Изобретение относится к грузозахватным устройствам для штучных грузов и предназначено для подъема и транспортирования пакетов кирпича с подкладными рядами.
Известно захватное устройство для бесподдонных пакетов кирпича, содержащее несущую траверсу, подвешенный к ней посредством тяг четырехгранный корпус, внутри которого установлены с возможностью перемещения прижимные щиты, соединенные с тягами шарнирными звеньями, приспособление для фиксации щитов в нерабочем положении и каретку, установленную посредством заключенных в основании корпуса направляющих. Каретка снабжена захватными лапами. В нижней части корпуса установлены подпружиненные пластинчатые захватные органы для нижнего слоя кирпича, образованные верхними подвижными пластинами и боковыми распорными планками.
Это захватное устройство имеет большие габаритные размеры и сложную конструкцию.
Наиболее близким к изобретению техническим решением является захватное устройство для подъема и транспортирования бесподдонных пакетов кирпича, содержащее открытый с одной стороны жесткий каркас, жестко прикрепленные к его нижней части полые лапы, размещенные по бокам лап распорные планки для взаимодействие с рядами кирпича, расположенный внутри лап механизм перемещения распорных планок, включающий подпружиненный тяговый
N
00
ю
00
ч
орган, кинематически связанный с элементом навешивания на грузоподъемный механизм и с распорными планками,
Основным недостатком известного захватного устройства является низкая надежность.
Цель изобретения - повышение надежности захватного устройства,
