(54) МАНИПУЛЯТОР
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1984 |
|
SU1219223A2 |
| Устройство для загрузки и разгрузки стеллажей | 1983 |
|
SU1134484A1 |
| Телескопический складской кран | 1975 |
|
SU662003A3 |
| АВТОМАТИЗИРОВАННАЯ ТРАНСПОРТНАЯ ИНЕРЦИОННАЯ СИСТЕМА | 2017 |
|
RU2691682C1 |
| Стеллажный кран-штабелер | 1981 |
|
SU984944A1 |
| ПЛАВУЧИЙ РЕМОНТНЫЙ КОМПЛЕКС | 1988 |
|
RU2025402C1 |
| МАНИПУЛЯТОР | 1968 |
|
SU212027A1 |
| Перегружатель штучных грузов | 1982 |
|
SU1022876A1 |
| ПЕРЕДВИЖНОЙ РАЗГРУЗОЧНЫЙ КОМПЛЕКС | 2005 |
|
RU2414410C2 |
| Транспортный промышленный робот | 1987 |
|
SU1743845A1 |
Изобретение относится к механизации погрузочно-разгрузочных работ, а именно к манипуляторам, и может быть использовано при автоматизации процессов на операциях по транспортировке изделий в таре.
Известен манипулятор для транспортировки изделий в таре, содержащий платформу, перемещающуюся по рельсовому пути от привода, снабженную вертикальными направляющими, на которых смонтирована приводная подъемная рама с механизмом захвата, перемещающаяся в вертикальной плоскости.
Целью изобретения является обеспечение надежности захвата груза независимо от точности остановки манипулятора над грузом.
Это достигается тем, что предлагаелгый манипулятор снабжен пружинами, смонтированныма -в подъемной раме, промежуточной рамой, несущей ловители, сетчатое ограждение с приводом и тяги. Механизм захвата смонтирован на подъемной раме подвижно в горизолтальной плоскости и связан с подъемной рамой посредством тяг, взаимодействующих с пружинами подъемной рамы.
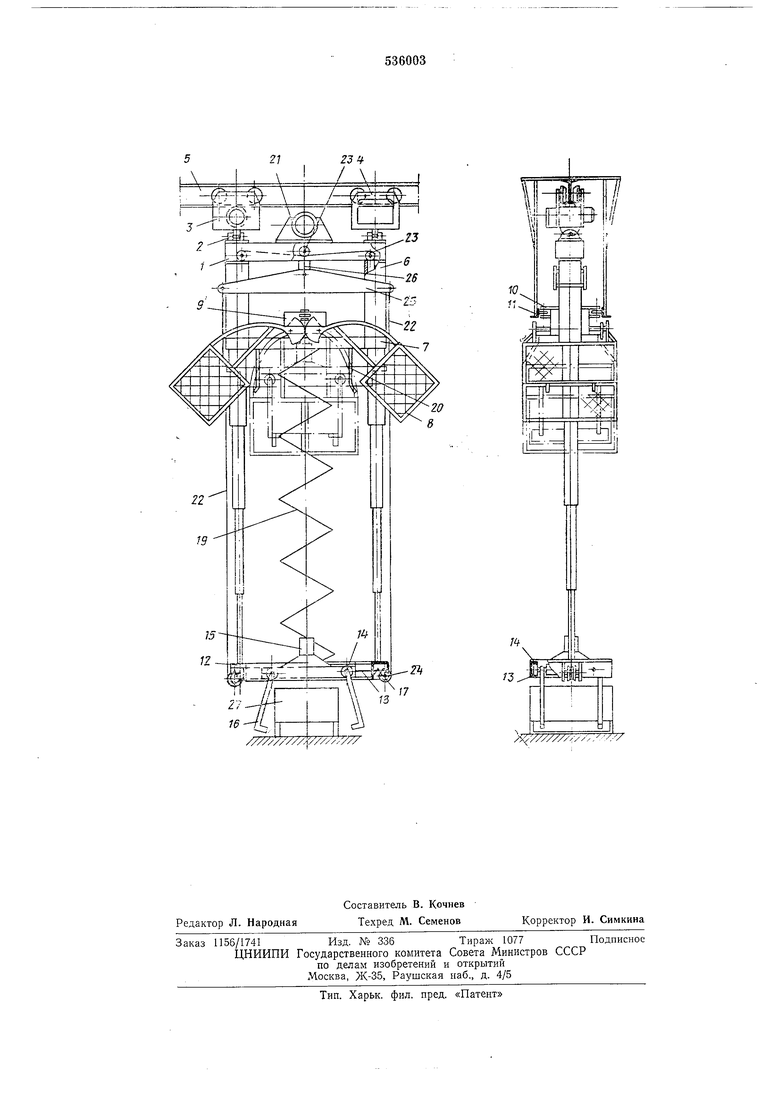
На чертеже изображен предлагаемый манипулятор, две проекции.
