Изобретение относится к контейнерным перевозкам, а более конкретно к средствам контейнеризации штучных изделий в том числе и пакетов кирпича.
Известны зажимные контейнера, предназначенные для транспортировки пакетов кирпича из линии обжига и на строительном объекте Б-8, Б-9 Ф-1 конструкции Суркова Д. Н. , и выбранный как прототип захват для пакетов штучных грузов и кирпича.
Захват содержит стойки, на которых смонтированы, связанные между собой подвижной осью челюсти, перемычку с гнездами для настройки захвата на груз с разными габаритами, шарнирно связанную своими гнездами, выдвижной шток, на верхнем конце которого установлена траверса для соединения с грузоподъемным механизмом, а нижний конец связан канатами, пропущенными через подвижные блоки полиспаста, с подвижной осью челюстей.
Прототип имеет ряд технических несовершенств: под воздействием тряски во время транспортировки верхние ряды пакета занимают форму и размеры жесткого кожуха захвата и при снятии захвата разрушаются; повторному захвату пакета препятствуют выдвинувшиеся от тряски кирпичи; наличие жесткого футляра увеличивает вес захвата, что требует значительных усилий монтажника при установке захвата на пакет и увеличивает металлоемкость захвата.
Цель изобретения - создание универсального захвата, не допускающего развала пакета без жесткого футляра.
Сущностью изобретения и его отличительными признаками являются наличие прижимной горизонтальной плиты, закрепленной на гибких или телескопических стойках с закрепленными на ней неподвижными блоками полиспаста, подвижные блоки которой закреплены на подвижной оси челюстей. Захват отличается наличием в прижимной системе амортизирующей пружины, установленной на перемычке, выполненной телескопически из двух частей. Захват отличается наличием защитного гибкого сетчатого ограждения вместо жесткого футляра в аналогах.
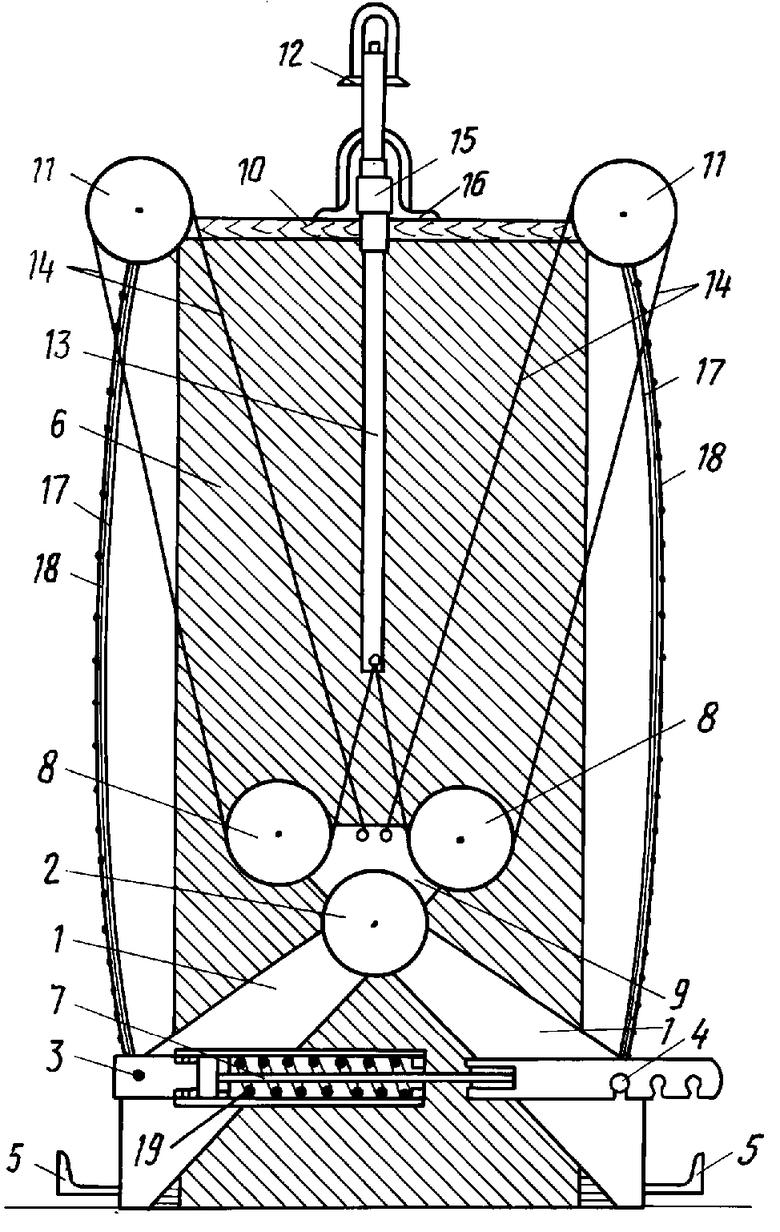
На чертеже изображен предлагаемый захват, вид с торца.
