Изобретение относится к судостроению и предназначено для автоматического управления движением морского судна.
Известно устройство (А. с. СССР 460535), обеспечивающее автоматическое удержание судна на заданном курсе. Стабилизация курса осуществляется по данным гирокомпаса, который является основным источником информации о направлении движения судна. Сигнал текущего курса и его производная поступают на вход вычислителя (суммирующего устройства), на вход которого поступает также сигнал с датчика угла перекладки руля.
Этот авторулевой обладает следующими недостатками:
- перегружает рулевой привод при развитом морском волнении;
- сигнал угла курса, вырабатываемый гирокомпасом, зашумлен и при дифференцировании не удается получить сигнал производной курса с требуемыми динамическими качествами, что исключает применение его на неустойчивых на курсе судах;
- нет сигнала угла дрейфа, что приводит к параллельному уходу судна с заданного направления движения при боковом ветре или течении.
Известна также "Аппаратура автоматического управления движением судна" (патент России 2144884, кл. В 63 Н 25/04), принятая нами в качестве прототипа, содержащая задатчик направления движения, датчик угла перекладки руля, выходы которых подключены к вычислителю (суммирующему усилителю). К вычислителю также подключены:
- сигнал путевого угла (ПУ) с выхода приемника спутниковой навигационной системы (СНС);
- сигнал угла перекладки руля (δ);
- сигнал угловой скорости (производной путевого угла ω=d/dt ПУ);
- сигнал угла дрейфа (β).
Выход вычислителя подключен к входу рулевого привода, последний, отклоняя кормовой руль, удерживает судно на заданном направлении движения.
Эта аппаратура автоматического управления движением судна обеспечивает автоматическое управление движением малотоннажного судна, но при развитом морском волнении часто перегружает рулевой привод и снижает скорость хода. Установка аппаратуры на крупнотоннажные и речные суда, неустойчивые на курсе, не обеспечивает требуемой точности удержания судна на заданном направлении движения.
Прототип имеет следующие недостатки:
- большая загрузка рулевого привода, приводящая к перегреву,
- при развитом морском волнении растет сопротивление движению судна, что приводит к потере скорости хода с увеличением расхода топлива и времени рейса.
В предложенной нами аппаратуре автоматического управления движением судна отмеченные выше недостатки устранены.
Задачей, решаемой настоящим изобретением, является создание аппаратуры для автоматического управления движением судна, обеспечивающей заданную точность стабилизации судна и сниженную загрузку рулевого привода, которая приводит к снижению сопротивления движению судна и экономии топлива.
Поставленная задача достигается тем, что в аппаратуру, содержащую:
задатчик путевого угла, датчик угла перекладки руля, рулевой привод, приемник спутниковой навигационной системы (СНС) и сумматор (вычислитель), дополнительно введен блок логики с реле, нормально-замкнутые контакты которого при срабатывании отключают рулевой привод. Срабатывание реле происходит при выполнении логических условий благодаря использованию: двух логических ячеек И, логической ячейки ИЛИ, двух дифференциаторов и восьми диодов.
