Изобретение относится к области автоматического управления подвижными объектами, в частности движением морских судов.
Известно устройство для управления движением судна [1], в котором формируется ПИД-закон управления, сигнал производной получается путем дифференцирования сигнала угла рассогласования по курсу.
Недостатком устройства является сильная зашумленность сигнала угловой скорости судна, что приводит к снижению запаса устойчивости рассматриваемой системы регулирования и слишком большим нагрузкам на рулевой привод при развитом морском волнении.
Устройство [2] отличается от устройства [1] более совершенным переходом с режима маневра на режим стабилизации курса судна, для чего используется блок упрощенной модели судна, с помощью которой удается вырабатывать заданное значение курса, равное будущему "предсказанному" значению по окончании переходного процесса. Устройству [2] присущи недостатки устройства [1].
Известна также система стабилизации курса судна [3], принятая в качестве прототипа, содержащая датчики курса и угла перекладки руля, датчик углового ускорения, выполненный в виде двух разнесенных по судну линейных акселерометров, интеграторов и сумматоров для выработки сигнала угловой скорости судна, и суммирующий усилитель для управления рулевым приводом.
Недостатком системы является корректировка восстановленного сигнала угловой скорости по невязке восстановленного угла рыскания и измеренного приращения угла курса.
Цель изобретения - повышение надежности функционирования устройства путем снижения уровня шумов в тракте управления рулевым приводом.
Для этого в устройство, содержащее датчик перекладки руля и задатчик угловой скорости, выходы которых подключены соответственно к первому и второму входам сумматора-усилителя, выход которого подключен к рулевому приводу, датчик углового ускорения, выход которого подключен к третьему входу сумматора-усилителя и через первый интегратор соединен с четвертым входом сумматора-усилителя, введены первый сумматор, датчик скорости хода и блок восстановления угловой скорости, содержащий второй, третий и четвертый интеграторы, пять множителей и второй сумматор.
Указанные выше отличительные признаки в совокупности обеспечивают появление в заявляемом объекте ряда новых свойств, заключающихся в существенном повышении надежности и качества автоматического управления морским судном. Повышение надежности и качества достигается восстановлением угловой скорости путем интегрирования сигнала углового ускорения и исключения смещения в восстановленном сигнале благодаря введению на вход интегратора невязки восстановленной угловой скорости с блока восстановления и угловой скорости с выхода интегратора.
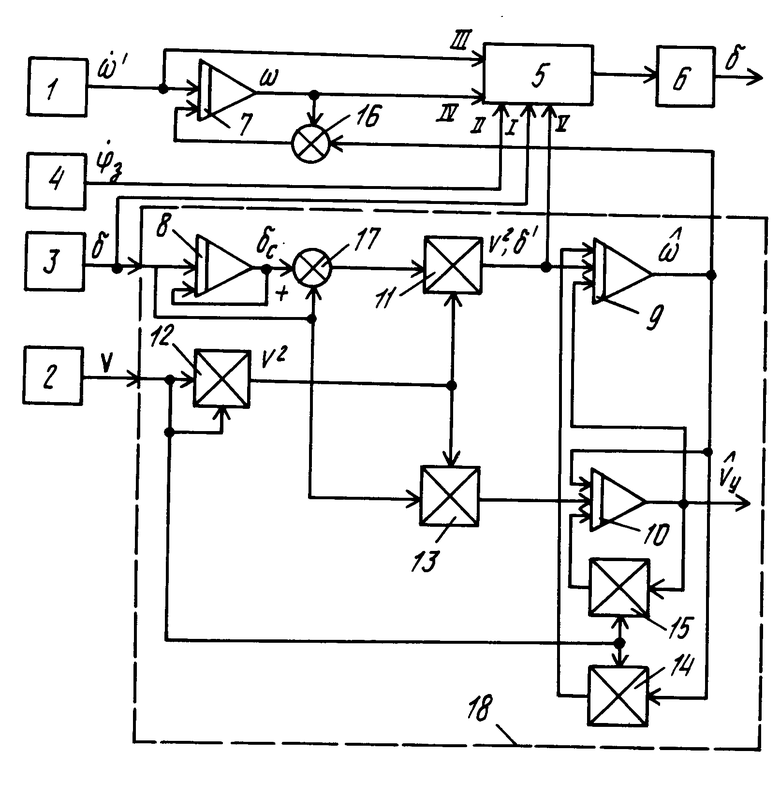
На чертеже приведена схема предлагаемого устройства управления угловым движением судна.