Здесь: 1 - челюсти захвата (расположены парами по торцам), 2 - подвижная ось челюстей (шарнирно соединена с концами (верхними) рычагов челюстей), 3 - неподвижная ось челюстей, 4 - неподвижная ось челюсти в виде стопорного болта фиксирующий неподвижную ось челюсти на перемычке, 5 - прижимные балки (завершают нижние концы челюстей на обоих торцах захвата), 6 - пакет штучных материалов, 7 - телескопическая перемычка (расположена на двух неподвижных осях челюстей), 8 - подвижные блоки полиспаста, 9 - корпус подвижного блока полиспаста (расположен на подвижной оси челюстей и несет на себе подвижные блоки полиспаста), 10 - прижимная горизонтальная плита (в рабочем состоянии находится на верхнем ряду пакета кирпичей), 11 - неподвижный блок полиспаста (закреплена на прижимной горизонтальной плите), 12 - траверса для соединения с грузовым механизмом, 13 - выдвижной шток (прикрепляется к траверсам), 14 - канат полиспаста, 15 - клиновое тормозное устройство, 16 - неподвижная траверса, 17 - гибкая стойка (расположена между прижимными балками и прижимной горизонтальной плитой), 18 - защитное гибкое сетчатое ограждение (прикрепляется к гибким стойкам), 9 - амортизационная пружина (расположена в телескопической перемычке).
Челюсти 1 под воздействием движения подвижной оси 2, поворачиваясь вокруг неподвижных осей 3 и 4, прижимными балками 5 зажимают нижний ряд пакета кирпичей 6 в горизонтальном направлении. Неподвижная ось челюстей 4 стопорным болтом соединяя челюсти 1 с телескопической перемычкой 7, меняя свое положение на ней настраивает захват на габариты пакета. Подвижная ось 2, связанная с подвижными блоками полиспаста 8, расположенными на корпусе подвижного блока полиспаста 9, передает на прижимную горизонтальную плиту 10 часть усилия зажима челюстей через неподвижные блоки полиспаста 11 от грузоподъемного механизма через траверсу 12 и выдвижной шток 13 посредством передачи усилий по канатам полиспаста 14. По завершении хода челюстей 1 и прижимной горизонтальной плиты, выдвижной шток 13 при помощи клинового тормозного устройства 15, закрепленного к подвижной траверсе 16. Гибкие стойки 17 несут на себе нагрузку от веса прижимной горизонтальной плиты в нерабочем состоянии и служат для крепления защитного гибкого сетчатого ограждения 9. Амортизационная пружина 19 восполняет напряжение в системе зажима при утряске пакета 6 от транспортировки. Съем захвата с пакета осуществляется посредством расслабления клинового тормозного устройства 18 и перестановки грузового крюка с подвижной траверсы 12 на неподвижную траверсу 16.
Экономический эффект от применения захвата ожидается за счет уcтранения перекладки разрушающихся верхних рядов пакета и экономии машинного времени грузоподъемных механизмов затрачиваемых при повторном загружении.
| название | год | авторы | номер документа |
|---|---|---|---|
| Захват клещевой | 1973 |
|
SU486993A1 |
| Устройство для монтажа вертикальных конструкций | 1980 |
|
SU906932A1 |
| Манипулятор | 1975 |
|
SU536003A1 |
| Контейнер-платформа | 1981 |
|
SU962119A1 |
| Захватное устройство для подъема и транспортирования бесподдонных пакетов кирпича | 1991 |
|
SU1789489A1 |
| Механизм управления челюстями грейфера | 1975 |
|
SU1081115A1 |
| Захват двухканатного типа для штучных грузов | 1960 |
|
SU136871A1 |
| Подъемно-транспортное устройство | 1990 |
|
SU1760047A1 |
| Выносные подмости для возведения стен из мелкоштучного материала | 1990 |
|
SU1794162A3 |
| УСТРОЙСТВО ДЛЯ ПОГРУЗКИ КИП СПРЕССОВАННОГО ЛЕКАРСТВЕННОГО СЫРЬЯ В КРУПНО-, СРЕДНЕ- И МАЛОТОННАЖНЫЕ КОНТЕЙНЕРЫ | 1999 |
|
RU2150394C1 |
Использование: в контейнерных перевозках. Захват для пакетов штучных грузов и кирпича содержит стойки, на которых смонтированы связанные между собой подвижной осью челюсти, перемычку с гнездами для настройки захвата на груз с разными габаритными размерами. Перемычка шарнирно связана своими гнездами с челюстями. На верхнем конце выдвижного штока установлена траверса для грузоподъемного механизма. Нижний конец выдвижного штока связан канатами, пропущенными через подвижные и неподвижные блоки полиспаста, с подвижной осью челюстей. Захват снабжен прижимной горизонтальной плитой, закрепленной на стойках. Неподвижные блоки установлены на плите, а подвижные блоки связаны с подвижной осью челюстей. Стойки выполнены гибкими. Перемычка выполнена телескопической из двух частей, связанных между собой пружиной. Захват снабжен гибким сетчатым ограждением. 1 ил.