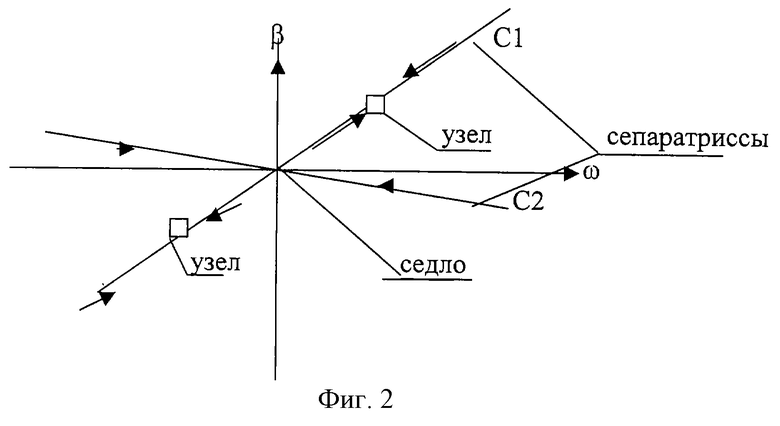
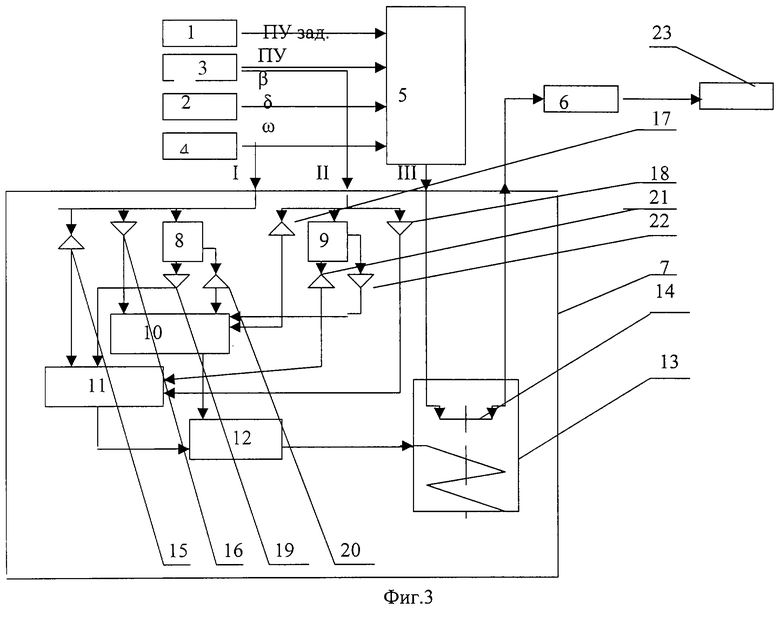
Изобретение поясняется чертежами, где на фиг.1 приведена диаграмма управляемости устойчивого и неустойчивого на курсе судна, на фиг.2 - фазовый портрет неустойчивого на курсе судна и на фиг.3 - структурная схема предлагаемой аппаратуры автоматического управления движением судна.
Методические особенности решения поставленной задачи
Построение оптимальных (близких к оптимальным в смысле точности стабилизации) законов управления неустойчивыми на курсе судами
Неустойчивые на курсе суда при построении фазового портрета в координатах угол дрейфа β - угловая скорость судна ω обладают "фазовым пятном" (по терминологии, предложенной М.И.Фейгиным).
Нахождение судна в области фазового пятна в фазовом пространстве β-ω свидетельствует о потере управляемости (изменении знака управляющего момента от воздействия руля).
Для обеспечения эффективного управления неустойчивым на курсе судном необходимо выполнить ряд дополнительных требований как к необходимой информации (источникам измерений фазового состояния судна), так и к исполнительным органам.
На фиг.1 приведены диаграммы управляемости устойчивого на курсе судна - "а" и неустойчивого на курсе судна - "б".
Из диаграммы следует, что характер управления устойчивым и неустойчивым на курсе судном коренным образом отличается.
Фазовый портрет для неустойчивого на курсе судна при нулевом угле перекладки руля приведен на фиг.2. В зоне неоднозначного управления на фазовом портрете в плоскости β-ω наблюдаются три состояния равновесия: неустойчивое - типа "седло" и два устойчивых - типа "узел". С увеличением угла перекладки руля (δ) седло и один из узлов сближаются, сливаясь при бифуркационном значении: δ = δ1.
Рассмотрение фазового портрета (фиг.2) позволяет дополнить существующие законы управления логическими условиями, с целью сокращения загрузки рулевого привода и уменьшения сопротивления движению судна.
Из фазового портрета следует, что если судно находится вблизи сепаратриссы С2, то оно без какого-либо управления само будет двигаться в направлении к "седлу" с уменьшением амплитуды угловой скорости судна. В этом фазовом состоянии судна автоматическое управление следует приостановить (d/dt δ= 0) и включить закон управления только в момент, когда судно достигнет изоклины (d/dt ω=0) на плоскости фазовых координат β-ω.
Таким образом, при наличии измерений угла дрейфа и угловой скорости судна появляется возможность повысить качество управления судна, дополнив широко распространенный закон управления вида:
d/dt δ = К1•(ПУ - ПУзад.) + К2•ω - К3•δ (1)
логическими условиями:
Таким образом, решением поставленной задачи может быть введение в типовой закон автоматического управления движением судна по заданному направлению (1) дополнительного логического условия (2).