Устройство содержит датчик 1 углового ускорения, датчик 2 скорости хода, датчик 3 перекладки руля, задатчик 4 угловой скорости, сумматор-усилитель 5, рулевой привод 6, четыре интегратора 7-10, пять блоков 11-15 перемножения, два сумматора 16, 17 и блок 18 восстановления угловой скорости, входы которого соединены с датчиками перекладки руля и скорости хода, а выходы - с входами усилителя-сумматора 5. Датчик 1 углового ускорения подключен через интегратор 7 и сумматор-усилитель 5 к входу регулятора рулевого привода 6. Второй выход блока 18 восстановления угловой скорости через первый сумматор 16 соединен с вторым входом интегратора 7, а второй вход сумматора 17 соединен с выходом интегратора 7.
В процессе движения судна по заданному направлению руль должен находиться в баллансировочном положении. Среднее значение угла перекладки, соответствующее положению, при котором среднее значение внешнего возмущающего момента компенсируется средним управляющим моментом, создаваемым рулем
M = M
= M
M = Kδср
= Kδср
δср=  (1)
(1)
Среднее значение угла перекладки руля δср вычисляется на интеграторе 8, охваченном слабой отрицательной обработкой связью. На выходе сумматора 17 вырабатывается текущий угол перекладки руля относительно балансировочного положения
δ′=δ-δср (2)
На интеграторах 9 и 10 совместно с блоками 11-15 перемножения формируется оценка угловой скорости судна = C
= C V + C
V + C + C3V2δ′ (на входе интегратора 9);
+ C3V2δ′ (на входе интегратора 9); = C
= C + C
+ C V + C6V2δ (на входе интегратора 10), где Ci- постоянные коэффициенты;
V + C6V2δ (на входе интегратора 10), где Ci- постоянные коэффициенты;
δ- угол перекладки руля;
δ′- угол перекладки руля, смещенный на величину δср .
Сигнал текущей скорости хода с датчика 2 поступает на два входа блока 12 перемножения, на выходе которого вырабатывается сигнал квадрата скорости хода, который поступает на первые входы блоков 11 и 13 перемножения. На вторые входы блоков 11 и 13 поступает сигнал δ′ и δ , таким образом формируются сигналы C3V2δ, и C6V2 δ . Сигналы C Vи C5VyV вырабатываются на выходах блоков 14 и 15 перемножения и поступают соответственно на входы интеграторов 9 и 10. Выходной сигнал оценки угловой скорости судна с интегратора 9 поступает на первый вход сумматора 16, на второй (инверсный) вход которого поступает с выхода интегратора 7 сигнал угловой скорости, а на выходе сумматора 16 формируется невязка вида
Vи C5VyV вырабатываются на выходах блоков 14 и 15 перемножения и поступают соответственно на входы интеграторов 9 и 10. Выходной сигнал оценки угловой скорости судна с интегратора 9 поступает на первый вход сумматора 16, на второй (инверсный) вход которого поступает с выхода интегратора 7 сигнал угловой скорости, а на выходе сумматора 16 формируется невязка вида
ω -  (3)
(3)
Невязка (3) и выход с датчика 1 углового ускорения поступают на вход интегратора 7. Таким образом формируется несмещенный сигнал угловой скорости путем интегрирования сигнала углового ускорения: =
=  + K(ω -
+ K(ω -  ) где
) где  - сигнал углового ускорения, снимаемый с датчика 1;
- сигнал углового ускорения, снимаемый с датчика 1; - сигнал на входе интегратора 7.
- сигнал на входе интегратора 7.
Таким образом, наличие блока 18 восстановления угловой скорости позволяет устранять дрейф в сигнале  после интегрирования углового ускорения с датчика 1.
после интегрирования углового ускорения с датчика 1.
Для формирования закона управления рулевым приводом на вход сумматора-усилителя 5 поступает сумма сигналов  , которая поступает на вход рулевого привода 6:
, которая поступает на вход рулевого привода 6: = K1δ + K
= K1δ + K + (
+ ( -
-  ) - KзV2δ где К1˙δ - вырабатывается на выходе датчика 3;
) - KзV2δ где К1˙δ - вырабатывается на выходе датчика 3; - сигнал задания скорости циркуляции судна с задатчика 4;
- сигнал задания скорости циркуляции судна с задатчика 4;
K - сигнал углового ускорения судна, снимаемый с датчика 1;
- сигнал углового ускорения судна, снимаемый с датчика 1; - сигнал несмещенной угловой скорости, вырабатываемый интегратором 7.