.Платформа 1 манипулятора подвешена ша.рн.ирно на проущинах 2 к приводной 3 и холостой 4 ,каретка м, установленным на ездовом монорельсе 5. Снизу к платформе / крепится пара вертикальных телескопических напра.вляющих 6, связанных про.межуточной рамой 7.
Промежуточная рама несет «а себе раздвижное сетчатое ограждение 8 с приводом 9 и бокозые опорлые ролики 10, контактирующие с контршинами 11 трассы.
Последние телескопы вертикальных наеравляющих 6 жестко связаны со сварной подъемной рамой 12, на внутренних полках 13 которой на катках 14 .находится механизм захвата 15 с рычагами 16.
Механизм захвата удерл ивается в среднем положен.ии на подъемной раме 12 пружинами 77, расположенными по концам рамы и воздействующими на механизм захвата через тяти 18.
Питание к механизму захвата 15 подводится по кабелю, прикрепленнному « винтовой проаолочной пружине 19, заделанной своими концами между механизмом захвата 15 и промежуточной рамой 7. Здесь же на раме 7 около пружины 19 установлены ловители 20, удерживающие механизм захвата 15 относительно подъемной рамы 12 неподвижно в его крайнем .верхнем полол ении.
Перемещение подъемной рамы 12 с механизмом захвата 15 по телескопическим направляющим 6 осуществля-ется от прлвода 21 на платформе / через канаты 22.
Канаты 22 проходят по неподвижным блокам 23 на платформе /, внутри полых телескопов направляющих 6, огибают подвижные блоки 24 на подъемной раме 12 и концами заделываются шарНИрно к уравнительной траверсе 25, подвешенной через ограничитель 26 грузоподъемности к платформе / снизу.
Манипулятор работает следующим образом. Остановившись над тарой 27, манипулятор с помощью привода 9 разводит в стороны половилы сетчатого ограждения 8, освобождая проход подъемной рамы 12 с механизмом захвата 15. Включается привод 21 на опускание рамы 12 « механизм захвата 15 выходит из ловителей 20, удерншваясь пружинами 17 в среднем положении на раме 12.
При достижении требуемой высоты опускание прекращается и включается механизм захвата 15, рычаги 16 которого начинают сближаться до соприкосновения с обеими стенками тары 27.
При этом неточность положения механизма захвата 15 над тарой 27 .компенсируется его смещением на катках 14 по внутренним полкам 13 рамы 12 ,в .результате упора в стенку тары любой пары рычагов 16, достигших стенки первыми. Таким образом, смещение центрирует механизм захвата 15 по таре 27 и вызывает сжатие пружин 17 на соответствующем конце подъемной рамы 12.
После взятия тары привод 21 реверсируется на подъем. В момент отрыва тары 27 от пола механизм захвата 15 под действием пружин 17 возвращается в среднее положение на
раме 12, а, войдя .в ловители 20 на промежуточной раме 7, становится неподвижным. Ограждение 8 закрывается, и манипулятор готов к передвижению на следующую позицию. Выгрузка тары осуществляется в обратном
порядке.
Формула изобретения
Манипулятор, содержащий платформу,
перемещающуюся по рельсовому пути, снабженную вертикальными направляющи.ми, на которых смонтирована приводная подъемная рама с механизмом захвата, перемещающаяся в вертикальной плоскости, посредством канатных полиспастов, отличающийся тем, что, с целью обеспечения надежности захвата груза независимо от точности остановки манипулятора над грузом, он снабжен пружинами, смонтированными в подъемной раме,
промежуточной рамой, несущей ловители, сетчатое ограждение с приводом и тяги, причем механизм захвата смонтирован на подъемной раме подвижно в горизонтальной плоскости и связан с подъемной рамой посредством тяг, взаимодействующих с пружинами подъемной рамы.
272311 I /
7
Ь
и
/7
