает несколько секунд, после чего внимание летчика освобождается для выполнения поставленной задачи. Если бы летчик не использовал заявляемое устройство, то на этапе SM летчику потребуется органами управления вертолетом в вертикальной плоскости по тангажу и высоте (ОУ) 24 очень аккуратно изменять текущий угол тангажа, постоянно и медленно корректируя по приборам угол тангажа, и чередовать взгляд с осмотра других навигационных приборов со взглядом на указатель скорости полета вертолета, чтобы наблюдать переход указателя текущей скорости полета вертолета в новую позицию числового значения. От летчика требуется большой опыт и мастерство, чтобы управлять вертолетом выполняя эту команду. Процесс действия органами управления, взгляд на прибор угла тангажа, на другие навигационные приборы и выдерживание вертолета до балансировочного полета, повторяется многократно и занимает от 20 до 60 секунд полета. Это простой, в общем-то, процесс сильно усложняется и становится опасным при пилотировании только по приборам в сложных метеоусловиях и условиях синдрома эмоционального выгорания. Возможность управления полетом вертолета с предлагаемым командно-пилотажным индикатором (КПИ), в котором дополнительно используются: блок учета расхода в полете массы полезной нагрузки вертолета (например: топливо, грузы, боезапас) (РПН) 33, блок вычисления в связанной с вертолетом системе координат пространственного положения центра масс, моментов инерции вертолета в полете и значение параметра продольного расстояния от центра масс вертолета до оси несущего винта (ЦМ) 32, переключатель стабилизирующих функций автопилота по тангажу, высоте и скорости (вАП) 23, массив данных формируемый протоколом обмена в блоке системы автоматического управления полетом (САУП) 10; блок расчета прогнозируемой скорости полета вертолета (ПС) 31, блок, индицирующий указатель скорости полета вертолета (БУС) 41, визуализация на навигационном поле 2 экрана 1 (КПИ) 9 прибора указателя скорости полета вертолета (УС) 37 с числовой шкалой 38 с индексом указателя текущей скорости полета вертолета 39 и индексом указателя заданной скорости полета вертолета 40 обеспечивает летчику:
- повышение безопасности и упрощение пилотирования вертолетом на горизонтальном участке маршрута за счет повышения информационной наглядности представления на экране КПИ заданной скорости полета вертолета и снятия психофизиологической нагрузки с летчика в процессе изменения текущей скорости полета, при переходных скоростных режимах полетов с одного числового значения текущей скорости полета вертолета на другое числовое значение скорости полета вертолета в условиях синдрома эмоционального выгорания (эмоциональные нагрузки, вибрации, нехватка кислорода, перепады давления, дефицит времени на принятие решения, полет на малой высоте и другие аналогичные факторы);
- упрощение контроля выполнения программных режимов полета.
| название | год | авторы | номер документа |
|---|---|---|---|
| Командно-пилотажный индикатор вертолета | 2021 |
|
RU2778955C1 |
| КОМАНДНО-ПИЛОТАЖНЫЙ ИНДИКАТОР | 2018 |
|
RU2711196C1 |
| КОМАНДНО-ПИЛОТАЖНЫЙ ИНДИКАТОР | 2019 |
|
RU2716886C1 |
| КОМАНДНО-ПИЛОТАЖНЫЙ ИНДИКАТОР | 2011 |
|
RU2474862C1 |
| КОМАНДНО-ПИЛОТАЖНЫЙ ИНДИКАТОР ВЕРТОЛЕТА | 2020 |
|
RU2778716C2 |
| СИСТЕМА ИНДИКАЦИИ ВЗЛЕТА И ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2016 |
|
RU2647344C2 |
| КОМАНДНО-ПИЛОТАЖНЫЙ ИНДИКАТОР | 2002 |
|
RU2207514C1 |
| СПОСОБ УПРАВЛЕНИЯ САМОЛЕТОМ ПРИ ЗАХОДЕ НА ПОСАДКУ | 2004 |
|
RU2267747C1 |