- сигнал несмещенной угловой скорости, вырабатываемый интегратором 7.
Сигнал V2 δ поступает на вход сумматора-усилителя 5 с выхода блока 11 перемножения. Этот сигнал позволяет перестраивать закон управления при изменении скорости хода судна, т.е. адаптироваться к изменению динамических характеристик судна.
Устройство может использоваться не только на морских судах, но и на речных. На существующих речных судах в подавляющих случаях нельзя использовать существующие авторулевые, так как эти суда не оборудованы гирокомпасами, которые необходимы для авторулевых. Достоинствами устройства являются также простота конструкции, дешевизна и безотказность благодаря использованию современных угловых акселерометров. Кроме того, достоинством являются высококачественные сигналы (в смысле динамических характеристик), что позволяет эффективно использовать устройство и на судах, не устойчивых по курсу.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 1992 |
|
RU2072547C1 |
| АППАРАТУРА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 1999 |
|
RU2155142C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 1998 |
|
RU2150409C1 |
| АППАРАТУРА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 1998 |
|
RU2144884C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ КУРСОМ СУДНА | 1991 |
|
RU2012919C1 |
| АППАРАТУРА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 2002 |
|
RU2221728C1 |
| АВТОРУЛЕВОЙ С ОЦЕНКОЙ УГЛОВОЙ СКОРОСТИ | 2004 |
|
RU2269451C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА С КОМПЕНСАЦИЕЙ МЕДЛЕННО МЕНЯЮЩИХСЯ ВОЗМУЩЕНИЙ | 2012 |
|
RU2492105C1 |
| АППАРАТУРА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 2003 |
|
RU2223197C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 1998 |
|
RU2133491C1 |
Изобретение относится к автоматизации управления подвижными объектами, в частности управления движением морских судов. Целью изобретения является повышение надежности функционирования устройства путем снижения уровня шумов в тракте управления рулевым приводом судна. Поставленная задача решается путем введения в устройство блока восстановления угловой скорости, датчика скорости хода и дополнительного сумматора. 1 ил.
УСТРОЙСТВО УПРАВЛЕНИЯ УГЛОВЫМ ДВИЖЕНИЕМ СУДНА, содержащее датчик перекладки руля и задатчик угловой скорости, выходы которых подключены соответственно к первому и второму входам сумматора-усилителя, к выходу которого подключен вход рулевого привода, датчик углового ускорения, выходом подключенный к третьему входу сумматора-усилителя непосредственно и через первый интегратор к его четвертому входу, отличающееся тем, что в него введены первый сумматор, датчик скорости хода и блок восстановления угловой скорости, содержащий второй - четвертый интеграторы, первый - пятый блоки перемножения и второй сумматор, при этом выход датчика перекладки руля подключен к первому входу блока восстановления угловой скорости, выход датчика скорости хода - к второму входу блока восстановления угловой скорости, первый выход которого соединен с пятым входом сумматора-усилителя, а второй выход - с первым входом первого сумматора, второй вход и выход которого подключены соответственно к выходу и второму входу первого интегратора, причем выход второго интегратора, первый вход которого является первым входом блока восстановления угловой скорости, подключен к своему второму входу и через второй сумматор соединен с первым входом первого блока перемножения, выход которого является первым выходом блока восстановления угловой скорости и подключен к первому входу третьего интегратора, выход второго блока перемножения, входы которого объединены и являются вторым входом блока восстановления угловой скорости, подключен к второму входу первого и первому входу третьего блоков перемножения, второй вход третьего блока перемножения соединен с первым входом второго интегратора и вторым входом второго сумматора, выход третьего интегратора является вторым выходом блока восстановления угловой скорости и соединен с первыми входами четвертого интегратора и четвертого блока перемножения, выход которого подключен к второму входу третьего интегратора, третий вход которого соединен с первым входом пятого блока перемножения и с выходом четвертого интегратора, второй вход которого подключен к выходу третьего блока перемножения, а третий вход - к выходу пятого блока перемножения, входы второго блока перемножения соединены с вторыми входами четвертого и пятого блоков перемножения.
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Система стабилизации курса судна | 1987 |
|
SU1529182A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