Для этрго. в захватном устройстве для подъема и транспортирования бесподдонных пакетов кирпича, содержащем открытый с одной стороны жесткий каркас, жестко прикрепленные к его нижней части полые лапы, размещенные по бокам лап распорные планки для взаимодействия с рядами кирпича и расположенный внутри лап механизм перемещения распорных планок, включающий подпружиненный тяговый орган, кинематически связанный с элементом навешивания на грузоподъемный механизм и с распорными планками, элемент навешивания на грузоподъемный механизм представляет собой траверсу, тяговый орган выполнен из нескольких элементов, кинематическая связь тягового органа с распор- ными планками включает в себя подпружиненные коромысла, каждое из которых присоединено средней частью к смежным элементам тягового органа и концами - к распорным планкам, а кинематическая связь тягового органа с траверсой представляет собой канат, при этом устройство снабжено закрепленными на каркасе блоками, которые огибает указанный канат.
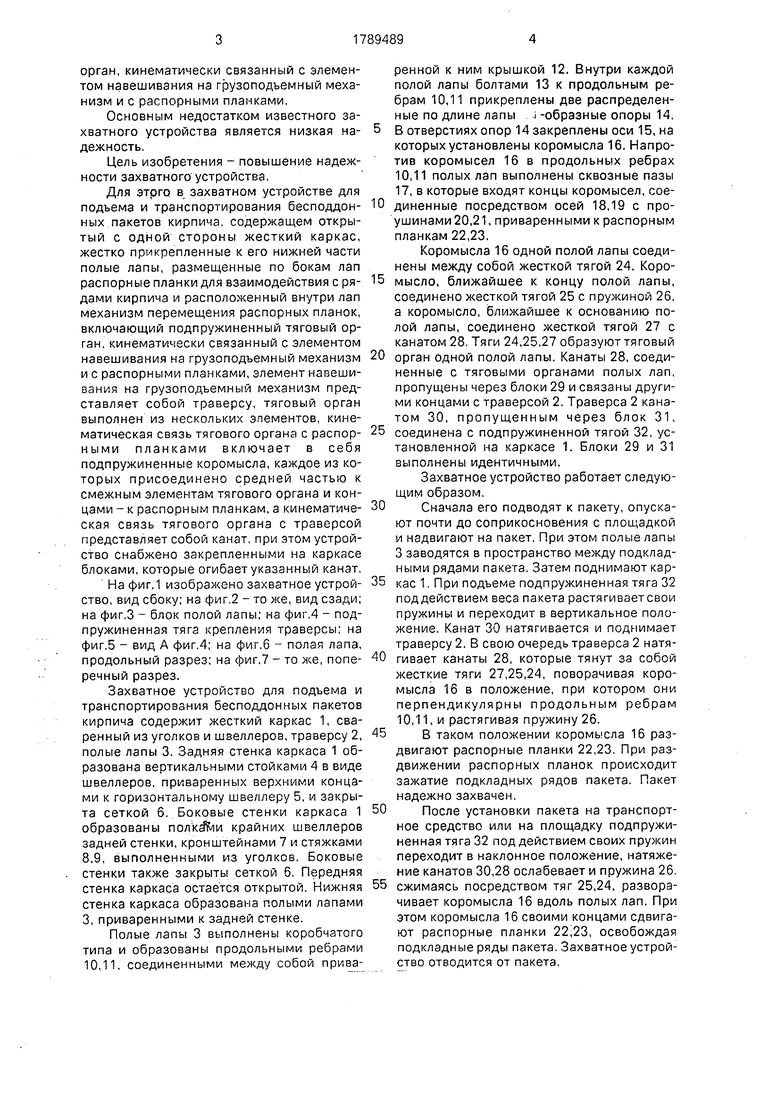
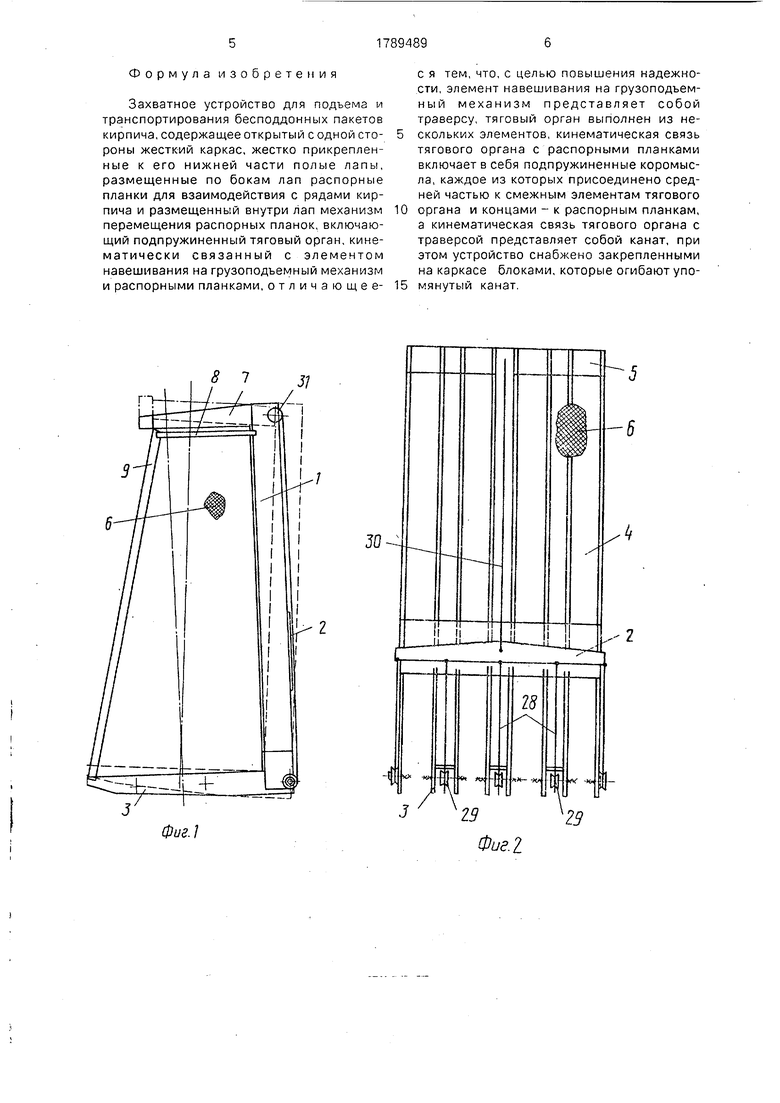
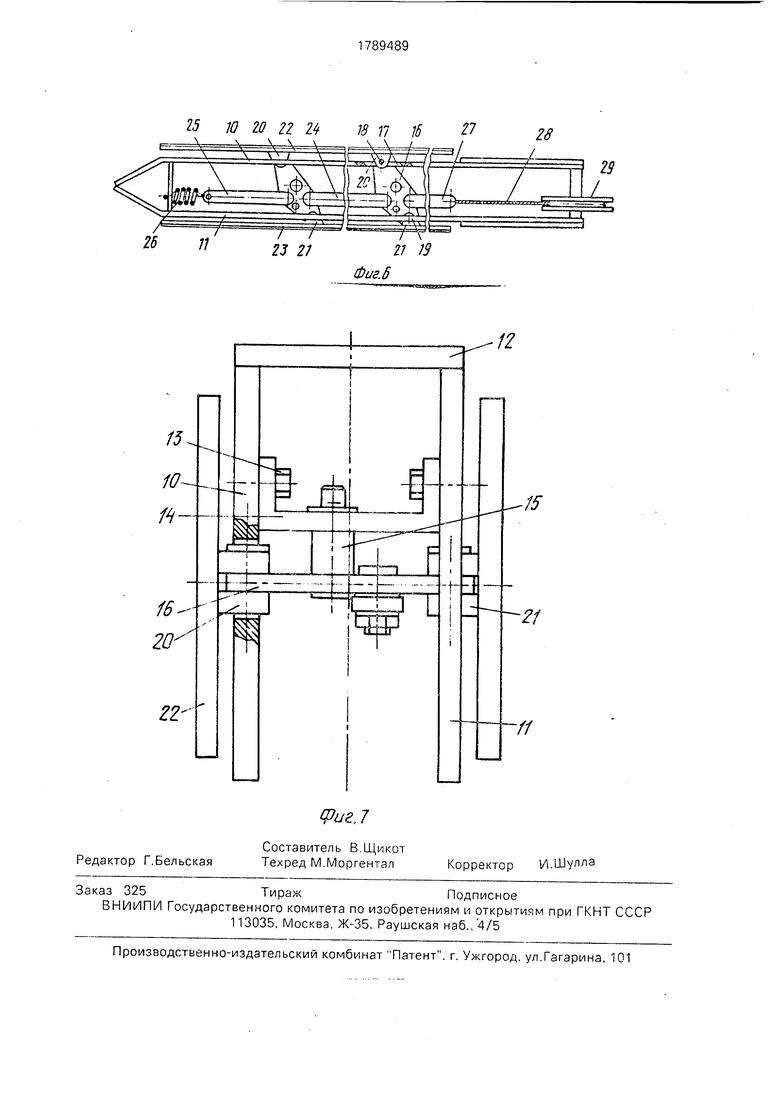
На фиг. 1 изображено захватное устройство, вид сбоку; на фиг.2 - то же, вид сзади; на фиг.З - блок полой лапы; на фиг.4 - подпружиненная тяга крепления траверсы; на фиг.5 - вид А фиг.4; на фиг.6 - полая лапа, продольный разрез; на фиг.7 - то же, поперечный разрез.