Достоинства предложенной "Аппаратуры...":
- существенно сокращается количество перекладок руля в единицу времени,
- снижается сопротивление движению судна, а следовательно, сокращается расход топлива при выполнении рейса и время выполнения рейса.
Функциональная схема "аппаратуры автоматического управления движением судна" приведена на фиг.3. и включает: задатчик ПУ 1, датчик угла перекладки руля 2, приемник СНС 3, блок выработки сигнала угловой скорости 4, сумматор 5, рулевой привод 6, блок логики 7, первый и второй дифференциаторы 8, 9, первую и вторую логические ячейки типа И 10, 11, логическую ячейку типа ИЛИ 12, реле 13, нормально-замкнутую контактную группу 14, первый-восьмой диоды 15-22, судно 23.
В качестве задатчика 1 и датчика 2 угла перекладки руля может быть использован любой аналоговый (цифровой), серийно выпускаемый преобразователь угла поворота с точностью не ниже 0,5%. Приемник СНС 3, может использоваться из аппаратуры японской фирмы Furuno Elektric Co.LTD. "Model SC-120" или типа МРК-11 для спутниковых навигационных систем из угломерной аппаратуры ГЛОНАС и GPS, разработки НИИ радиотехники Красноярского государственного технического университета. Блок выработки сигнала угловой скорости 4 может быть выполнен в виде типового датчика угловой скорости с чувствительностью по угловой скорости судна не ниже 0,01 град/с.
Сумматор 5 в аналоговом варианте - это усилитель типа интегральной микросхемы 140УД6. Блок логики 7 (может быть реализован в аналоговом варианте) с использованием: типовых дифференциаторов 8, 9, типовых логических ячеек И 10, 11, ИЛИ 12, электромагнитного реле 13 с нормально-замкнутой контактной группой 14 и диодов 15-22. Дифференциаторы 8, 9 - интегральные микросхемы типа 140УД8 с подключенным на вход конденсатором с малыми утечками. Возможен также цифровой вариант реализации перечисленных выше блоков на серийном микроконтроллере. Задатчик 1, датчик 2, первый выход приемника СНС 3 и блок 4 подключены к входам суммирующего усилителя 5, выход которого подключен к входу рулевого привода 6 через третий вход блока логики 7 и нормально-замкнутую контактную группу 14. Схема подключения положительных и отрицательных выводов диодов приведена на фиг. 3.
"Аппаратура..." работает следующим образом.
Требуемое направление движения судна задается задатчиком путевого угла 1. Если это направление движения судна не совпадает с текущим направлением, то на выходе суммирующего усилителя 5 появится сигнал, приводящий к отклонению руля судна рулевым приводом 6, после чего начинается поворот судна к заданному направлению движения. При достижении судном заданного направления движения руль вернется в балансировочное положение.
Рассмотрим, как формируется закон управления (1) рулевым приводом 6. Сигнал, пропорциональный заданному направлению движения судна, ПУзад. поступает с задатчика ПУ 1 на первый вход сумматора 5, сигнал текущего путевого угла вырабатывается на первом выходе приемника СНС 3 и поступает на второй вход сумматора 5. На выходе сумматора 5 при этом будет формироваться сигнал отклонения судна от заданного направления движения:
ΔПУ = ПУ - ПУзад.
Сигналы с выходов датчика угла перекладки руля 2 и блока выработки сигнала угловой скорости 3, поступающие на третий и четвертый входы сумматора 5, необходимы для обеспечения заданной точности стабилизации судна, а также для обеспечения требуемого запаса устойчивости замкнутой системы управления: ""аппаратура..." - рулевой привод - судно".
Таким образом формируется закон управления рулем судна:
d/dt δ = К1•ΔПУ + К2•ω - К3•δ,
где d/dt δ,δ - скорость перекладки и угол перекладки руля соответственно,
ΔПУ = ПУ - ПУзад. - отклонение судна с заданного путевого угла,
ω - угловая скорость судна,
К1-К3 - коэффициенты регулирования.