| СПОСОБ УПРАВЛЕНИЯ САМОЛЕТОМ ПРИ ЗАХОДЕ НА ПОСАДКУ | 2011 |
|
RU2478523C2 |
| Способ интегрального отображения параметров полётной ситуации | 2019 |
|
RU2722888C1 |
Изобретение относится к области авиации, в частности к устройствам отображения информации. Командно-пилотажный индикатор вертолета содержит экран, на котором индицируются неподвижный относительно центра отсчетный индекс «Самолет», обозначающий текущее положение вертолета в пространстве, и подвижный индекс "Лидер", имеющий возможность поворота вокруг своего центра симметрии, а также перемещения по вертикали и горизонтали относительно индекса "Самолет" и обозначающий требуемое положение в пространстве, генератор символов, соединенный с экраном, средства управления подвижным индексом "Лидер", выполненные в виде блока вычисления характеристик "Лидера". Индексы "Самолет" и "Лидер" выполнены с возможностью одновременного отображения угла скольжения и угла тангажа, путем индикации треугольника, основание которого равно длине горизонтальной прямой линии, символизирующей крылья ЛА, а положение вершины треугольника соответствует текущему значению угла тангажа и угла скольжения индекса "Самолет" и отклонению от заданного значения угла тангажа и угла скольжения индекса «Лидер». Командно-пилотажный индикатор дополнительно снабжен блоком учета расхода в полете массы полезной нагрузки вертолета, блоком, индицирующим указатель скорости полета вертолета, индексами указателей текущей и заданной скоростей, блоком вычисления положения центра масс, моментов инерции. Достигается повышение безопасности и упрощение пилотирования вертолета на горизонтальном участке маршрута в процессе изменения текущей скорости полета. 8 ил.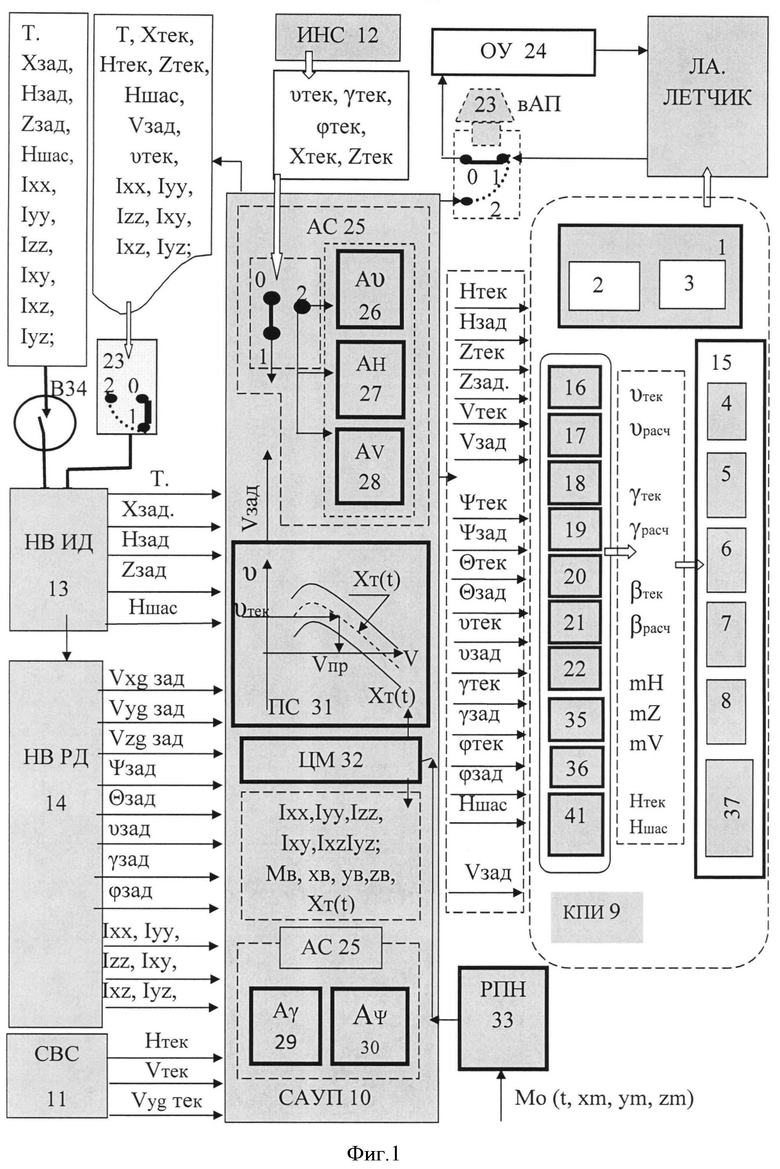
Командно-пилотажный индикатор вертолета, содержащий экран, на котором индицируются неподвижный относительно центра индикационного поля экрана отсчетный индекс "Самолет", выполненный в виде одной горизонтальной прямой, символизирующей крылья летательного аппарата (ЛА), и одной вертикальной прямой, символизирующей киль ЛА, и пересекающей горизонтальную прямую в ее центре под прямым углом, имеющий возможность поворота вокруг своего центра симметрии и обозначающий текущее положение вертолета в пространстве, индицируемый на экране подвижный индекс "Лидер", выполненный в виде одной горизонтальной прямой, символизирующей крылья ЛА, и одной вертикальной прямой, символизирующей киль ЛА, и пересекающей горизонтальную прямую в ее центре под прямым углом, имеющий возможность поворота вокруг своего центра симметрии, а также перемещения по вертикали и горизонтали относительно индекса "Самолет" и обозначающий требуемое положение в пространстве, генератор символов, соединенный с экраном, средства управления подвижным индексом "Лидер", выполненные в виде блока вычисления характеристик "Лидера", а именно блока вычисления параметров текущего угла скольжения, блока вычисления значения расчетного угла крена, блока вычисления расчетного угла скольжения, блока расчета отклонения ЛА по высоте полета и коэффициента масштаба отклонения высоты полета ЛА, блока вычисления значения расчетного угла тангажа, блока расчета бокового отклонения и коэффициента масштаба бокового отклонения ЛА, на входы которых поступают сигналы из систем ЛА, а с выходов которых на генератор символов поступают сигналы в соответствии с величиной ошибки управления по высоте, обеспечивающие перемещение индекса "Лидер" по индикационному полю в вертикальном направлении, с возможностью индикации индекса "радиовысота" и неподвижной неравномерной шкалы значения высоты полета, индицируемой на вертикальной стороне границы индикационного поля экрана с нулевым значением высоты, расположенным на уровне горизонтальной линии, проходящей через центр индикационного поля экрана, при этом индекс "Самолет" и индекс "Лидер" выполнены с возможностью одновременного отображения угла скольжения и угла тангажа, путем индикации треугольника, основание которого равно длине горизонтальной прямой линии, символизирующей крылья ЛА, а положение вершины треугольника соответствует текущему значению угла тангажа и угла скольжения индексом "Самолет" и отклонению от заданного значения угла тангажа и угла скольжения индексом "Лидер" поворотом индекса "Лидер" вокруг центра симметрии в соответствии с величиной ошибки по углу крена, увеличением или уменьшением линейных размеров индекса «Лидер» при увеличении или уменьшении, соответственно, заданной скорости полета таким образом, что при нулевых значениях ошибок по всем контролируемым параметрам индекс "Лидер" совмещается с индексом "Самолет", отличающийся тем, что дополнительно снабжен блоком учета расхода в полете массы полезной нагрузки вертолета, блоком, индицирующим указатель скорости полета вертолета, указателем скорости полета вертолета с числовой шкалой, индексом указателя текущей скорости полета вертолета, индексом указателя заданной скорости полета вертолета, блоком вычисления в связанной с вертолетом системе координат пространственного положения центра масс, моментов инерции вертолета в полете и значения параметра продольного расстояния от центра масс вертолета до оси несущего винта, блоком расчета прогнозируемой скорости полета вертолета и переключателем блоков автопилота функций автоматической стабилизации по тангажу, высоте и скорости, причем вход блока учета расхода в полете массы полезной нагрузки вертолета соединен с системами ЛА по параметрам расходуемой в полете массы полезной нагрузки вертолета, а выход соединен с входом блока вычисления в связанной с вертолетом системе координат пространственного положения центра масс, моментов инерции вертолета в полете и значение параметра продольного расстояния от центра масс вертолета до оси несущего винта по параметру расходуемой в полете полезной нагрузки вертолета, выход которого соединен с первым входом блока расчета прогнозируемой скорости полета вертолета по параметру продольного расстояния от центра масс вертолета до оси несущего винта, а второй вход блока расчета прогнозируемой скорости полета вертолета соединен через переключатель блоков автопилота функций автоматической стабилизации по тангажу, высоте и скорости по параметру текущего значения угла тангажа, а выход блока прогнозируемой скорости полета вертолета по параметру заданной скорости полета вертолета и выход блока системы автоматического управления полетом по параметру текущей скорости полета вертолета соединены с входом блока, индицирующего указатель скорости полета вертолета, выход которого соединен с генератором символов, который выполнен с возможностью индикации прибора указателя скорости полета вертолета с числовой шкалой и индексом указателя текущей скорости полета вертолета и индексом указателя заданной скорости полета вертолета.
| КОМАНДНО-ПИЛОТАЖНЫЙ ИНДИКАТОР | 2011 |
|
RU2474862C1 |
| КОМАНДНО-ПИЛОТАЖНЫЙ ИНДИКАТОР | 2002 |
|
RU2207514C1 |
| СПОСОБ ЛЕЧЕНИЯ СИНДРОМА "ДИАБЕТИЧЕСКАЯ СТОПА" | 1997 |
|
RU2154484C2 |
| US 8271151 B2, 18.09.2012 | |||
| Реактивный двигатель | 1935 |
|
SU47509A1 |