Захватное устройство для подъема и транспортирования бесподдонных пакетов кирпича содержит жесткий каркас 1, сваренный из уголков и швеллеров, траверсу 2, полые лапы 3. Задняя стенка каркаса 1 образована вертикальными стойками 4 в виде швеллеров, приваренных верхними концами к горизонтальному швеллеру 5, и закрыта сеткой 6. Боковые стенки каркаса 1 образованы полками крайних швеллеров задней стенки, кронштейнами 7 и стяжками 8,9, выполненными из уголков. Боковые стенки также закрыты сеткой 6. Передняя стенка каркаса остается открытой. Нижняя стенка каркаса образована полыми лапами 3, приваренными к задней стенке.
Полые лапы 3 выполнены коробчатого типа и образованы продольными ребрами 10,11, соединенными между собой приваренной к ним крышкой 12. Внутри каждой полой лапы болтами 13 к продольным ребрам 10,11 прикреплены две распределенные по длине лапы j -образные опоры 14.
В отверстиях опор 14 закреплены оси 15, на которых установлены коромысла 16. Напротив коромысел 16 в продольных ребрах 10,11 полых лап выполнены сквозные пазы 17, в которые входят концы коромысел, соединенные посредством осей 18,19 с проушинами 20,21, приваренными к распорным планкам 22,23.
Коромысла 16 одной полой лапы соединены между собой жесткой тягой 24. Коро5 мысло, ближайшее к концу полой лапы, соединено жесткой тягой 25 с пружиной 26, а коромысло, ближайшее к основанию полой лапы, соединено жесткой тягой 27 с канатом 28. Тяги 24,25,27 образуют тяговый
0 орган одной полой лапы. Канаты 28, соединенные с тяговыми органами полых лап, пропущены через блоки 29 и связаны другими концами с траверсой 2. Траверса 2 канатом 30, пропущенным через блок 31,
5 соединена с подпружиненной тягой 32, установленной на каркасе 1. Блоки 29 и 31 выполнены идентичными,
Захватное устройство работает следующим образом.