Для снижения загрузки рулевого привода 6 закон (1) дополняется логическим условием (2), при выполнении которого закон управления (1) отключается и руль удерживается в прежнем состоянии, пока не нарушится условие (2), после чего вновь включится закон управления рулевым приводом (1).
Рассмотрим как вырабатывается условие (2) в блоке логики 7. Сигнал угловой скорости ω с выхода блока 4 поступает через первый вход блока логики 7 на первый дифференциатор 8, на выходе которого формируется сигнал производной d/dt ω. Если сигнал ω >0 (при положительном значении ω), то он проходит через второй диод 16 на первый вход первого логического элемента И 10, и если при этом сигнал d/dt ω<0 ( отрицательный сигнал d/dt ω), то он пройдет через шестой диод 20 на второй вход первого логического элемента И 10 (это окажется предпосылкой для срабатывания блока 10). Срабатывание логической ячейки И 10 произойдет, если на третий и четвертый входы ячейки 10 в это же время поступят два сигнала: угол дрейфа β<0 с второго выхода приемника СНС 3 через второй вход блока логики 7 и третий диод 17 на третий вход, а скорость изменения угла дрейфа d/dt β>0 поступит с выхода второго дифференциатора 9 через восьмой диод 22 на четвертый вход первого логического элемента И 10. В этом случае с выхода первого логического элемента И 10 сигнал "логическая единица" поступит через логический элемент ИЛИ 12 на срабатывание реле 13, при этом нормально-замкнутая контактная группа 14 разомкнется и выход сумматора 5 (проходящий через третий вход блока логики 7 на контактную группу 14 и далее через выход блока логики 7 на вход рулевого привода) отключится от рулевого привода.
Мы рассмотрели выполнение первой части условия (2):
d/dt δ=0 при d/dt ω<0 и d/dt β>0 и ω>0 и β<0.
Рассмотрим как происходит отключение рулевого привода при выполнении второй части условия (2):
d/dt δ=0 при d/dt ω>0 и d/dt β<0 и ω<0 и β>0,
Отличие от первого случая в том, что срабатывает второй логический элемент И 11 (при одновременном прохождении сигналов через первый 15, четвертый 18, пятый 19 и седьмой 21 диоды), срабатывание которого через логический элемент ИЛИ 12 приводит к срабатыванию реле 13.
Проведенное моделирование, приведенных выше законов (1), (2), подтвердило возможность получения высокоэффективной аппаратуры автоматического управления движением судна как в отношении точности стабилизации судна на заданном путевом угле, так и в отношении обеспечения требуемого запаса устойчивости замкнутой системы. При существенном сокращении (почти в 1,9 раза) количества перекладок руля в единицу времени.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОРУЛЕВОЙ С ОЦЕНКОЙ УГЛОВОЙ СКОРОСТИ | 2004 |
|
RU2269451C1 |
| АППАРАТУРА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 2002 |
|
RU2221728C1 |
| АППАРАТУРА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 2003 |
|
RU2223197C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 2003 |
|
RU2240953C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 1998 |
|
RU2150409C1 |
| СПОСОБ ШВАРТОВКИ СУДНА | 2006 |
|
RU2330789C1 |
| АППАРАТУРА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 1999 |
|
RU2155142C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 2005 |
|
RU2301174C1 |
| АППАРАТУРА АВТОМАТИЧЕСКОГО РАСХОЖДЕНИЯ СУДНА СО ВСТРЕЧНЫМ ОБЪЕКТОМ | 2008 |