0 Сначала его подводят к пакету, опускают почти до соприкосновения с площадкой и надвигают на пакет. При этом полые лапы 3 заводятся в пространство между подкладными рядами пакета. Затем поднимают кар5 кас 1. При подъеме подпружиненная тяга 32 поддействием веса пакета растягивает свои пружины и переходит в вертикальное положение. Канат 30 натягивается и поднимает траверсу 2. В свою очередь траверса 2 натя0 гивает канаты 28, которые тянут за собой жесткие тяги 27,25,24, поворачивая коромысла 16 в положение, при котором они перпендикулярны продольным ребрам 10,11, и растягивая пружину 26.
5в таком положении коромысла 16 раздвигают распорные планки 22,23. При раз- движении распорных планок происходит зажатие подкладных рядов пакета. Пакет надежно захвачен,
0 После установки пакета на транспортное средство или на площадку подпружиненная тяга 32 под действием своих пружин переходит в наклонное положение, натяжение канатов 30,28 ослабевает и пружина 26.
5 сжимаясь посредством тяг 25,24, разворачивает коромысла 16 вдоль полых лап. При этом коромысла 16 своими концами сдвигают распорные планки 22,23, освобождая подкладные ряды пакета. Захватное устройство отводится от пакета.
Формула изобретения
Захватное устройство для подъема и транспортирования бесподдонных пакетов кирпича, содержащее открытый с одной стороны жесткий каркас, жестко прикрепленные к его нижней части полые лапы, размещенные по бокам лап распорные планки для взаимодействия с рядами кирпича и размещенный внутри лап механизм перемещения распорных планок, включающий подпружиненный тяговый орган, кинематически связанный с элементом навешивания на грузоподъемный механизм и распорными планками, отличаю щеес я тем, что, с целью повышения надежности, элемент навешивания на грузоподъемный механизм представляет собой траверсу, тяговый орган выполнен из нескольких элементов, кинематическая связь тягового органа с распорными планками включает в себя подпружиненные коромысла, каждое из которых присоединено средней частью к смежным элементам тягового
органа и концами - к распорным планкам, а кинематическая связь тягового органа с траверсой представляет собой канат, при этом устройство снабжено закрепленными на каркасе блоками, которые огибают упомянутый канат.
| название | год | авторы | номер документа |
|---|---|---|---|
| Захватное устройство для подъема и транспортирования пакетов кирпича | 1980 |
|
SU895884A1 |
| Захватное устройство для бесподдонных пакетов кирпича | 1979 |
|
SU895882A1 |
| ВИЛОЧНЫЙ ЗАХВАТ ДЛЯ ПАКЕТИРОВАННЫХ ГРУЗОВ | 1969 |
|
SU233858A1 |
| ЗАХВАТНОЕ УСТРОЙСТВО ДЛЯ БЕСПОДДОНКОГО ТРАНСПОРТИРОВАНИЯ КИРПИЧА | 1970 |
|
SU272514A1 |
| Грузозахватное устройство | 1989 |
|
SU1751138A1 |
| АВТОЗАХВАТ ДЛЯ ТРАНСПОРТИРОВКИ МЕЛКОШТУЧНЫХ БЕТОННЫХ ИЗДЕЛИЙ | 2007 |
|
RU2337052C1 |
| Захватное устройство для штучных грузов | 1981 |
|
SU1065325A1 |
| Противоугонный захват для кранов | 1982 |
|
SU1074807A1 |
| Захватное устройство для труб | 1986 |
|
SU1425165A1 |
| Захватное устройство для грузовС цЕНТРАльНыМ ОТВЕРСТиЕМ | 1978 |
|
SU810598A1 |
Сущность изобретения: захватное устройство содержит открытый с одной стороны жесткий каркас, жестко прикрепленные к его нижней части полые лапы, размещенные по бокам лап распорные планки 22,23 для взаимодействия с рядами кирпича и расположенный внутри лап механизм перемещения распорных планок 22,23, включающий подпружиненный тяговый орган, кинематически связанный с элементом навешивания на грузоподъемный механизм и с распорными п,ланками. Элемент навешивания на грузоподъемный механизм представляет собой траверсу. Тяговый орган выполнен из жестких тяг 24,25,27. Кинематическая связь тягового органа с распорными планками 22,23 включает в себя подпружиненные коромысла 16, каждое из которых присоединено средней частью к сменным элементам тягового органа и концами - к распорным планкам 22,23. Кинематическая связь тягового органа каждой полой лапы с траверсой представляет собой канат 28. Устройство снабжено закрепленными на каркасе блоками 29, которые огибают канаты 28. 7 ил. Ј
Фиг.1
Фие.1
| Вилочный захват для пакетированных грузов | 1983 |
|
SU1152914A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