|
RU2376194C1 |
| УСТРОЙСТВО ИСКЛЮЧЕНИЯ СТОЛКНОВЕНИЯ СУДНА С ВСТРЕЧНЫМ ДВИЖУЩИМСЯ ОБЪЕКТОМ | 2008 |
|
RU2383464C1 |
Изобретение относится к судостроению и предназначено для автоматического управления движением морского судна. Аппаратура автоматического управления движением судна содержит задатчик путевого угла, датчик угла перекладки руля, приемник спутниковой навигационной системы, блок выработки сигнала угловой скорости и рулевой привод. Выходы всех четырех блоков соответственно подсоединены к четырем входам сумматора. Кроме того, аппаратура содержит блок логики, включающий два дифференциатора, две логических ячейки типа И, логическую ячейку типа ИЛИ, реле с нормально замкнутой контактной группой и восемь диодов. При срабатывании реле отключается рулевой привод. Срабатывание реле происходит при выполнении логических условий благодаря использованию двух логических ячеек И, логической ячейки ИЛИ, двух дифференциаторов и восьми диодов. Обеспечивается заданная точность стабилизации судна и снижение загрузки рулевого привода. 3 ил.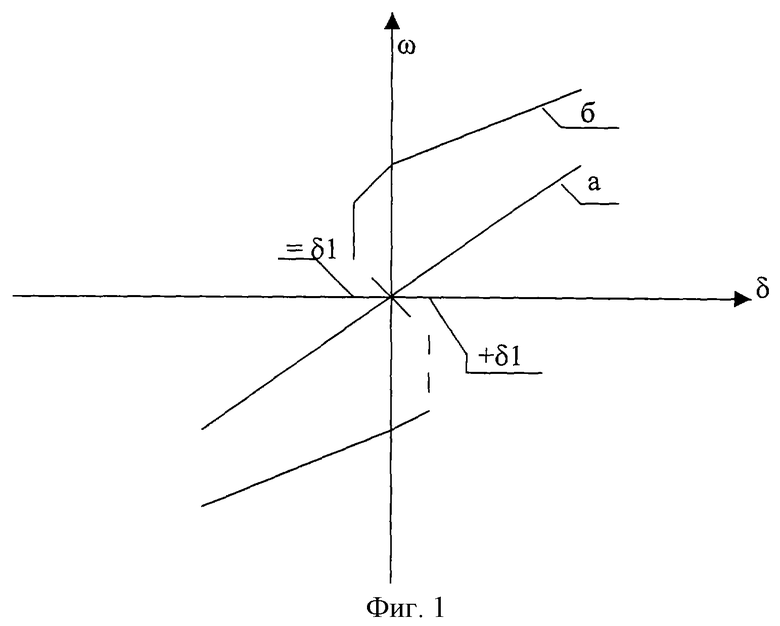
Аппаратура автоматического управления движением судна, содержащая задатчик путевого угла, датчик угла перекладки руля, приемник спутниковой навигационной системы, блок выработки сигнала угловой скорости, выходы всех четырех блоков соответственно подсоединены к четырем входам сумматора, и рулевой привод, отличающаяся тем, что дополнительно содержит блок логики, включающий два дифференциатора, две логических ячейки типа И, логическую ячейку типа ИЛИ, реле с нормально замкнутой контактной группой и восемь диодов, выход блока выработки сигнала угловой скорости соединен через первый вход блока логики соответственно со входом первого дифференциатора, отрицательным выводом первого диода и положительным выводом второго диода, второй выход приемника спутниковой навигационной системы через второй вход блока логики соответственно соединен с входом второго дифференциатора, отрицательным выводом третьего диода и положительным выводом четвертого диода, первый и второй выходы первого дифференциатора соединены соответственно с положительным выводом пятого диода и отрицательным выводом шестого диода, первый и второй выходы второго дифференциатора соединены соответственно с отрицательным выводом седьмого диода и положительным выводом восьмого диода, первый-четвертый входы первой логической ячейки типа И соединены соответственно с отрицательными выводами второго и восьмого диодов, с положительными выводами третьего и шестого диодов, первый-четвертый входы второй логической ячейки типа И соединены соответственно с положительными выводами первого и седьмого диодов, с отрицательными выводами пятого и восьмого диодов, выходы первой и второй логических ячеек типа И через логическую ячейку типа ИЛИ соединены с обмоткой реле, нормально замкнутая контактная группа которого соединена через третий вход блока логики с выходом сумматора, а через выход блока логики соединена с входом рулевого привода.
| АППАРАТУРА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 1998 |
|
RU2144884C1 |
| Автоматизированная система управления рулевым приводом судна | 1989 |
|
SU1654132A1 |
| US 3927635 A, 23.12.1975 | |||
| US 3946690 A, 30.03.1976. | |||

